4343
Segmented Diffusion Imaging with Iterative Motion Corrected Reconstruction for Self-navigated Brain Echo-planar Imaging at 7T1Institute for Signal Processing, University of Luebeck, Luebeck, Germany, 2Department of Radiology, LUMC, Leiden, Netherlands, 3Philips Research Europe, Hamburg, Germany
Synopsis
Segmented diffusion imaging with iterative motion corrected reconstruction (SEDIMENT) is studied at 7T for self-navigated multi-shot DWI reconstruction including rigid in-plane motion correction. Motion-corrupted datasets contain intra-shot motion corrupted data with imperfect diffusion-sensitizing gradient reversal, which have to be identified and removed. The iterative SEDIMENT framework is evaluated in-vivo in conjunction with tailored data rejection strategies to detect corrupted shot datasets and generally improve convergence. The proposed algorithm provides high-quality multi-shot DWI and DTI reconstructions in the presence of gross motion allowing for efficient navigator-free DWI acquisition schemes.
Introduction
Multi-shot diffusion imaging offers higher resolution and SNR compared to single-shot echo-planar imaging (EPI), which is the current clinical standard1. However, diffusion sequences are extremely motion-sensitive, which makes segmented acquisitions vulnerable to shot-specific physiological motion2 and inter-shot gross motion3. Several SENSE4,5-based algorithms like SENSE+CG6 and POCS-ICE7 have been developed to overcome the problem of physiological motion by phase-corrected reconstructions. AMUSE3 covers rigid motion correction in a non-iterative fashion, which proved insufficient for high segmentations8. This work investigates an iterative multi-shot DWI framework including rigid in-plane motion and shot phase corrections for self-navigated reconstruction of 7T data: this high field is particularly sensitive to motion-induced artifacts. Two data rejection schemes are integrated to improve convergence and robustness against motion-corrupted diffusion shot data.Theory
