3760
Repeatability of Magnetic Resonance Fingerprinting using ISMRM/NIST MRI Phantom in Philips 3T MRI Scanner1Diagnostic Radiology, The University of Hong Kong, Hong Kong, Hong Kong, 2The University of Hong Kong, Hong Kong, Hong Kong
Synopsis
The purpose of this study is to assess the repeatability of the magnetic resonance fingerprinting (MRF) sequence in a Philips 3T scanner with reference to the ISMRM/NIST MRI system phantom. The results showed a strong correlation between the T1 and T2 estimated from MRF versus the reference values (R2 = 0.999, and R2 = 0.981). A high level of repeatability was achieved over the 15 scanning sessions, although the T1 estimated from MRF has a significantly higher degree of repeatability than T2.
Introduction
Magnetic Resonance Fingerprinting (MRF) is a robust and efficient MR technique for the estimation of MR parameters, such as T1, T2 and proton density 1,2. That these MR parameters are quantitative and largely do not depend on MRI hardware and sequence configuration renders MRF an ideal technique for longitudinal studies, such as treatment effect on cancer patients. It is therefore imperative that the repeatability of MRF be evaluated. The purpose of this study is to assess the repeatability of MRF based on the inversion-recovery unbalanced steady-state (IR-FISP) sequence using the ISMRM/NIST MRI system phantom3.Methods
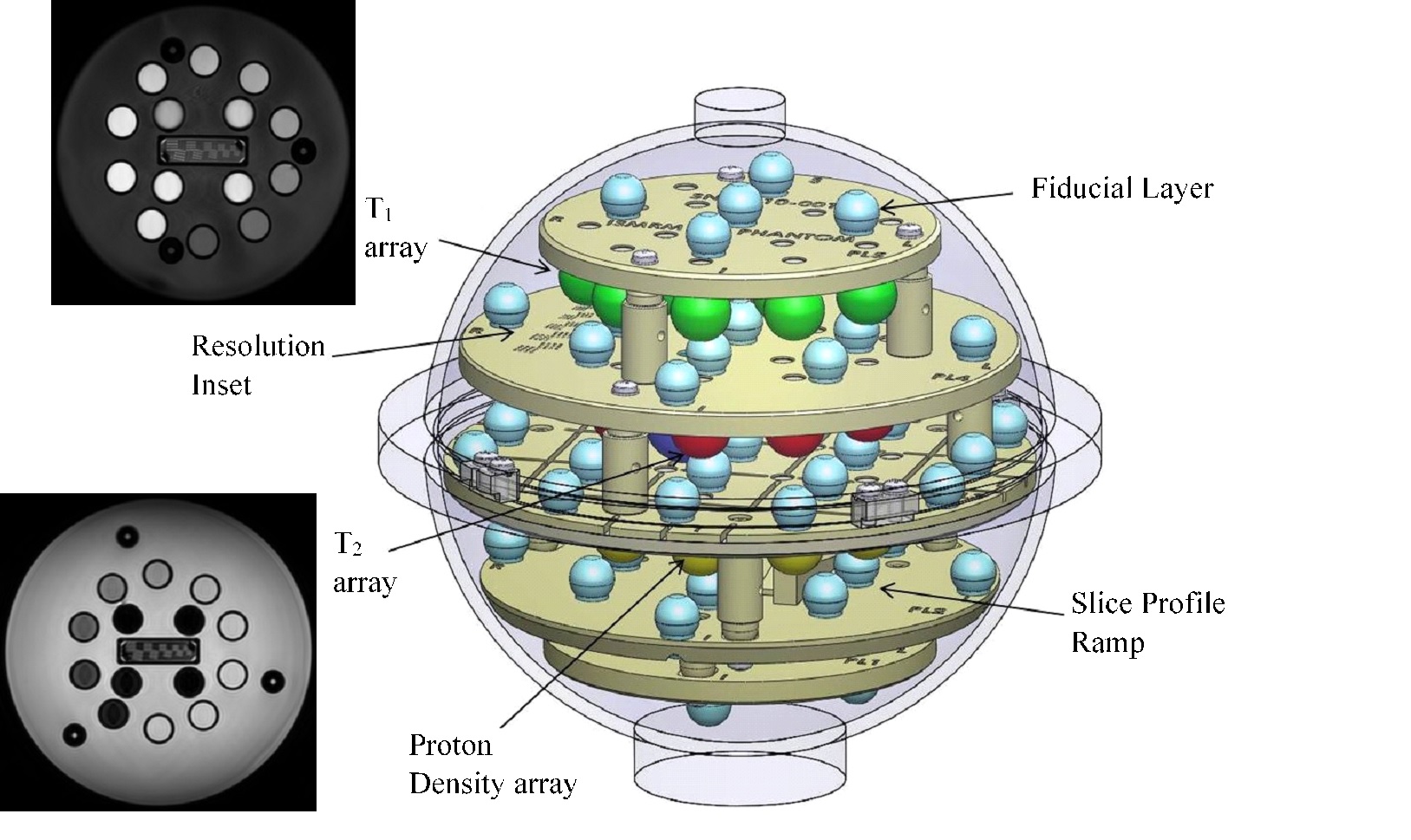
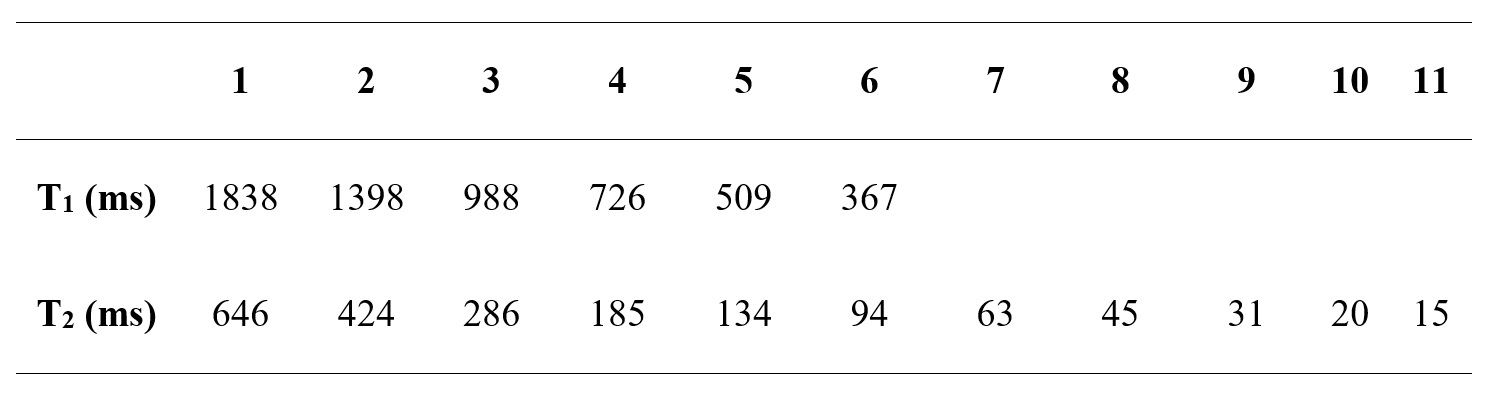
All MRI experiments were performed using a 3.0T human scanner (Achieve TX, Philips, Best, Netherland). The ISMRM/NIST MRI phantom (Fig 1) was used for this repeatability study. It contains fiducial spheres filled with well-characterized T1 and T2 relaxation times. The phantom was scanned using the IR-FISP MRF sequence over 15 sessions throughout 65 days. The IR-FISP MRF sequence with spiral-in-spiral-out readout trajectory (acceleration factor = 58.4) was developed in-house. Detailed imaging parameters were: TR = 8.5ms to 10.1ms, flip angles = 5° to 60°, matrix size = 256 x 256, field of view = 30 x 30 cm2, slice thickness = 5 mm, and 1000 dynamics per slice. An addition of a minimum 5 seconds delay was added before each acquisition to ensure the net magnetization to be in its thermal equilibrium state. The resulting scan time per slice was 55s. MRF was performed 