1390
Effects of geometric distortions on navigator accuracy for motion corrected brain imaging at 7T1Philips Healthcare, Copenhagen, Denmark, 2Danish Research Centre for Magnetic Resonance, Centre for Functional and Diagnostic Imaging and Research, Copenhagen University Hospital Hvidovre, Hvidovre, Denmark
Synopsis
High resolution structural brain imaging at 7T can benefit from motion correction with volumetric navigators. Echo-planar-imaging (EPI) can reduce navigator durations and therefore allow for higher resolution navigators which are tempting to use to increase accuracy of the movement parameters. However, the severe B0 inhomogeneities at 7T lead to geometric distortions that change with head position and therefore lower navigator accuracy. We investigated the navigator accuracy for water and fat navigators of different resolutions and EPI readout durations. We found that the realignment parameter error grows with the amount of motion, voxel size, and EPI readout duration.
Introduction
Motion correction with volumetric navigators can improve image quality for structural brain sequences at both 3T and 7T1–7. At 7T, accuracy of volumetric navigators without EPI has been evaluated for different resolutions and parallel imaging accelerations8. However, EPI navigators are faster and therefore allow more flexibility in sequence design, but geometric distortions are severe at 7T which could impact navigator accuracy. We used a multi-echo sequence to obtain water, fat, B0 and T2* maps in different head positions, which enabled simulating the effect of EPI readouts for navigator accuracy at 7T.Methods
Imaging was performed on a 7T MRI system (Achieva; Philips Healthcare, Best, The Netherlands) using a two-channel transmit, 32 receive head coil (Nova Medical, Inc., Wilmington, Massachusetts). Experiments were performed on 3 healthy volunteers who provided written informed consent prior to examination. Two imaging time series of 20 volumes each, were acquired per subject. For one of the series, the subjects were asked to perform shaking movements (head rotation around the superior-inferior axis) and for the other series the subjects were asked to perform nodding movements. The subjects were asked to remain still during scanning and move to a new position between each volume acquisition, which were manually started by the operator. Second order B0 shimming was performed based on a whole brain B0 map in the starting position.The imaging sequence was a spoiled, 3D, multi-echo gradient echo sequence with 10 echoes at alternating readout gradient polarities and TE=1.33 + n*1.3 ms, n=0…9. A tip angle of 10° was used, TR = 14.6ms, BW/pixel=1554Hz, FOV (AP,RL,FH) of 256x256x230 mm (+ oversampling factor 1.4 in the FH direction), voxel size of 2 mm isotropic, SENSE factors (APxFH) of 2.5x2.5, and an elliptical k-space shutter, resulting in a dynamic scan time of 38.5s per volume.
From each multi-echo volume water, fat, B0 and T2* maps were calculated by the scanner software. These were used for simulating different water and fat navigators. First, the effect of different navigator echo times was simulated by multiplying the water and fat maps voxel-wise by $$$exp(-TE/T_2^*-i2πB_0TE)$$$ , using the corresponding values from the B0 and T2* maps. Different resolutions were then simulated by reducing the matrix size in k-space, and apodization filtering as in the scanner software to reduce ringing. Lastly, geometric distortions in the anterior-posterior direction were simulated using a warping algorithm and a voxel displacement map calculated by multiplying the readout durations with the B0 maps.
Navigators with voxel sizes of 2, 2.7, 4, 5.3, 8 and 10.7 mm were simulated without EPI (readout duration=0 ms, TE =0 ms), and with single-shot EPI readout in the transverse plane, with readout durations corresponding to parallel imaging accelerations of 1, 3, 5, and echo times in the center of the readout (no partial Fourier). Both positive and negative readout directions were simulated. Fat navigators with echo times above 10 ms were not simulated as the short T2* of fat would make such navigators too low SNR for practical use. Each generated navigator time series was realigned using the same realignment routine that is available on the scanner. This is based on a mean squared error cost function with Gauss-Newton optimization. A brain masked version of the original 2 mm water images was used as a golden standard for comparison with the various simulated navigators. The brain masks were generated using SPM. To summarize the 6 motion parameters into one parameter, the motion score parameter by Tisdall et al.3 was used, which is the equivalent displacement on the surface of a sphere with 64 mm radius (approximating a human head).
