1327
The Influence of Navigator Acquisition on 3D Multi-slab DWI Reconstruction: A Comparison between 2D, 3D Acquired and Synthesized Navigator1Center for Biomedical Imaging Research, Department of Biomedical Engineering, School of Medicine, Tsinghua University, Beijing, China, 2Department of Radiology, Stanford University, Stanford, CA, United States
Synopsis
3D multi-slab is SNR-efficient for isotropic high-resolution diffusion imaging. It can be combined with simultaneous multi-slice, namely SMSlab, for optimal SNR efficiency. In multi-slab, either 2D or 3D navigators can be acquired for inter-shot phase correction, while in SMSlab, only 2D navigators can be acquired. One study has proposed to synthesize a 3D navigator from a 2D navigator in SMSlab, yet lacking a comparison. This study compares the performance of 2D, 3D acquired and synthesized navigators. The synthesized 3D navigator shows similar performance with the acquired 3D navigator in multi-slab and outperforms the 2D navigator in both multi-slab and SMSlab.
Introduction
Recently, 3D multi-slab has been proposed as an SNR efficient acquisition method for isotropic high-resolution diffusion imaging 1-3. It can be further combined with simultaneous multi-slice for optimal SNR efficiency 4,5. Due to the multi-shot acquisition manner of multi-slab and SMSlab, they require the correction for inter-shot phase variations induced by motion in the presence of diffusion encoding gradients. In multi-shot DWI, an additional navigator echo is usually acquired to record the motion induced phase. The navigator can be applied for phase correction in the image domain 6, or it can be treated as a kind of image encoding for k-space-based reconstruction 7. The k-space-based reconstruction method has been previously