1370
Self-navigating 3D-EPI Sequence for Prospective Motion Correction
Samuel Getaneh Bayih1, Ernesta Meintjes1, Marcin Jankiewicz1, and Andre van der Kouwe 2,3
1MRT/UCT Medical Imaging Research Unit, Department of Human Biology, University of Cape Town, Cape Town, South Africa, 2Athinoula A. Martinos Center for Biomedical Imaging, Charlestown, MA, United States, 3Department of Radiology, Harvard Medical School, Boston, MA, United States
1MRT/UCT Medical Imaging Research Unit, Department of Human Biology, University of Cape Town, Cape Town, South Africa, 2Athinoula A. Martinos Center for Biomedical Imaging, Charlestown, MA, United States, 3Department of Radiology, Harvard Medical School, Boston, MA, United States
Synopsis
Prospective motion correction typically requires additional pulses or hardware to track subject motion, incurring extra costs and increasing the complexity of an MRI experiment. We present a prospective motion tracking solution that instead constructs a volumetric self-navigator from a subset of the partitions acquired during 3D-EPI, thereby allowing motion during and between successive 3D-EPI measurements to be detected and corrected in real time. This work facilitates motion-robust 3D-EPI acquisition for functional MRI applications.
Target Audience
Researchers and clinicians interested in performing prospective motion correction without additional pulses or hardware to track subject motion.Purpose
Prospective motion correction (PMC) uses either additional pulses 1 or hardware to detect and track subject motion 2,3. However, even after including additional pulses into the sequence that could potentially increase the scanning time, or installing and calibrating a tracking hardware system, the performance of PMC is mostly dependent on the factors that are unaffected by the tracking system, like the magnitude and frequency of motion. In this work, we developed a PMC solution that does not require additional pulses or hardware to track head motion during successive 3D-EPI acquisitions such as would be required for a functional MRI experiment. The proposed PMC solution was implemented in a 3D-EPI sequence due to its higher signal-to-noise ratio (SNR), higher temporal SNR (tSNR) and ability to be highly accelerated along the partition direction compared to 2D-EPI 4.Methods
Each 3D-EPI volume acquires partitions from the center of k-space in a middle-to-outside ordering scheme. The image reconstruction program was modified to include a second functional block. While the original online block (OB) accumulates all partitions to reconstruct the ith volume, the feedback block (FB) accumulates a subset of the partitions, zero filling the remaining partitions. The FB then constructs a volumetric self-navigator (vsNavi ) (see Fig.1), which can be used to track motion between successive volumes. The 1st vsNav is stored as a reference, vsNavRef, to which subsequent navigators are registered using prospective acquisition correction (PACE) 5 to estimate head pose changes (i.e. motion parameters). Motion parameters are fed back to the sequence once every measurement to update the field of view (FOV) prior to acquisition of subsequent partitions.In this work, the 18 partitions following the first 12 (i.e. #11-19 and #32-40) of a total of 52 were accumulated in the FB for motion tracking. This selection of partitions allows for detection of motion around mid-acquisition of a measurement without losing the imaging features contained at low k-space frequencies. The self-navigated 3D-EPI was validated in a healthy volunteer who was instructed to move at specific times during the acquisition. Imaging parameters were: TR 64 ms, TE 30 ms, voxel size 3.1x3.1x3.1 mm3, flip angle 18o, 64x64x52 acquisition matrix and bandwidth 2298 Hz/pixel.
Results
Figure 2 shows prospectively motion corrected image volumes. The volumes shown were acquired before, during and immediately after motion occurred, illustrating effective ‘real-time’ correction of the FOV following a motion event. Figure 3 shows the corresponding navigator volumes with translation and rotation parameters given at the bottom of each image, except for the reference. Notably, motion estimates are higher in (b) after motion occurred, and are lower in (c) after the correction has been applied.Discussion and Conclusion
The number and position of the partitions used in the FB determines the frequency and accuracy of motion detection and correction. Too few features in the self-navigator volumes could result in failure to detect motion. Constructing multiple self-navigators per measurement volume may improve the frequency of motion detection and correction. Future work will also aim to perform real-time shim correction.Acknowledgements
South African National Research Foundation (NRF), Grant number: 48337 and The National Institutes of Health (NIH) grants R01HD085813, R01HD099846 and R01HD093578.
