0674
Markerless optical head tracking system using facial features1Medical Products Technology Development Center, R&D Headquarters, Canon Inc., Tokyo, Japan, 2Advanced MRI Development PJ Team, Canon Medical Systems Corp., Kanagawa, Japan
Synopsis
We have developed a markerless tracking system enabling to estimate head pose through limited apertures of a head coil. The system, composed of a mirror and four MR compatible cameras, tracks the patient's facial features. The patient’s face image through the head coil’s apertures is monitored during scanning. To demonstrate its feasibility for tracking, a volunteer was moving his head arbitrarily inside a scanner. Despite the limited apertures of the head coil, the facial features were successfully tracked.
Introduction
Magnetic Resonance Imaging (MRI) is one of important modalities with a certain drawback. Since the MRI scan time is long, the patient in the MRI scanner must remain for several minutes to avoid reducing image quality caused by patient motion. Dealing with the human head imaging, one solution is to track the patient’s head motion in real time and adjust the magnetic gradient and RF fields during scanning so that the imaging volume follows the observed head motion.1 Among the available motion tracking methods, optical methods have often been used due to their flexibilities against pulse-sequences and the potential for very high accuracy.2 However, most optical motion tracking systems available involve the rigid attachment of markers to the patient’s head, may cause an additional workflow and discomfort for patients. Therefore, markerless optical motion tracking is desired to reduce the burden on patients.3 In addition, small apertures of head coil limit image recording for the optical methods, so a system design suitable for the small apertures is needed.Methods
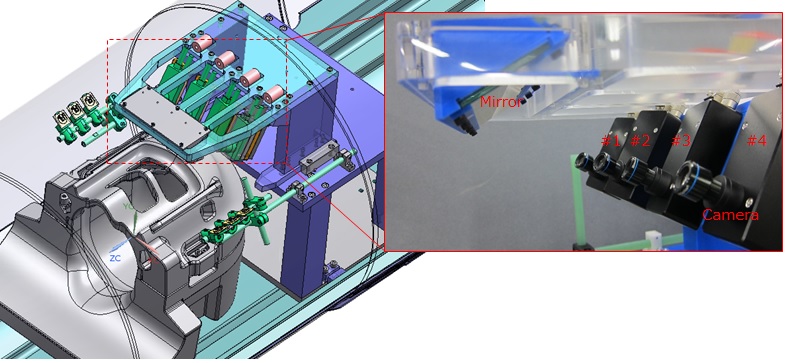
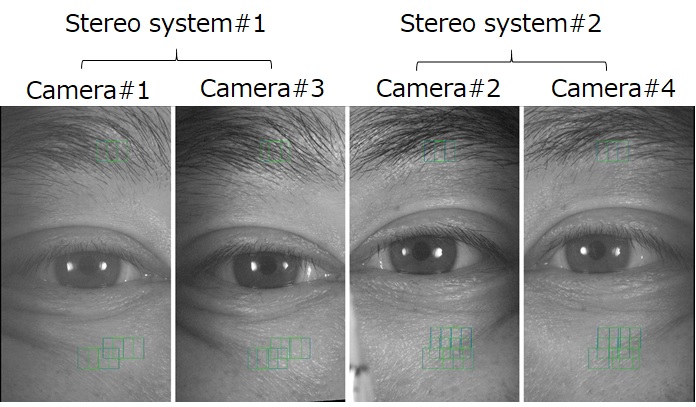
Figure 1 shows the markerless optical motion tracking system that comprises a computer (not shown), a mirror, four MR-compatible cameras (two sets of stereo camera system) with a 25 mm focal length lens and six white LEDs. The patient's face in a 64ch head coil (Canon Medical Systems) with excessively limited apertures is imaged through the mirror by the cameras fixed on a holder behind the head coil, as shown in Fig.1. The cameras consist of a CMOS image sensor with a resolution of 1440 x 1080 pixels and a maximum frame rate of 72Hz. Two sets of the stereo camera system that record a different region, have a physical separation of approximately 13cm and subtend an angle of approximately 24deg. The 25mm focal length lenses with f#8 supports working distance of 26-31cm at the allowable focus. This setup makes the camera’s field of view around the patient's both eyes within the limited apertures of the 64ch head coil.Figure 2 shows the images acquired by the two sets of the stereo camera systems. The systems track multiple image patches (green squares) including the facial features such as skin textures and eyebrows. Three-dimensional positions of these patches are estimated by a stereoscopic method, and the patient's head motion in 6 degrees of freedom is computed based on the positions at each frame without a marker.