demonstrated to be more tolerable to distortion mismatch between navigator and image-echo in 2D ms-EPI diffusion imaging 7.For 3D multi-slab imaging, the navigator can be designed as a 2D or 3D acquisition. For SMSlab, however, the navigator can only be acquired as 2D, due to the inter-slab gap induced phase interference in the presence of kz encoding gradients 5. A previous study has proposed to synthesize a 3D navigator from a 2D navigator in SMSlab to fully use the 3D coil sensitivity information 4, yet there hasn’t been a comparison to demonstrate the advantage of a synthesized 3D navigator over the 2D navigator.
In this study, we compare the performance of 2D, acquired 3D and synthesized 3D navigators in the k-space-based reconstruction of 3D multi-slab DWI, and compare the performance of 2D and synthesized 3D navigators for SMSlab DWI.
Methods
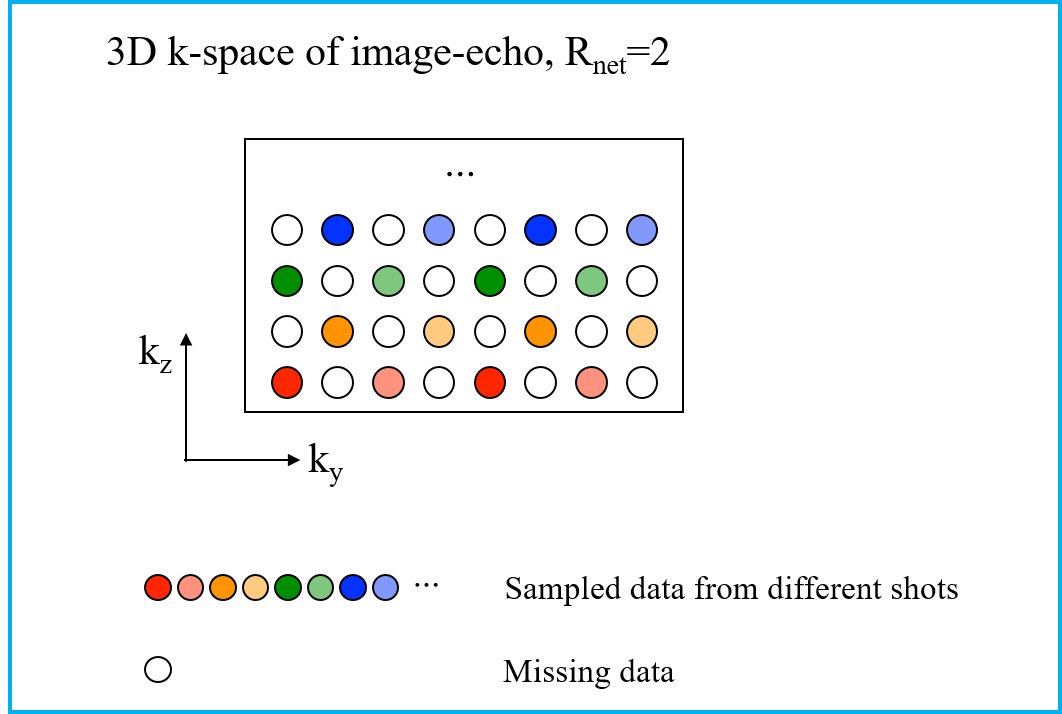
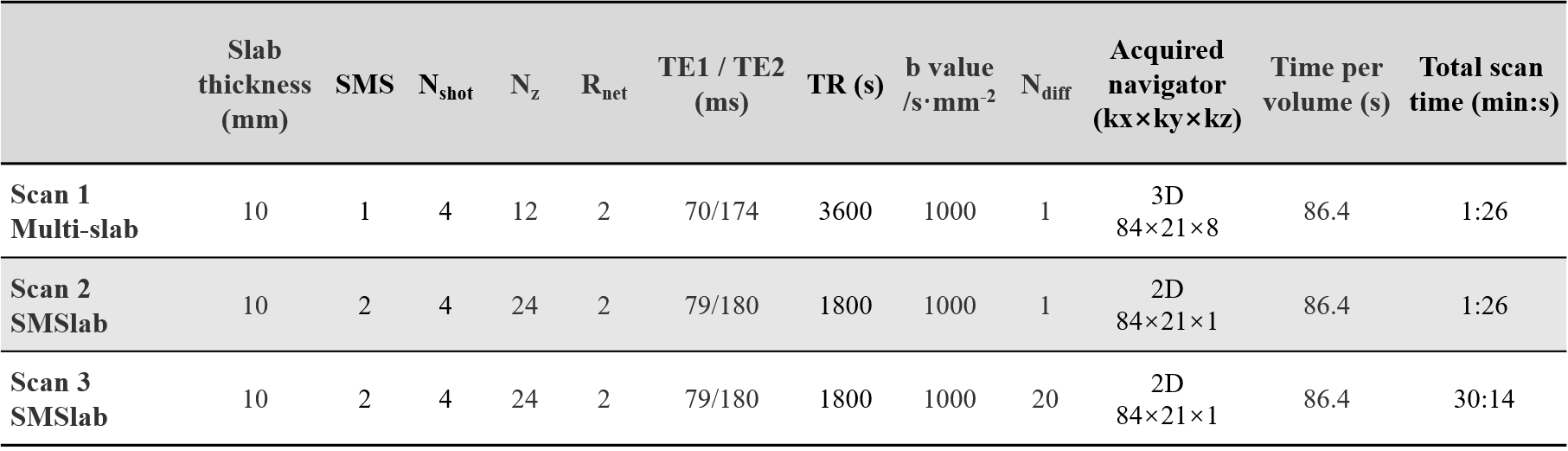
This study was approved by the local Institutional Review Board and written informed consent was obtained from the healthy volunteers. The 1 mm isotropic whole-brain diffusion data were acquired using multi-slab and SMSlab, with a 32-channel head coil on a Philips 3.0T scanner. The specific acquisition parameters are listed in Table 1. CAIPI sampling with Rnet=2 (Figure 1) was adopted to reduce g-factor penalty. Root-flipped RF pulses were used to reduce TE 8.In multi-slab, after the image-echo, a 3D navigator was acquired with 5 kz encodings within a shot. The kz=0 plane of the 3D navigator can be extracted as a 2D navigator, and then synthesized to a 3D navigator, for comparison purpose. In SMSlab, a 2D navigator with SMS=2 was acquired and then unfolded to two thick 2D slices, and subsequently synthesized to a 3D navigator.