The multi-shot DWI problem3,8 including physiological and gross motion can be expressed as a nonconvex optimization for the rigid shot motion operators $$$\Omega_i$$$, the phase operators $$$\Phi_i$$$ and the joint image $$$\mathbf{\rho}$$$:$$\mathrm{minimize} \; \dfrac{1}{2} \sum_{i \in I} \lVert F_i S \, \mathbf{x}_i - \mathbf{d}_i \rVert_2^2, \quad \mathrm{s.t.} \; \mathbf{x}_i=\Omega_i\Phi_i \, \mathbf{\rho}$$
where the objective is the sum of the individual shot data consistency terms while the constraint corresponds to a shot model that relates all shots to a joint image $$$\mathbf{\rho}$$$. $$$F_i$$$ is the Fourier operator of shot $$$i$$$, $$$S$$$ is the sensitivity operator, $$$I$$$ is the set of included shots and $$$\mathbf{x}_i$$$ and $$$\mathbf{d}_i$$$ and are the shot image and the shot data, respectively.
Algorithms
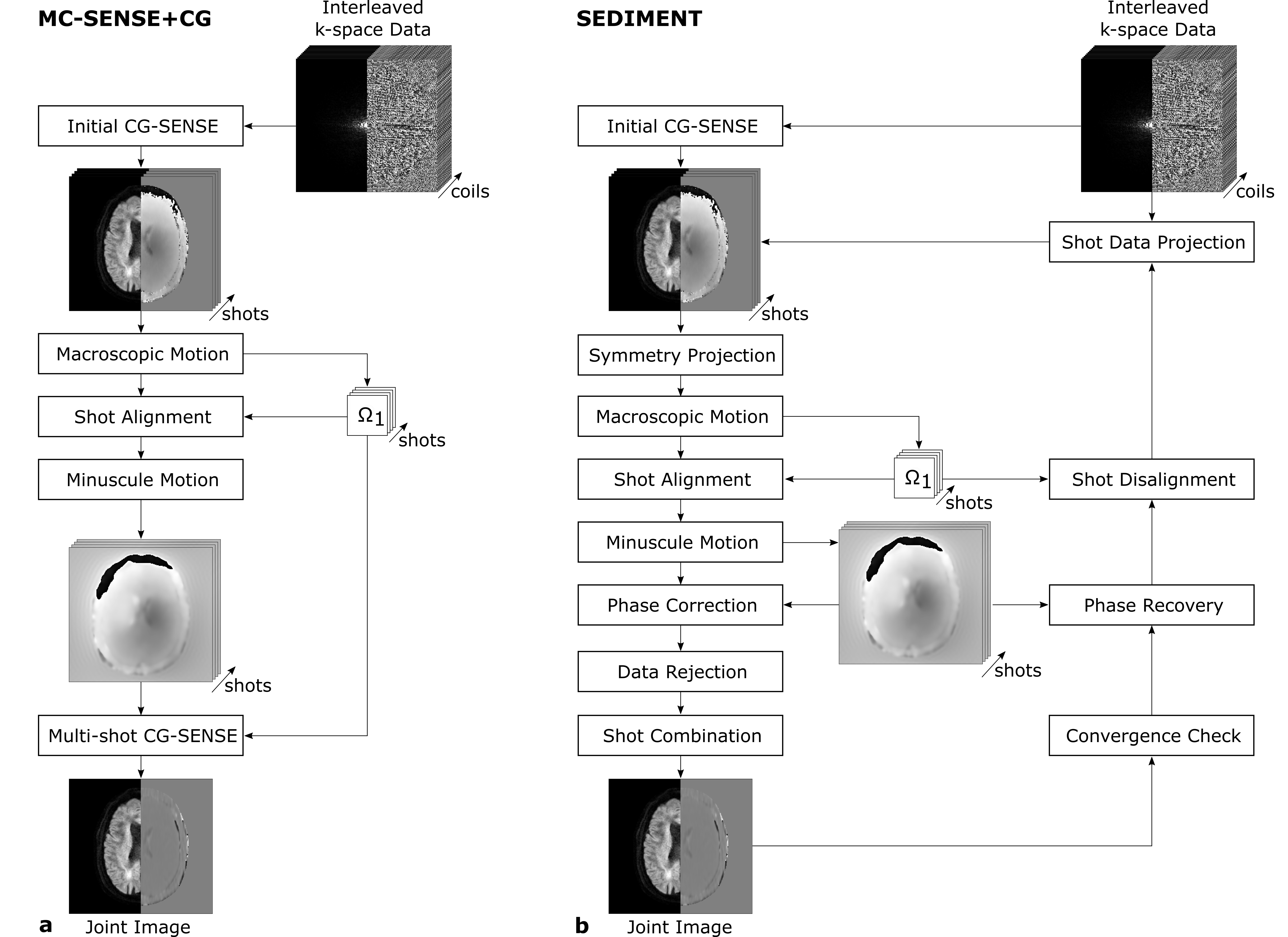
The proposed method, called SEDIMENT, iteratively performs shot image, shot parameter and joint image updates to solve the multi-shot problem. The shot images are initialized via CG-SENSE5. The shot images $$$\mathbf{x}_i$$$ are then employed to determine the inter-shot in-plane motion by rigid registration, the smooth phase variations by k-space windowing7 and the shot rejection criteria. The motion-corrected shots $$$\mathbf{\rho}_i=\Omega_i^H\Phi_i^H \, \mathbf{x}_i$$$ are then averaged, followed by a shot data projection.7 For partial Fourier acquisitions, the shot phase content is constrained to the assumed resolution by a phase projection9,10 after each shot update.The reference algorithm, called motion-corrected SENSE+CG6 (MC-SENSE+CG), is a non-iterative algorithm similar to AMUSE3, which solves the extended SENSE problem after the first shot parameter estimation using CG. Partial Fourier is included by homodyne reconstruction. Image registration was performed using a normalized gradient field metric11. The phase was filtered by a triangular k-space window with full-width half the matrix size7. SEDIMENT was stopped when 200 iterations were reached or when the residual error7 of subsequent iterations fell below 10-6.
