3698
Motion Robust Parallel Transmission Excitation Pulse Design for Ultra-High Field MRI1Cardiff University Brain Research Imaging Centre, Cardiff, United Kingdom
Synopsis
Within-scan patient motion hampers the performance of parallel-transmit (pTx) pulses. In this study we developed a motion-robust pTx pulse (MRP) in the small tip angle regime to improve magnitude homogeneity over a range of pitch/roll/yaw rotations from 0° to 5°. The 4-spoke MRP was compared to a 3-spoke conventionally designed pulse (CDP). The MRP produced more homogenous magnitude profiles than the CDP for all evaluated rotations (0°,1°,2°,5° around each axis). The benefit of the method was more prominent with increased rotation angles. The proposed design shows potential for excitation pulses that maintain highly homogeneous magnitude profiles during patient head motion.
Introduction
Parallel transmission of RF waveforms (PTx) using multiple transmit channels can greatly improve excitation homogeneity at ultra-high-field.1 pTx-pulses use patient-specific B1-maps for improving the flip-angle homogeneity, however the inherent position-specific nature of these maps leads to reduced pTx performance in the presence of patient motion.2 To address this motion sensitivity, we developed a motion robust pulse (MRP) for head rotation.Methods
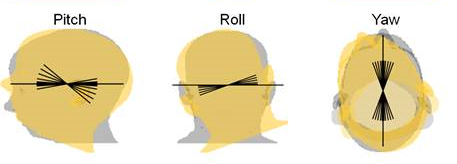
Virtual body model Ella3 was simulated inside a generic 8-channel parallel-transmit coil using Sim4Life (Zurich MedTech, Zurich, CH). Positions included a case with no rotation and on-axis pitch/roll/yaw rotations of 1°,2°,5° about the centre of the head, leading to 10 positions, as shown in Figure (1).2 The initial MRP was designed using simulated coil sensitivity maps (CSMs) for 0°,1°,2°,5° pitch/roll/yaw head rotations (10 total) . Similar to the concept of universal pulses4, which are designed for multiple B1-maps acquired from a cohort of participants, we design pulses for multiple positions. The MRP design combined multiple CSMs, each representing a patient position within the scanner. Pulse design was performed in patient coordinates by co-registering and concatenating all CSMs while positional differences were incorporated by adapting the gradient fields for each CSM. Small tip-angle, axial slice selective motion-robust spokes pulses were designed using an adaptation of the phase-relaxed spatial domain method.5 The cost function consists of the error in magnitude-wise excitation profiles evaluated at multiple positions and RF power via Tikhonov regularization.5 The k-space search grid was also optimised to reduce design error. The result was a single motion robust pulse that had been optimised over all rotations. The pulse design parameters in Ref.