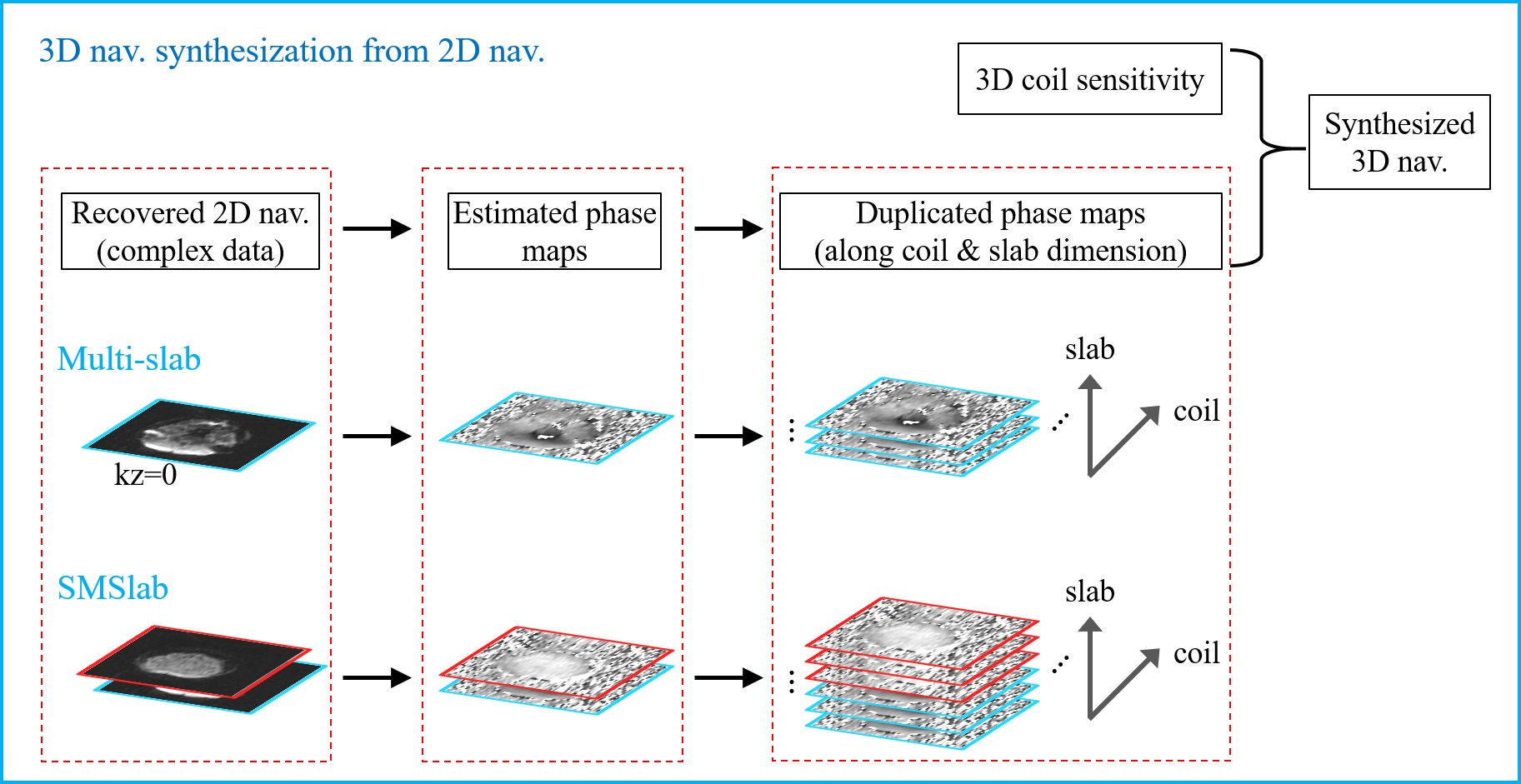
The detailed 3D synthesization process of the 2D navigator for multi-slab and SMSlab is shown in Figure 2. First, complex 2D navigator images are generated by complex coil combination, which include both the magnitude and motion induced phase for each shot. The phase maps are extracted and duplicated along the coil and slice dimension, then multiplied by the sensitivity map at each coil and slice location, and finally 3D Fourier transformed to generate the synthesized 3D navigator.