Methods
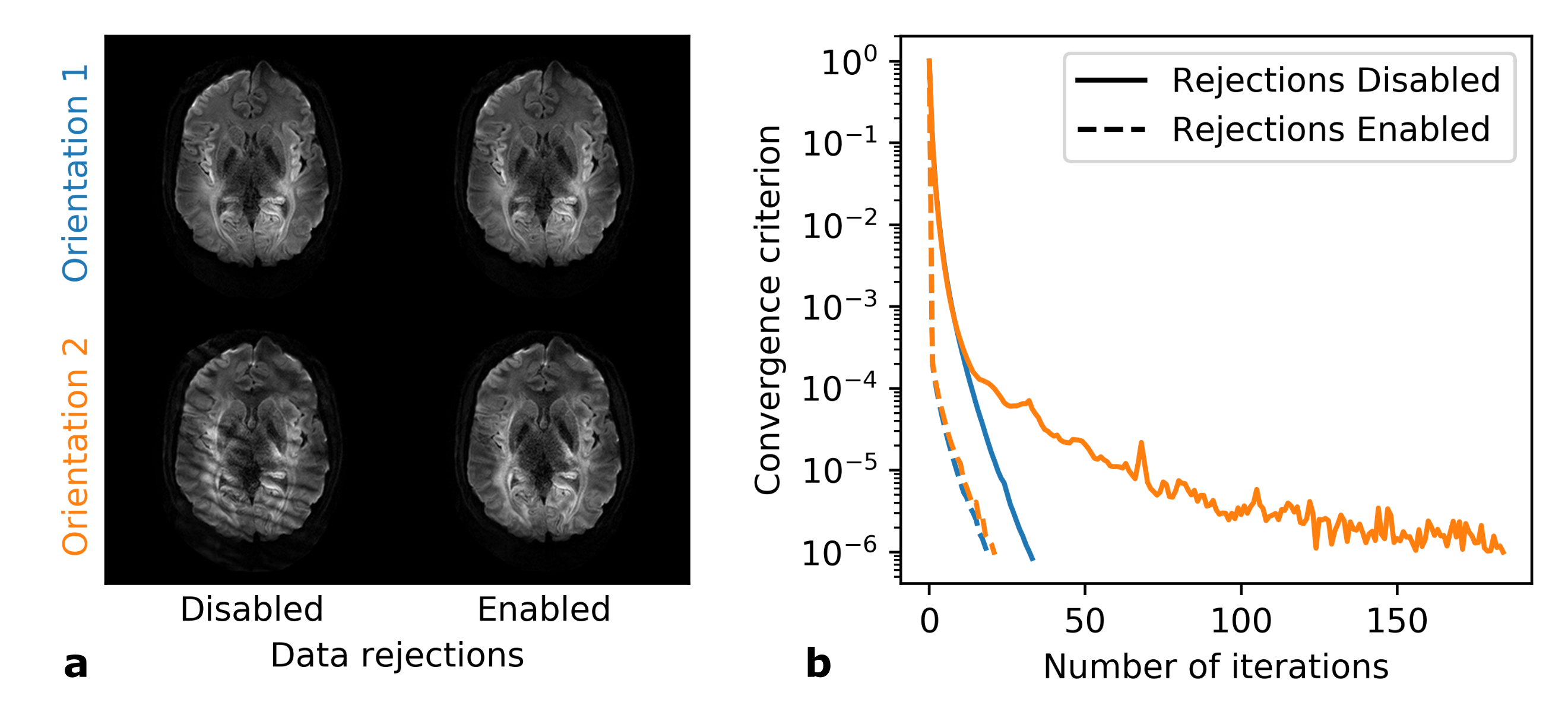
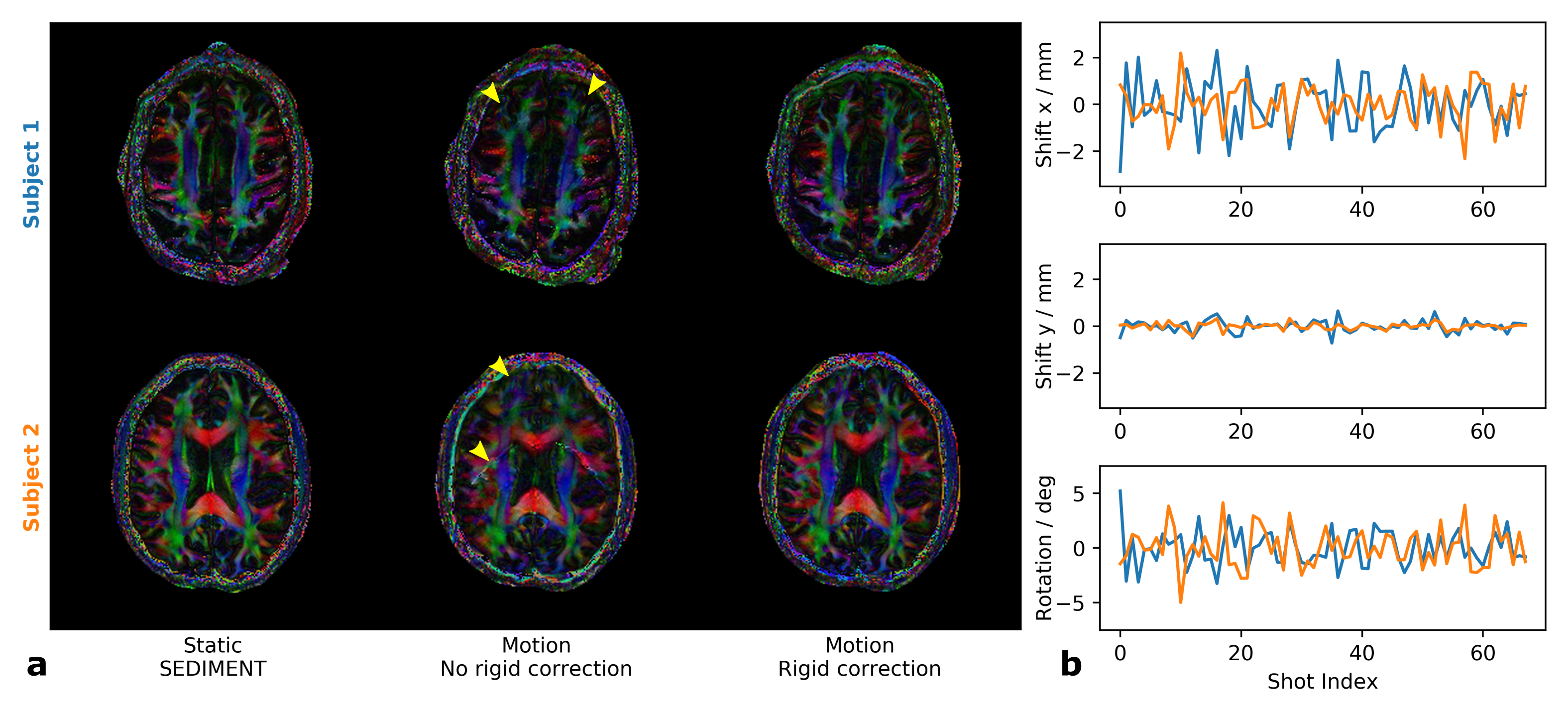
To improve the overall robustness, the algorithms are equipped with two data rejection strategies. First, the distance of the motion-corrected shots is evaluated with respect to a reference shot before shot combination: $$$r_1(\mathbf{\rho}_i) = \lVert \mathbf{\rho}_i - \mathbf{\rho}_{i_{ref}} \rVert_2 / \lVert \mathbf{\rho}_{i_{ref}} \rVert_2$$$, where $$$i_{ref}$$$ is chosen as the highest correlation to all other shots. The second shot rejection addresses the problem of intra-shot motion during diffusion encoding. Rigid motion between the diffusion-sensitizing gradients spoils the gradient reversal leading to residual phases of zeroth and first order. The latter corresponds to linear phases in image space, which might interfere with the smoothness filtering if the phase ramp becomes too steep. This is prevented by rejecting shot images whose k-space peak distance from the origin $$$\mathbf{k}_i^{max}(\mathbf{x}_i)$$$ exceeds a threshold: $$$r_2(\mathbf{x}_i)=\lVert \mathbf{k}_i^{max}(\mathbf{x}_i) \rVert_2$$$. Shots were rejected if $$$r_1>0.5$$$ or $$$r_2>5\Delta k$$$.Segmented diffusion EPI data was obtained from 5 healthy volunteers on a 7T Philips scanner using a 32-channel head coil. Informed consent was attained according to the rules of the institution. DWI data was acquired with {4, 5, 7} shots, b = {0, 1000} s/mm2 in three orthogonal directions and 1x1x4 mm3 resolution. Additionally, 4-shot DTI data was acquired with an equal protocol capturing 15 diffusion directions. The DTI experiments were performed twice, first the subjects were asked to remain still and second to perform continuous in-plane motion during the scan.