(6) were used, with a target flip-angle of 60°.6 Comparisons were drawn between a 4-spoke MRP, and a conventionally designed 3-spoke pulse (CDP) that use only the central CSM. We compared a 4-spokes MRP to a 3-spokes CDP to compensate for the added complexity of improving the flip-angle at multiple positions. Pulse performance was evaluated in terms of the error in magnitude and phase of excitation profiles. Normalised root-mean-squared error (nRMSE) of the magnitude profiles was calculated based on the error between each evaluated rotation and the central position. CDPs were designed with and without the k-space search grid optimisation because of its effect on susceptibility to motion.Results
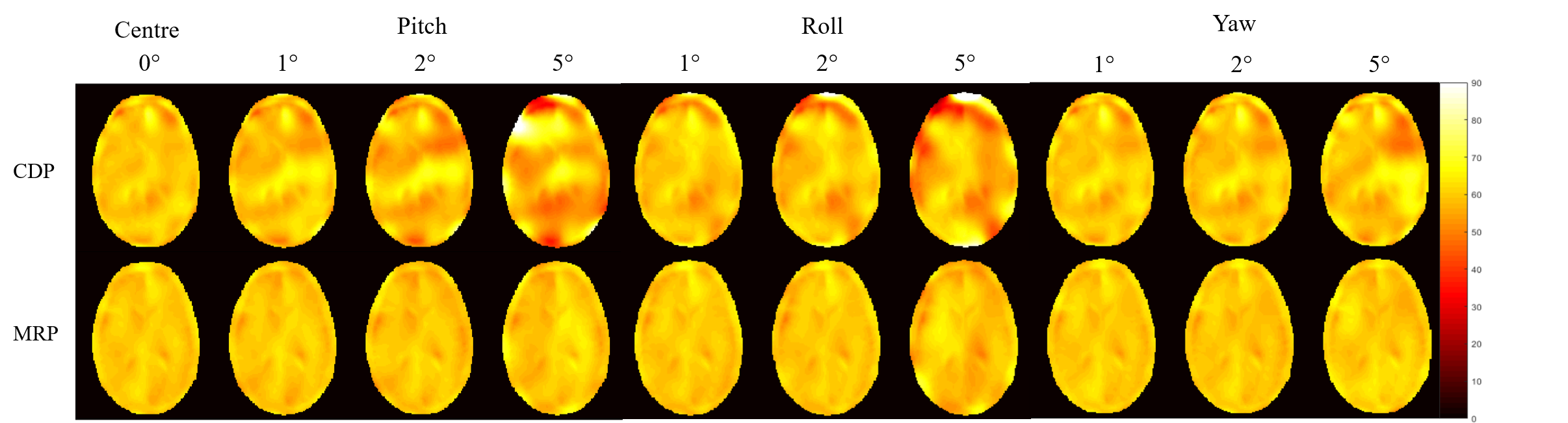
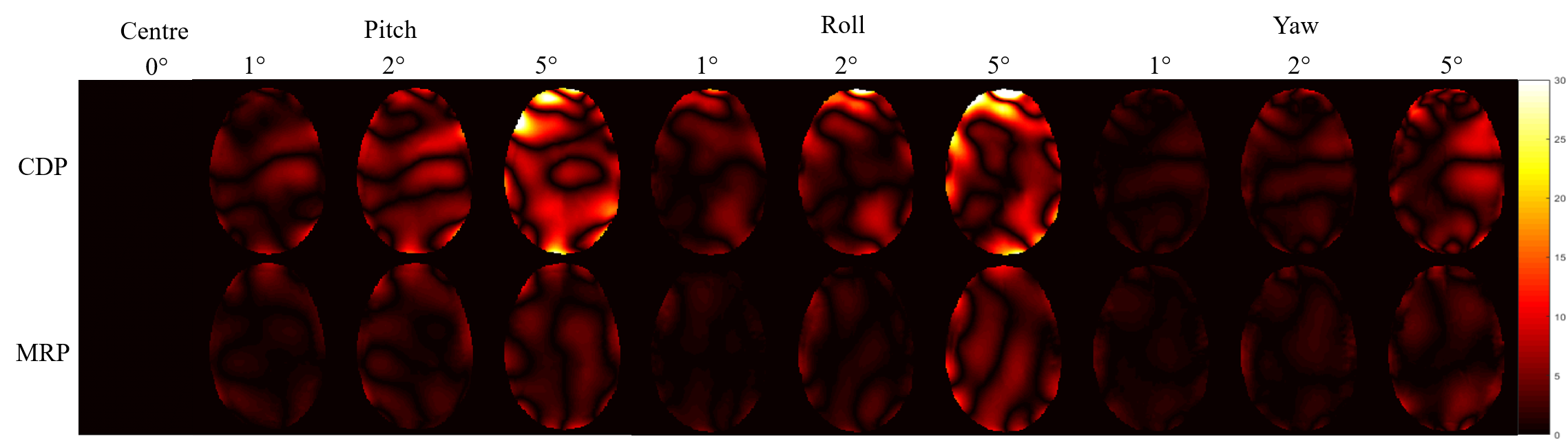
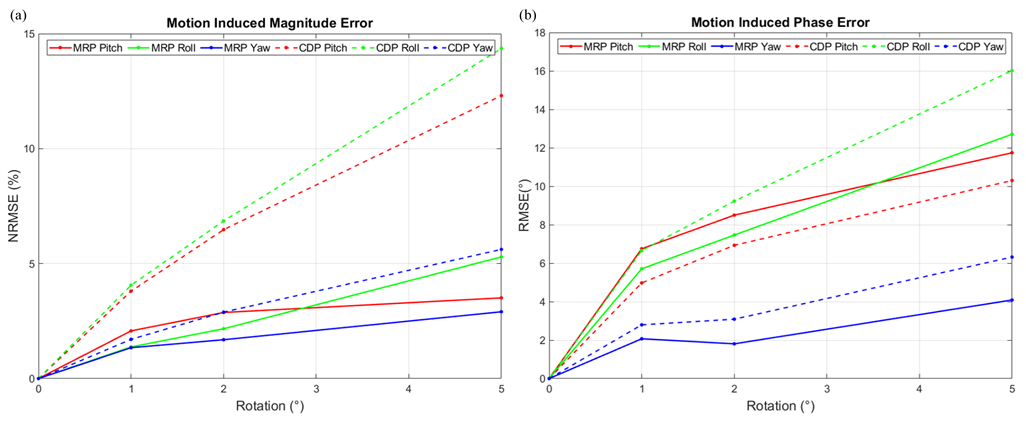
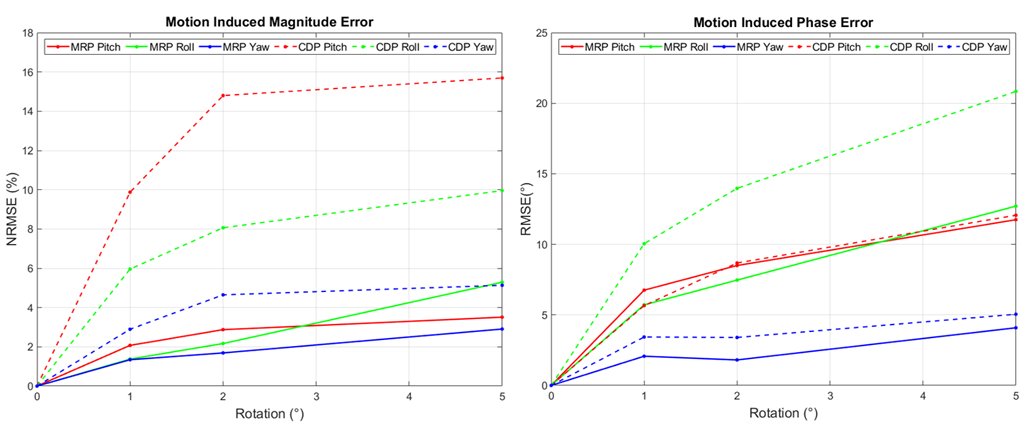
The nRMSE was lower at the central evaluation (no motion) for a 4-spoke MRP (nRMSE = 3.4%) than a 3-spoke CDP (nRMSE = 5.0%). Magnitude profiles from evaluations along pitch/roll/yaw are shown in Figure (2). The MRP produced highly homogeneous magnitude distributions along all rotations compared to the CDP. Figure (3) displays absolute magnitude difference profiles of the CDP and MRP, evaluated over 1°, 2°, 5° roll/pitch/yaw rotations, created by taking the absolute difference between each evaluation in Figure (2) and the central evaluation. The MRP showed superior magnitude difference profiles to the CDP at all evaluated positions, with most improvement shown at 5° rotations. CDP evaluations at 5° pitch and 2°,5° roll rotations show regions with large deviations, which are mitigated with the MRP pulse. This is further confirmed by Figure (4-a), displaying nRMSE due to motion at each rotation and show the 4-spoke MRP produced less error due to motion than the 3-spoke CDP at all evaluated rotations. The largest magnitude error recorded was 14.3% at CDP 5° roll, while the MRP yielded 5.2%. Figure (4-b) shows root-mean-squared error (RMSE) of phase due to motion. The MRP showed lower phase errors for roll and yaw rotations, however, inferior performance along pitch. The CDP results presented in Figures (2,3,4) excluded the k-space search grid optimisation. Optimising the k-space search grid for CDPs leads to reduced design error at the central position, however increased susceptibility to motion in most cases. The design error using the optimisation is nRMSE = 3.7%, and without the optimisation nRMSE = 5.0% at the central position. This differing susceptibility to motion can be seen when comparing Figure (4), and Figure (5a, b) which displays the magnitude and phase errors of the k-space search grid optimised CDPs. Figure (5) shows large changes in pitch evaluations compared to non-optimised CDPs.Discussion