The data are reconstructed in k-space, using an extended GRAPPA with a compact kernel (GRAPPA-CK) 7 in 3D k-space 9. For the reconstruction with the 2D navigator, the GRAPPA kernel size along kz is 1 for multi-slab and 2 for SMSlab, while for the reconstruction with the acquired 3D or synthesized 3D navigator, the GRAPPA kernel size along kz can be flexible, which is 3 in this work.
The slab boundary artifacts are corrected by the nonlinear inversion for slab profile encoding modified (NPEN) algorithm 2, which is further modified for SMSlab 4,5.
Results and Discussion
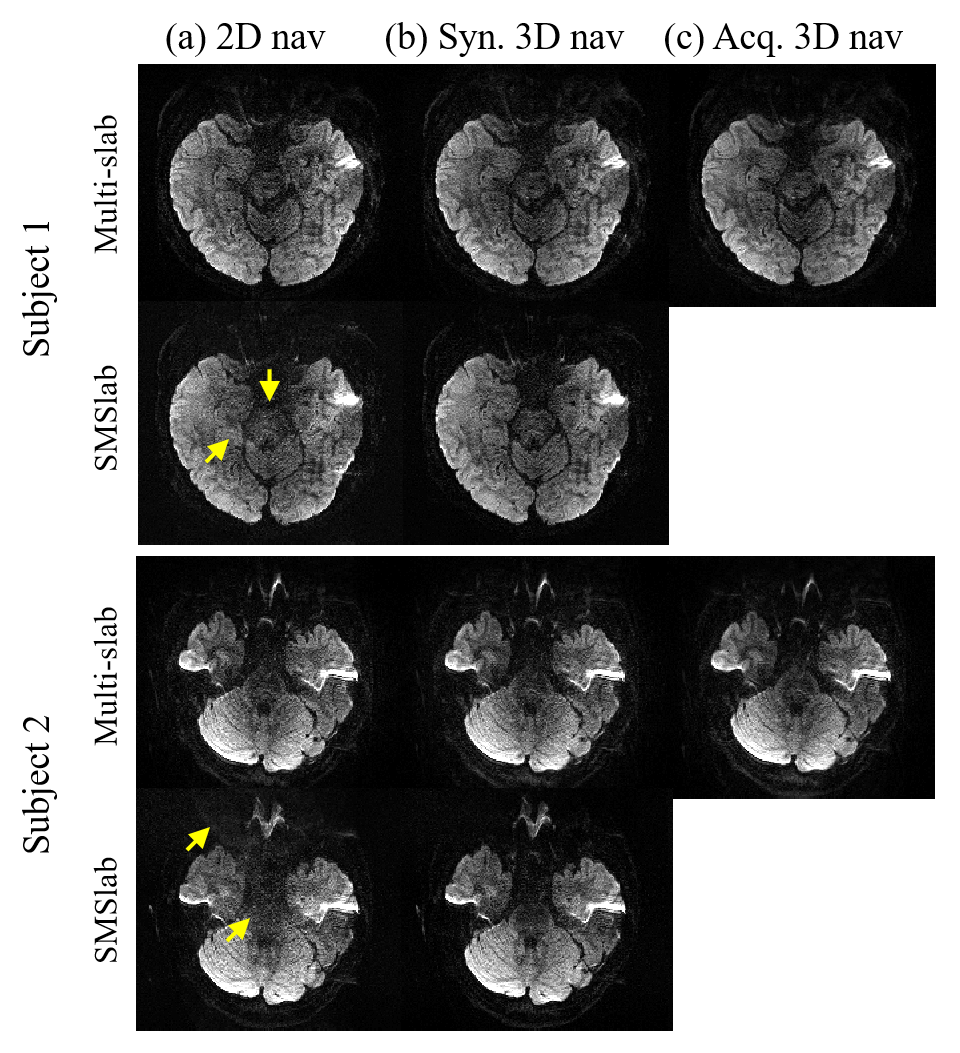
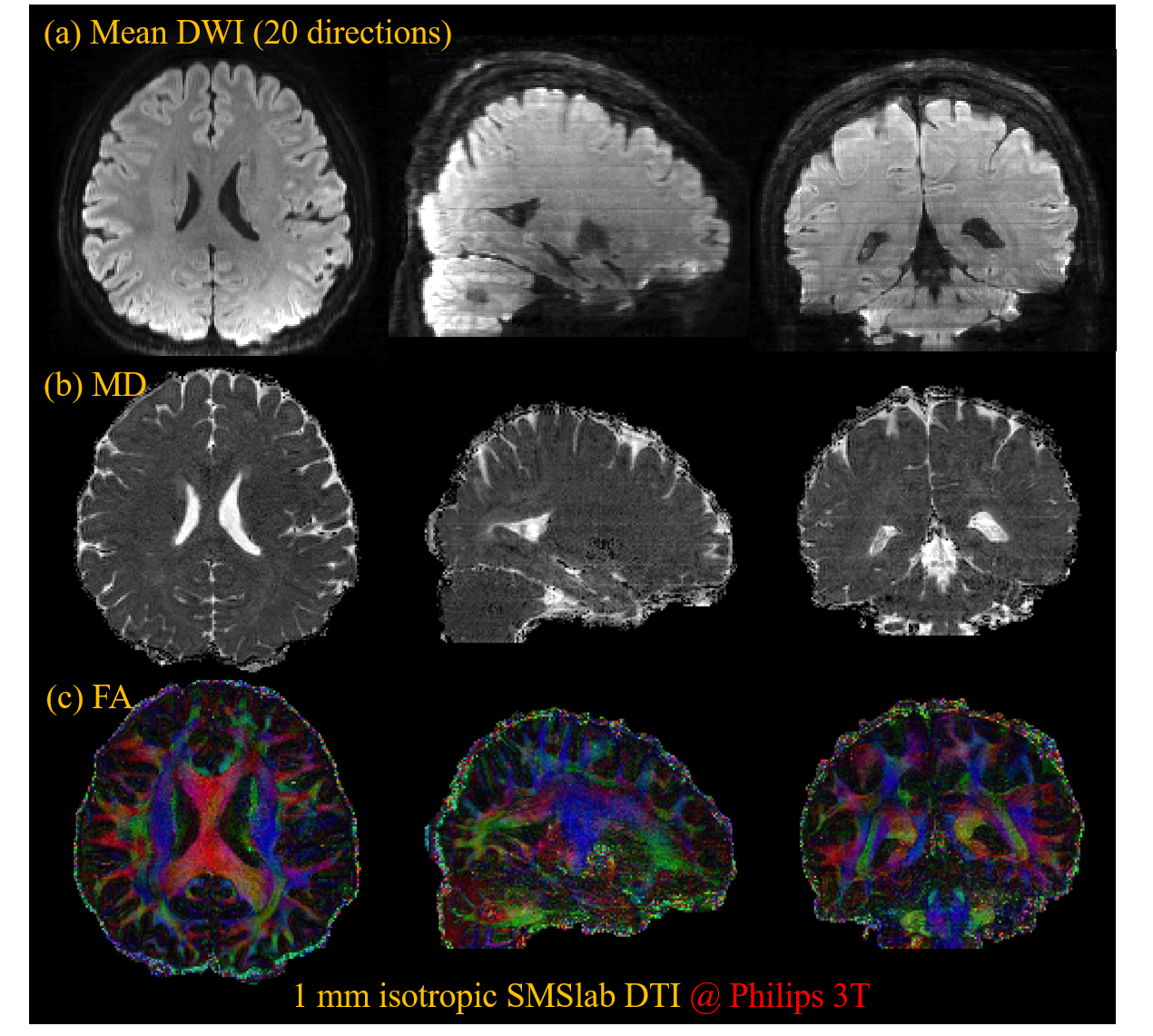
Figure 3 shows the reconstructed single-direction diffusion images from two volunteers, using three different reconstruction methods: k-space-based reconstruction with (a) the 2D navigator, (b) the synthesized 3D navigator and (c) the acquired 3D navigator (only for multi-slab). The central slice of one slab is displayed. As shown, with a 2D navigator, multi-slab can be generally corrected, but with a bit higher noise level, while SMSlab is still contaminated with residual artifacts (yellow arrows). Both multi-slab and SMSlab can be well recovered with the synthesized 3D navigator. For multi-slab, the image quality from the synthesized and acquired 3D navigator is consistent and compatible. This implies that a synthesized 3D navigator is a satisfactory alternative for slabs which are not too thick (10~20 mm), when an acquired 3D navigator is not available, as is the case in SMSlab.Figure 4 shows the 1 mm isotropic mean DWI images, MD and FA maps of SMSlab DTI with 20 diffusion directions, by k-space-based reconstruction with a synthesized 3D navigator, from three orthogonal views. For the residual banding artifacts on mean DWI images from sagittal and coronal views, the deep learning based method may have the potential to solve the problem better 10.