Results
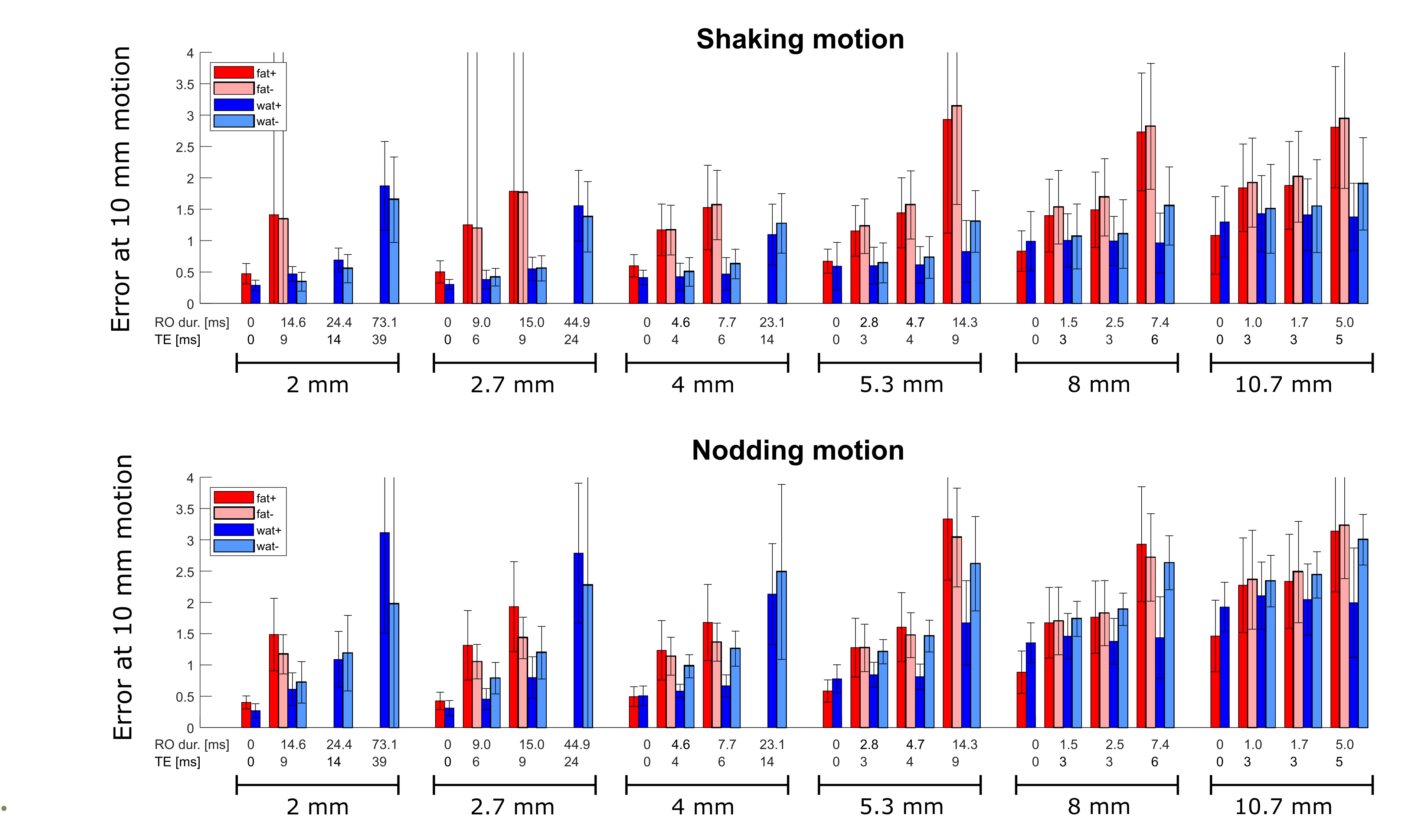
Examples of the simulated navigators are shown in Figure 1. Three volumes with large motion were discarded, as the realignment of the golden standard did not converge for those. The remaining movements performed in all experiments are shown in Figure 2. The challenge with realignments of geometrically distorted images is illustrated in Figure 3.For each navigator, the error in the motion parameters was approximated to linearly grow with the amount of motion (examples in Figure 4). The values of the fits at 10 mm motion of the golden standard, are shown in Figure 5 for all the simulated navigators. Clearly, the realignment error grows with voxel size and with readout and echo time. For the long readout and echo times, the error for the fat navigators are higher than for the water navigators. For the water navigators the error was higher for nodding than for shaking movements.