References
[1] van der Kouwe et.al Magn. Reson. in Med. 2006; 56: 1019 – 1032. [2] Ooi et.al. Magn. Reson. in Med. 2009; 62: 943 – 954. [3] Todd et.al. NeuroImage. 2015; 113:1 – 12. [4] Setsompop et.al. Magn. Reson. in Med. 2012; 67:1210 – 1224. [5] Thesen et.al. Magn. Reson. in Med. 2000; 44:457 – 465.Figures
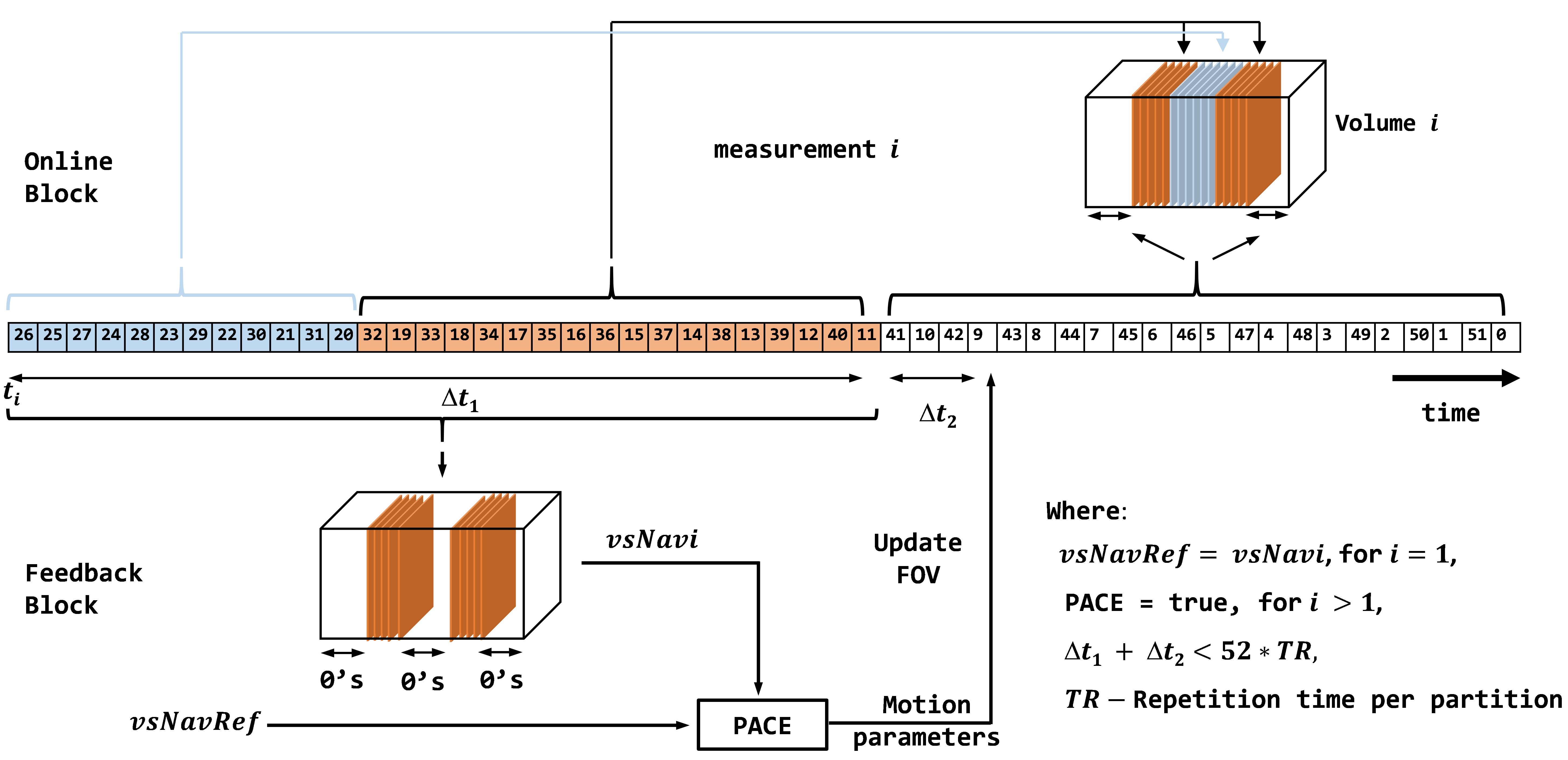
Figure 1: Self-navigating 3D-EPI sequence
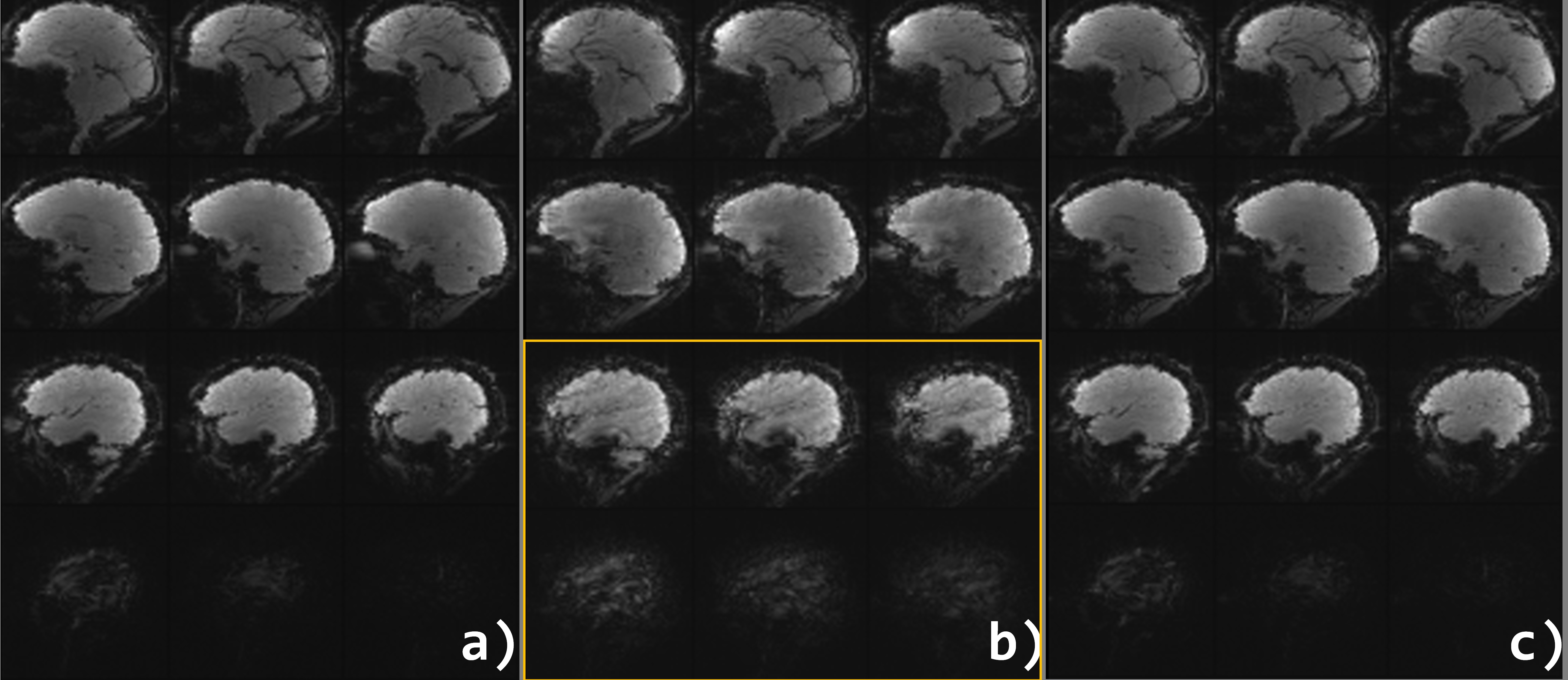
Figure 2: Volumetric images acquired
(a) before motion occurred (reference volume), (b) when motion occurred, and
(c) the next volume after motion occurred.