The navigator comparison results show that synthesizing a 3D navigator is crucial for SMSlab. First, with k-space-based reconstruction, a 3D navigator allows the weighting matrix to be calculated from a more flexible kernel size. Second, even the minor coil sensitivity variation through each slab is encompassed in the synthesized 3D navigator, which will improve the un-folding performance of thin slices from each slab.
Conclusion
Using the k-space-based reconstruction, the synthesized 3D navigator has similar performance with the acquired 3D navigator for multi-slab and outperforms the 2D navigator for both multi-slab and SMSlab.Acknowledgements
No acknowledgement found.References
1. Frost R, Miller KL, Tijssen RH, Porter DA, Jezzard P. 3D multi-slab diffusion-weighted readout-segmented EPI with real-time cardiac-reordered K-space acquisition. Magn Reson Med 2014;72(6):1565-1579.
2. Wu W, Koopmans PJ, Frost R, Miller KL. Reducing slab boundary artifacts in three-dimensional multislab diffusion MRI using nonlinear inversion for slab profile encoding (NPEN). Magn Reson Med 2016;76(4):1183-1195.
3. Wu W, Poser BA, Douaud G, et al. High-resolution diffusion MRI at 7T using a three-dimensional multi-slab acquisition. NeuroImage 2016;143:1-14.
4. Dai E, Wu Y, Guo H. High-Resolution Isotropic Diffusion MRI Using Simultaneous Multi-slab (SMSlab) Acquisition. In Proceedings of the 27th Annual Meeting of ISMRM. Montreal, Canada, 2019. p. 0774.
5. Dai E, Wu Y, Wu W, et al. A 3D k-space Fourier encoding and reconstruction framework for simultaneous multi-slab acquisition. Magn Reson Med 2019;82(3):1012-1024.
6. Bruce IP, Chang HC, Petty C, Chen NK, Song AW. 3D-MB-MUSE: A robust 3D multi-slab, multi-band and multi-shot reconstruction approach for ultrahigh resolution diffusion MRI. Neuroimage 2017;159:46.
7. Ma X, Zhang Z, Dai E, Guo H. Improved multi-shot diffusion imaging using GRAPPA with a compact kernel. Neuroimage 2016;138:88-99.
8. Liu S, Dai E, Guo H. SNR-Enhanced High-Resolution Diffusion Imaging Using 3D Simultaneous Multi-Slab (SMSlab) with Root-flipped RF Pulse Design. In Proceedings of the 28th Annual Meeting of ISMRM. Virtual meeting, 2020. p. 0968.
9. Dai E, Ma X, Zhang Z, et al. A POCS-Enhanced k-Space Reconstruction for 3D Multi-Slab Diffusion Imaging. In Proceedings of the 25th Annual Meeting of ISMRM. Paris, France, 2018. p. 5338.
10. Zhang J, Liu S, Wu Y, Guo H. Rapid Boundary Artifacts Correction for Simultaneous Multi-slab (SMSlab) Acquisition Using Convolutional Network. In Proceedings of the 28th Annual Meeting of ISMRM. Virtual meeting, 2020. p. 0985.
Figures