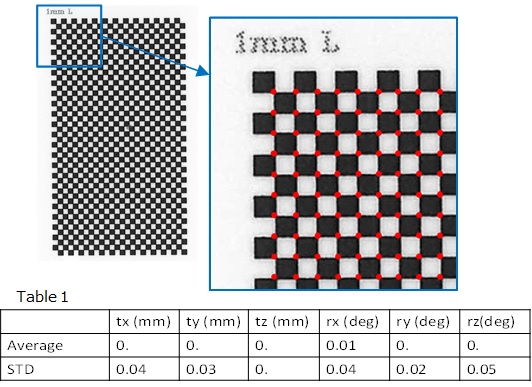
To evaluate errors caused by feature extraction, a simulation study using a test target with a checkerboard pattern (Fig.3) is conducted. In the study, the test target, whose pose is virtually changed to become one of grand-truth poses, is projected to images captured by four cameras, and the pose is estimated based on feature points (red points) extracted from the four camera images. After 1000 trials, differences between the estimated and grand-truth pose are evaluated as the errors.
Results and Discussion
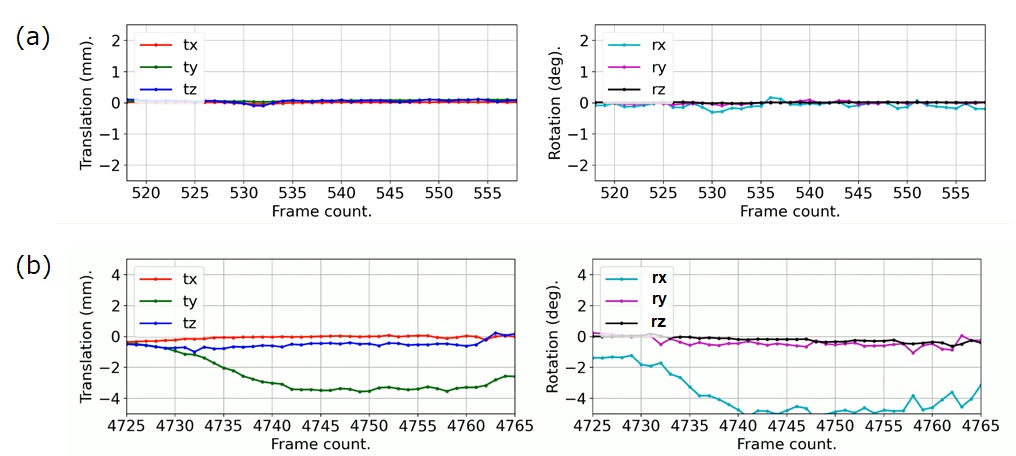
Table 1 shows an average and standard deviation (STD) of differences between poses estimated by the simulation and grand-truth poses. The symbols of tx, ty, tz, rx, ry, rz are translational and rotational parameters. All average values were almost zero, and all STD values were equal to or smaller than 0.05mm for translation and 0.05deg for rotation.To demonstrate its feasibility for tracking, a volunteer moved his head arbitrarily inside a Vantage Galan 3T scanner (Canon Medical Systems), as shown in Figure 4, and the head pose was computed offline relative to the first frame. Figure 5 shows the head motion estimated from the images acquired at a sampling rate of 50 Hz when the volunteer was moving his head according to instructions. The STD values of the estimated translational and rotational motion without the deliberate head movement in Fig.5 (a) were 0.27mm and 0.29deg, respectively. This variation is mainly due to blinking. The STD values of translation and rotation motion for the deliberate head movement, e.g. plots in Fig.5 (b), were 1.19mm and 2.59deg, respectively. Because motion curves corresponding to head motion direction in Fig.5 (b) are relatively smooth, it can be considered that the facial features such as skin textures and eyebrows are well tracked despite the limited apertures of the head coil.
However, pose estimation are currently computed offline due to no optimization of the computational efficiency. By rewritten from python to C++ codes for parallel computing, we believe that latency less than 20msec would be achievable.
Conclusion
We have developed the stereoscopic tracking system, which can provide head pose estimates without a marker attached on the head. Our markerless optical tracking system works with the excessively limited view of the head coil and has great potential for very high accuracy. Furthermore, it does not cause an additional workflow and discomfort to the patient.Acknowledgements
No acknowledgement found.References
1. J. Maclaren, M. Herbst, O. Speck, and M. Zaitsev, Prospective motion correction in brain imaging: a review. Magnetic Resonance in Medicine 69, Vol.3 (2013), 621-636.
2.M. Zaitsev, B. S. Armstrong, B. Andrews-Shigaki, T. P. Kusik, R. T. Barrows, K. Gumus, I. Y. Kadashevich, T. Prieto, O. Speck, and T. M. Ernst, Prospective Motion Correction for MRI with a Single Retro-Grate Reflector Target and a Single Camera. Proc. Intl. Soc. Mag. Reson. Med. 18 (2010).
3. C. Benjaminsen, R. R. Jensen, P. Wighton, M. D. Tisdall, H. H. Johannesen, Ian Law, Andre J. W. van der Kouwe, and O. V. Olesen, Real Time MRI Motion Correction with Markerless Tracking. Proc. Intl. Soc. Mag. Reson. Med. 24 (2016).
Figures