We compared the 4-spokes MRP to 3-spokes CDP. While the MRP pulse waveform is therefore longer than the CDP, this allows improving the flip-angle at multiple positions. While CDP pulse performance could be improved via k-space search grid optimisation, this made the CDPs more susceptible to motion. Figures (4-5) imply the k-space search grid design requires consideration, as it appears to impact susceptibility to motion. While the MRP maintained magnitude homogeneity far better than CDPs, the phase profiles show less improvement. Initial tests showed that phase relaxation introduces a trade-off between motion robustness of the magnitude profile and the phase profile, which is currently under investigation. The design was limited to 5° rotation due to a large breakdown in phase past this point.Conclusion
The results presented show potential of rotation-robust excitation pulses as a method of maintaining highly homogeneous magnitude profiles. Future work will focus on extending the approach to include translational motion as well. The potential for extending the motion-robust design to incorporate multiple subjects similar to Ref.(4), to create a “motion-robust universal pulse” is also of interest.Acknowledgements
No acknowledgement found.References
1. Zhu, Y. Parallel Excitation with an Array of Transmit Coils. Magn. Reson. Med. 51, 775–784 (2004).
2. Kopanoglu, E., Plumley, A., Erturk, A., Deniz, C. & Wise, R. Implications of within-scan patient head motion on B1+ homogeneity and specific absorption rate at 7T. in ISMRM 2019 (2019).
3. Christ, A. et al. The Virtual Family - Development of surface-based anatomical models of two adults and two children for dosimetric simulations. Phys. Med. Biol. 55, (2010).
4. Gras, V., Vignaud, A., Amadon, A., Le Bihan, D. & Boulant, N. Universal pulses: A new concept for calibration-free parallel transmission. Magn. Reson. Med. 77, 635–643 (2017).
5. Grissom, W. et al. Spatial Domain Method for the Design of RF Pulses in Multicoil Parallel Excitation. 629, 620–629 (2006).
6. Grissom, W. A. et al. Advancing RF pulse design using an open-competition format: Report from the 2015 ISMRM challenge. Magn. Reson. Med. 78, 1352–1361 (2017).
Figures