5 different times in each session. MRF dictionary was generated using the extended phase graph algorithm using MATLAB (Mathworks Inc, Natick, MA). The dictionary contained T1 values ranging from 300 to 6000 ms in 15 ms increment and T2 values ranging from 10 to 6000 ms in 5 ms increment. Region-of-interest analysis of each fiducial sphere from all repetitions of each session was performed. In particular, the mean of each ROI on T1 and T2 maps were measured, and the median and standard deviation of the means amongst the 5 repetitions were recorded for all 15 sessions. Bland-Altman (B&A) analyses were performed to assess the agreement between the T1 and T2 estimated from MRF sequence and those provided by ISMRM-NIST (Table 1).Results
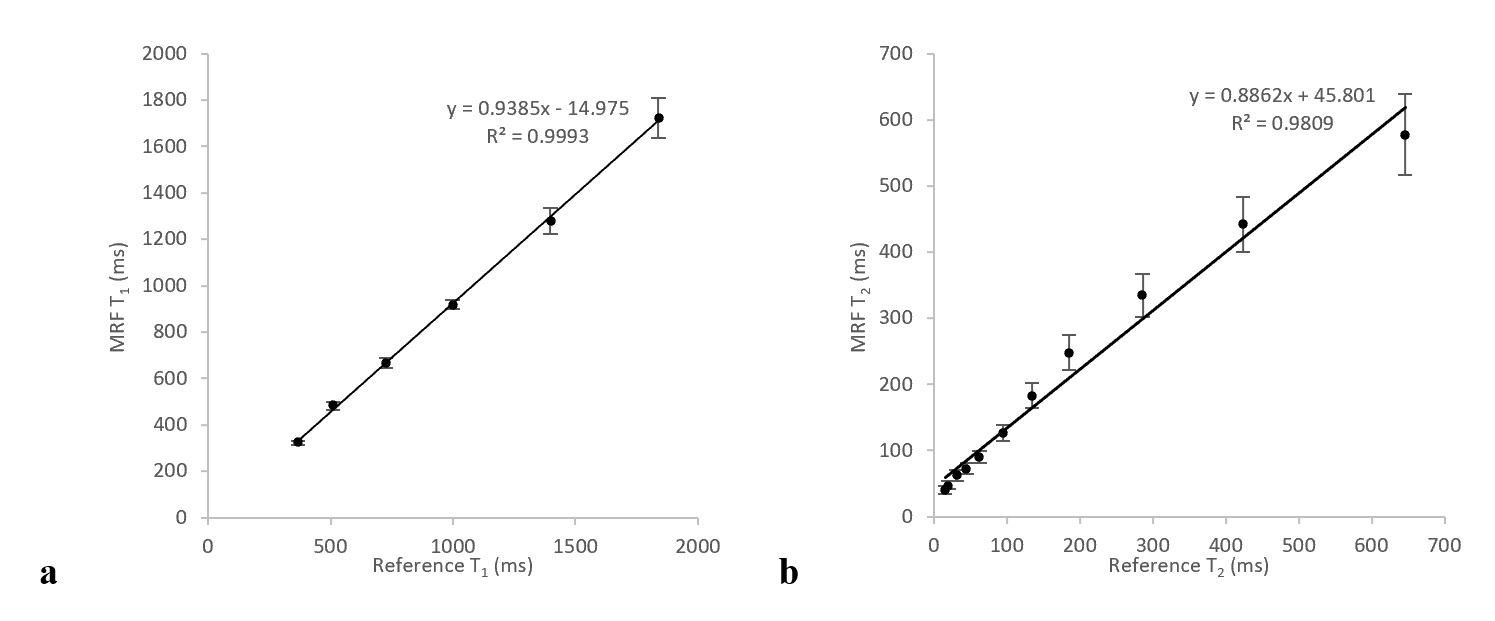
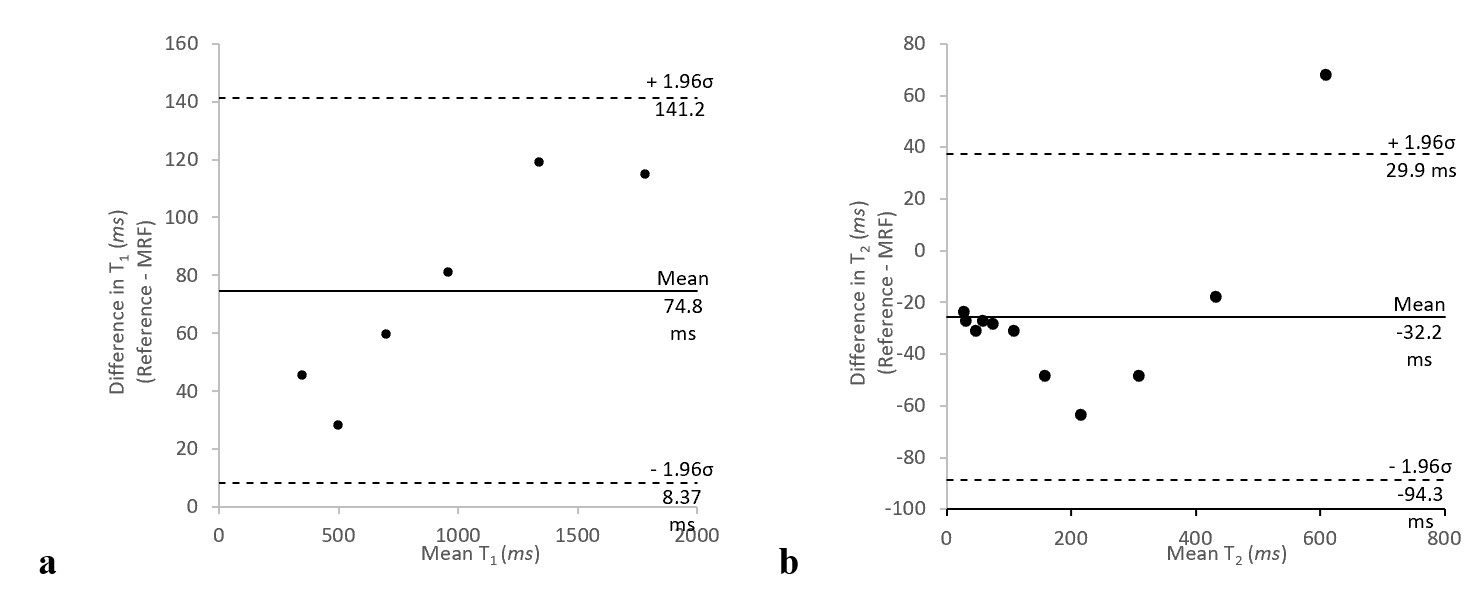
There was a strong correlation between the T1 and T2 estimated from MRF versus the reference values (R2 = 0.999, and R2 = 0.981, respectively; Fig 2). In Bland-Altman analysis, the T1 estimated from MRF has a bias of 74.8 ms, and the range of limit of agreement was between 8.37 and 141.2 ms (Fig 3a). All measurements were within the limits of