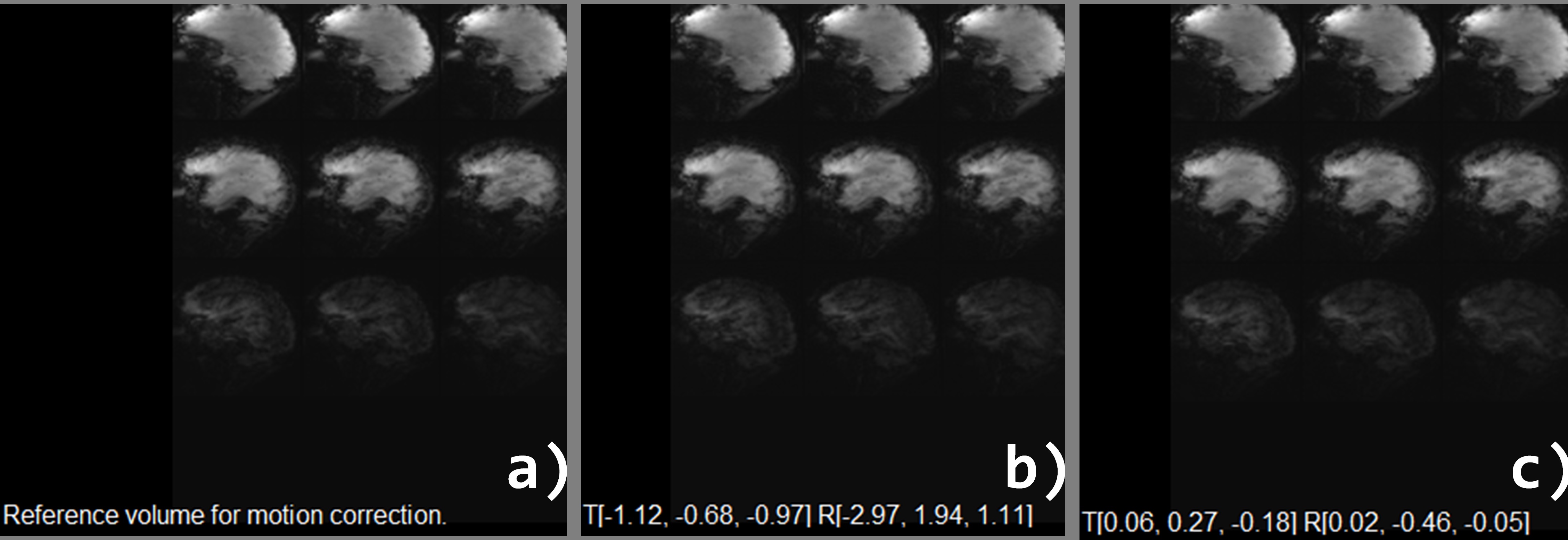
Figure 3: Volumetric self-Navigators corresponding to
volumes in Figure 2. (a) vsNavRef (b) vsNavi when
motion occurred, and (c) vsNav(i+1) after
motion occurred. Translation and rotation parameters (mm/o) are
given at the bottom of images (b) and (c).