Results
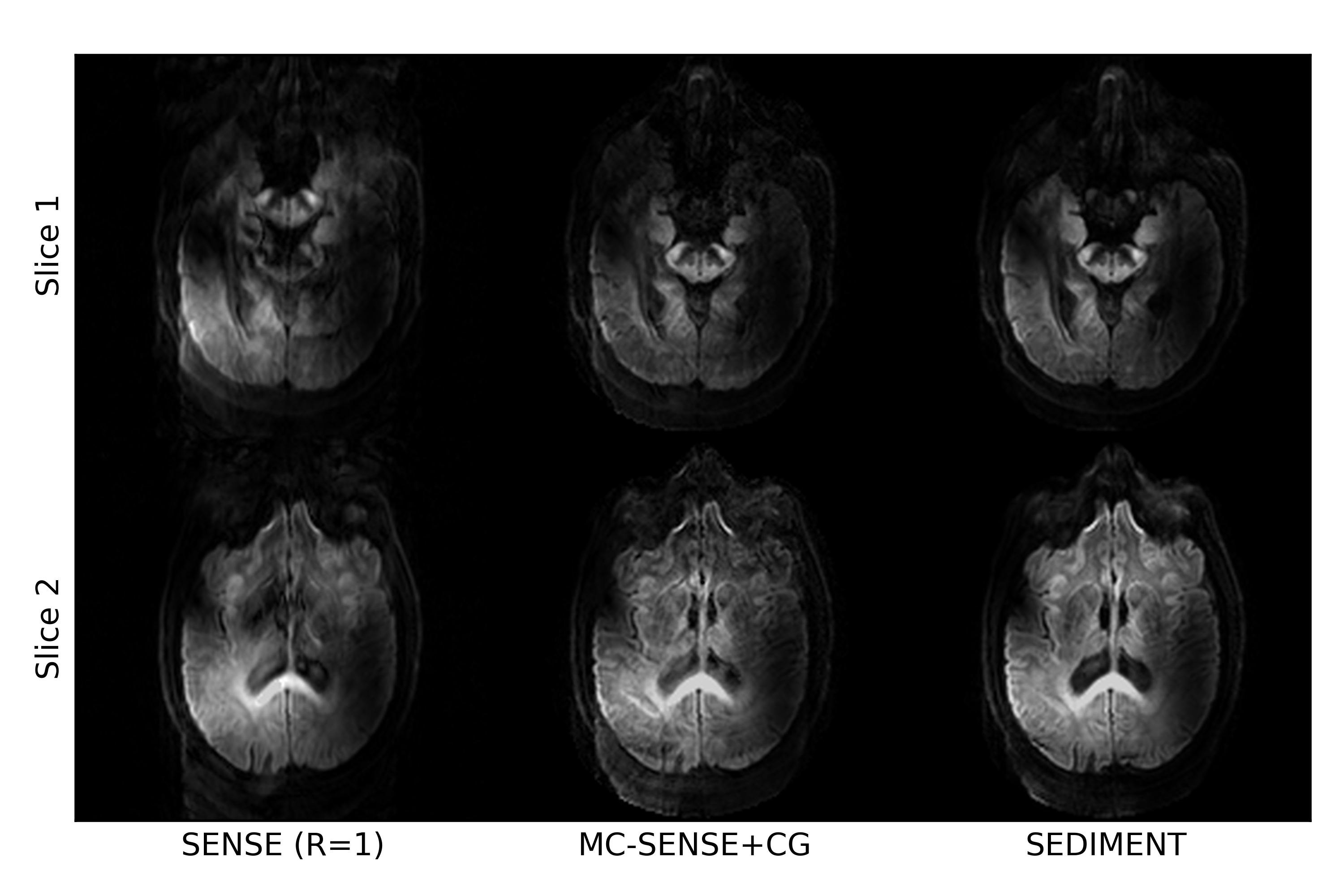
The SEDIMENT reconstructions are compared to the non-iterative MC-SENSE+CG in Fig. 2 for 7-shot data. Figure 3 shows the artifacts in multi-shot DWI caused by intra-shot motion during the diffusion encoding. The impact of the rejection strategies on the convergence is also shown. For this DTI dataset, SEDIMENT reconstructions took on average 33 iterations in 19.72 s, while MC-SENSE+CG needed 10.24 s. Figure 4 shows fractional anisotropy (FA) maps for static and gross motion-corrupted datasets. The FA maps were calculated using Dipy12 after affine alignment of the individual multi-shot reconstructions.Discussion
The iterative SEDIMENT algorithm provides superior image quality for multi-shot diffusion reconstructions, especially for high segmentation factors without any phase navigator information13 (Fig. 2). The high SNR of the 7T scanner and the 32-channel array improve general conditioning, but, nevertheless, iterative reconstructions prove beneficial for segmentations exceeding four shots7,8. Both shot-rejection criteria successfully support convergence speed. Furthermore, the shot rejection by k-space peak offsets is capable of detecting adverse shot datasets comprising motion-corrupted diffusion encoding.Conclusion
SEDIMENT provides an effective framework for self-navigated multi-shot reconstructions at 7T. Two shot-rejection criteria based on shot-wise k-space peak offsets and shot-similarity proved beneficial to detect motion-corrupted diffusion encodings and improve overall convergence.Acknowledgements
No acknowledgement found.References
1. Wu W and Miller KL. Image formation in diffusion MRI: A review of recent technical developments: Review of Image Formation in dMRI. JMRI. 2017;46(3):646–662.