Discussion and conclusion
Using multi-echo data in different positions, we were able to simulate navigators with various acquisition parameters, and compare navigator accuracy to a golden standard. Navigator accuracy increased with increased spatial resolution for non-EPI scans, however, this would lead to long acquisition times for navigator scans. Acceleration using EPI leads to increased distortions, and as shown here also to reduced navigator accuracy. As higher resolution in a single shot require longer readout durations, a high resolution navigator can perform worse than a lower resolution counterpart. The larger the motion, the larger the error.The proposed method can help to understand some of the tradeoffs involved when designing navigator sequences.
Acknowledgements
This research is supported by the John and Birthe Meyer Foundation.References
1. Andersen M, Björkman-Burtscher IM, Marsman A, Petersen ET, Boer VO. Improvement in diagnostic quality of structural and angiographic MRI of the brain using motion correction with interleaved, volumetric navigators. Todd N, ed. PLoS One. 2019;14(5):e0217145. doi:10.1371/journal.pone.0217145
2. Tisdall MD, Reuter M, Qureshi A, Buckner RL, Fischl B, van der Kouwe AJW. Prospective motion correction with volumetric navigators (vNavs) reduces the bias and variance in brain morphometry induced by subject motion. Neuroimage. 2016;127:11-22. doi:10.1016/j.neuroimage.2015.11.054
3. Tisdall MD, Hess AT, Reuter M, Meintjes EM, Fischl B, Van Der Kouwe AJW. Volumetric navigators for prospective motion correction and selective reacquisition in neuroanatomical MRI. Magn Reson Med. 2012;68(2):389-399. doi:10.1002/mrm.23228
4. Glessgen C, Gallichan D, Moor M, Hainc N, Federau C. Evaluation of 3D fat-navigator based retrospective motion correction in the clinical setting of patients with brain tumors. Neuroradiology. 2019;61(5):557-563. doi:10.1007/s00234-019-02160-w
5. Gallichan D, Marques JP, Gruetter R. Retrospective correction of involuntary microscopic head movement using highly accelerated fat image navigators (3D FatNavs) at 7T. Magn Reson Med. 2016;75(3):1030-1039. doi:10.1002/mrm.25670
6. Bazin P-L, Nijsse HE, van der Zwaag W, et al. Sharpness in Motion Corrected Quantitative Imaging at 7T. Neuroimage. 2020;222(March):117227. doi:10.1016/j.neuroimage.2020.117227
7. Truong M, Bloch KM, Andersen M, Andsberg G, Töger J, Wassélius J. Subacute vessel wall imaging at 7-T MRI in post-thrombectomy stroke patients. Neuroradiology. June 2019. doi:10.1007/s00234-019-02242-9
8. Gallichan D, Marques JP. Optimizing the acceleration and resolution of three-dimensional fat image navigators for high-resolution motion correction at 7T. Magn Reson Med. 2017;77(2):547-558. doi:10.1002/mrm.26127
Figures