agreement. The T2 estimated from MRF has a bias of -32.2 ms with range of limits of agreement between -94.3 and 29.9 ms (Figure 3b). There was a measurement that lied above the limit of agreement (sphere T2-1) with a difference of 67.9 ms shorter than the reference value.Conclusion
The MR parameters estimated from MRF display high repeatability over the 15 sessions. The T1 estimated from MRF has a significantly higher degree of repeatability than T2.Acknowledgements
NoneReferences
1. Ma D, Gulani V, Seiberlich N, Liu K, Sunshine JL, Duerk JL, et al. Magnetic resonance fingerprinting. Nature. 2013;495(7440):187-92.
2. Jiang Y, Ma D, Seiberlich N, Gulani V, Griswold MA. MR fingerprinting using fast imaging with steady-state precession (FISP) with spiral readout. Magnetic resonance in medicine : official journal of the Society of Magnetic Resonance in Medicine / Society of Magnetic Resonance in Medicine. 2015;74(6):1621-31.
3. Russek SE, Boss M, Jackson EF, Jennings DL, Evelhoch JL, Gunter JL, Sorensen AG. Characterization of NIST/ISMRM MRI system phantom. In Proceedings of the 20th Annual Meeting of ISMRM, Melbourne, Australia, 2012. Abstract 2456.
Figures