2. Miller KL and Pauly JM. Nonlinear Phase Correction for Navigated Diffusion Imaging. MRM. 2003;50:343-353.
3. Guhaniyogi et al. Motion Immune Diffusion Imaging Using Augmented MUSE for High-Resolution Multi-Shot EPI. MRM. 2016;75:639-652.
4. Pruessmann et al. SENSE: sensitivity encoding for fast MRI. MRM. vol. 1999;42(5):952–962.
5. Pruessmann et al. Advances in sensitivity encoding with arbitrary k‐space trajectories. MRM. 2001;46(4):638-651.
6. Truong TK, and Guidon A. High‐resolution multishot spiral diffusion tensor imaging with inherent correction of motion‐induced phase errors. MRM. 2014;71(2):790-796.
7. Guo et al. POCS‐enhanced inherent correction of motion‐induced phase errors (POCS‐ICE) for high‐resolution multishot diffusion MRI. MRM. 2016;75(1):169-180.
8. Steinhoff M, Nehrke K, Mertins A, Börnert P. Multi-shot Diffusion EPI Reconstruction with Iterative Rigid Motion-correction and Motion-induced Phase-correction for Brain Imaging. In: Proceedings of the 27th Joint Annual Meeting of ISMRM. Montréal, QC, Canada; 2019.
9. Samsonov AA, Kholmovski EG, Parker DL, and Johnson CR. POCSENSE: POCS-based reconstruction for sensitivity encoded magnetic resonance imaging. MRM. 2004;52(6):1397–1406.
10. Steinhoff M, Nehrke K, Mertins A, Börnert P. Self-navigated Half-Fourier Multi-shot Echo-planar DWI Reconstructions for Brain Imaging. In: Proceedings of the 27th Joint Annual Meeting of ISMRM. Montréal, QC, Canada; 2019.
11. Kabus S and Lorenz C. Fast elastic image registration. Medical Image Analysis for the Clinic: A Grand Challenge. 2010:81-89.
12. Garyfallidis E, Brett M, Amirbekian B, et al. Dipy, a library for the analysis of diffusion MRI data. Frontiers in neuroinformatics. 2014;8:8.
13. Jeong H-K, Gore JC, Anderson AW. High-resolution human diffusion tensor imaging using 2-D navigated multishot SENSE EPI at 7 T. MRM. 2013;69(3):793-802.
Figures