4271
4D Deformable Digital Phantom for MRI Sequence Development1University of Manchester, Manchester, United Kingdom, 2The Christie NHS Trust, Manchester, United Kingdom
Synopsis
We present a digital phantom intended for MR-guided radiotherapy imaging sequence design and testing. The framework uses existing phantom generating software to provide the anatomical shape and movement, while the MRI simulation is handled by a modified version of a Bloch simulator. The accuracy of the phantom framework was demonstrated by simulating a 4D image of a single respiratory cycle and also by reproducing motion-related artefacts in a 2D image.
Introduction
Bloch simulators are an important tool in MR development. Optimizing MRI sequences while scanning patients is difficult as they are not reproducible nor offer the ground truth. Physical phantoms are available for MRI testing, but lack the complex deformational movements and anatomical structure of the human body. A deformable digital phantom combines ground truth with the potential for complex movement. Bloch simulation has the advantage of being very realistic while being able to disable certain phenomenon to understand its impact on the image. Therefore there is a need for a digital phantom for MR simulation, that is realistic, anatomically accurate, and allows deformable motion. In this project, we describe the creation of a new digital phantom framework combining the Extended Cardiac Torso Phantom1 (XCAT) digital human model with a version of the JEMRIS2 Bloch simulator modified to support deformable motion.Methods
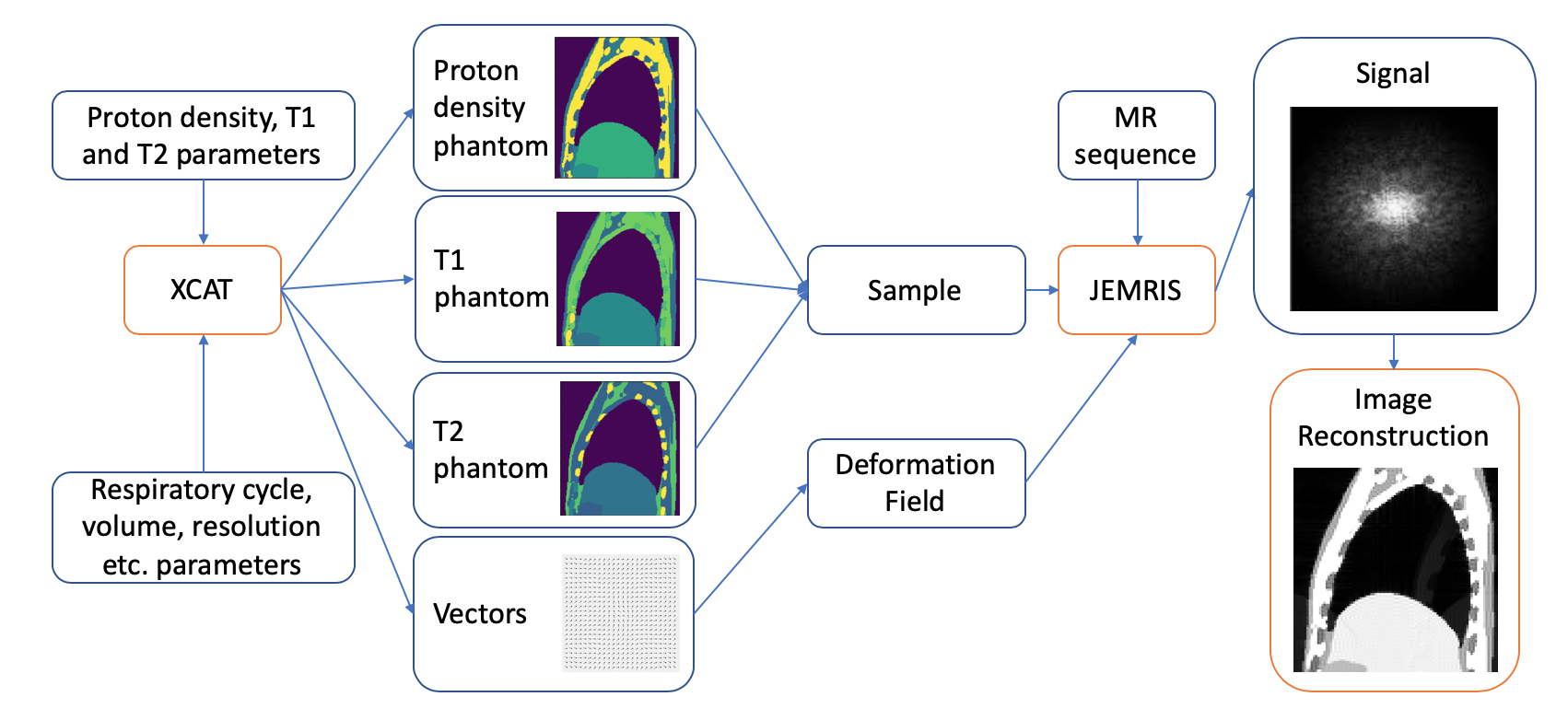
The framework (Figure 1) uses the XCAT software to generate the phantom structure. T1,T2 and proton density for each tissue values were taken from Paganelli et al 3 and the MRI Toolbox parameter database4. Parameters related to respiratory cycle, volume selection, resolution etc. are added. Deformation vector fields are next calculated using XCAT. From the output a JEMRIS sample file is created. Currently the model lacks distortions in B0, and T2 values are also used for T2*.We have modified JEMRIS to support independent motion of all spins. The simulator loads a deformation field grid at the start of each simulation and then uses linear interpolation to find the deformation vector for each spin as a function of time. This modified position is then used by the simulator to calculate gradient strengths, coil sensitivities etc. allowing the simulator to demonstrate behaviors such as motion ghosts or the excitation history effect5.
In order to demonstrate the capabilities of the framework, two acquisitions were simulated. A 2D sagittal slice phantom through the lung (320 x 360 pixels of 0.75x0.75mm2) was created, together with a 10 phase/5 second respiratory deformation field. The two MR sequences tested were: a single-shot EPI sequence (TR=100ms) to create a cine sequence of one respiratory cycle and a spin echo sequence (TR=2500ms) test the creation of motion ghosting. A partial Fourier acquisition (65% asymmetric coverage) was used to reduce the acquisition time and achieve a high framerate with the EPI sequence.
Results
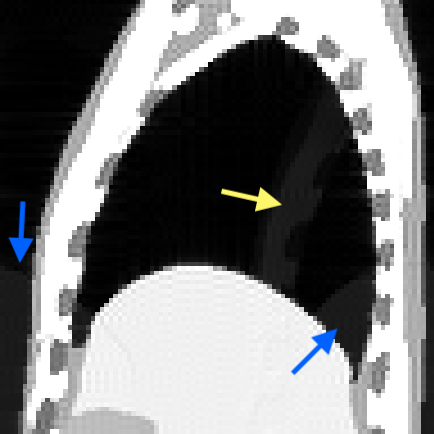
The cine sequence shows movement of the chest wall along the anterior-posterior axis and movement of the abdominal organs along the superior-inferior axis as expected. The partial Fourier introduced a reflection of the chest wall due to differences of T2* decay over the sampled and synthesized k-space.The simulation of the long TR sequence aimed to create conditions where motion artefacts are known to be present. TP was set to 2.5 sec (half of the respiratory cycle), to produce a single discrete ghost artifact, offset by exactly half the field of view. Figure 3 shows ghosts of both the diaphragm and chest wall (indicated by arrows), while there is no ghost of the stationary spine. This is expected, as the artefact only arises from mobile structures.
Discussion
We show feasibility of full Bloch simulation under deformable motion conditions. Two other XCAT-based MR simulation frameworks are presented in literature: MRXCAT6 and CoMBAT3. Both of them are based on empirical models. Our software is able to more accurately describe a wide range of MR phenomena. This means that features such as multiple echo pulses, selective excitation or non-linear gradients and any artefacts that may arise from them can be simulated.One drawback of this framework compared to the empirical models is the time required for Bloch simulations. On our test machine (running at 2.2GHz), the 2D TSE sequence took around 4 hours of computation time with 66,748 spins. However, JEMRIS supports parallel computation using MPI so by utilizing 40 cores for processing the actual wall time for simulation was around 6 minutes.
All computation for this study was done using a 2D plane of spins to reduce the computational burden, but this means that some behaviors are not accurately simulated, for example we lack through-plane motion or slice selective excitation. However, the framework also supports working with 3D samples providing these features. Currently object-induced distortions in B0 are not calculated in the framework, however this is a major source of image artefacts, particularly in lung imaging, and we therefore plan to incorporate B0 distortions into a future version of the framework.
In the example images we focused on the thoracic region and respiratory motion, however the framework also has capability of simulating heart movement and generating phantoms of any part of the body.
Conclusion
We present a deformable 4D digital phantom framework for MR sequence development. The performance of the framework is demonstrated through generating a lung model with respiratory motion and imaging the complete respiratory cycle with a cine sequence and demonstrating the expected motion ghosts from a T2 weighted spin echo acquisition.Acknowledgements
No acknowledgement found.References
1. Segars WP, Sturgeon G, Mendonca S, Grimes J, Tsui BMW. 4D XCAT phantom for multimodality imaging research. Medical Physics. John Wiley and Sons Ltd; 2010;37(9):4902–15.
2. Stöcker T, Vahedipour K, Pflugfelder D, Shah NJ. High-performance computing MRI simulations. Magnetic Resonance in Medicine. 2010;64(1):186–93.
3. Paganelli C, Summers P, Gianoli C, Bellomi M, Baroni G, Riboldi M. A tool for validating MRI-guided strategies: a digital breathing CT/MRI phantom of the abdominal site. Medical and Biological Engineering and Computing. Springer Berlin Heidelberg; 2017;55(11):2001–14.
4. McMillan A. MRI Toolbox - Parameter Database [Internet]. 2013. Available from: http://www.mritoolbox.com/ParameterDatabase.html
5. Zaitsev M, Akin B, LeVan P, Knowles BR. Prospective motion correction in functional MRI. NeuroImage [Internet]. Elsevier; 2017;154(November 2016):33–42. Available from: http://dx.doi.org/10.1016/j.neuroimage.2016.11.014
6. Wissmann L, Santelli C, Segars WP, Kozerke S. MRXCAT: Realistic numerical phantoms for cardiovascular magnetic resonance. Journal of Cardiovascular Magnetic Resonance. BioMed Central Ltd.; 2014 Aug;16(1).
Figures