3629
Impact of machine learning in iterative motion corrected reconstructions1ISR-Lisbon/LARSyS and Department of Bioengineering, Instituto Superior Técnico – University of Lisbon, Lisbon, Portugal, Lisbon, Portugal, 2Laboratorio de Procesado de Imagen, Universidad de Valladolid, Valladolid, Spain, Valladolid, Spain, 3Centre for the Developing Brain and Department of Biomedical Engineering, School of Biomedical Engineering and Imaging Sciences, King’s College London,London U.K, London, United Kingdom
Synopsis
Incorporation of machine learning (ML) approaches in MR reconstruction is currently a hot topic because of the enormous potential that deep learning solutions have shown in vision and imaging communities. Recently, a procedure known as NAMER has been proposed; this procedure incorporates a ML module into an iterative reconstruction for multishot acquisitions with inter-shot motion estimation and correction (referred to as aligned reconstruction). In this abstract we provide some insight on the benefits and limitations associated to NAMER by analyzing its behavior both with a steady and a discontinued use of the ML artifact cleaning step.
Introduction
Aligned reconstructions have been proposed to find, in an optimization loop, both the reconstructed image and the rigid transformation needed to align each shot. NAMER1 (network accelerated motion estimation and reduction) consists in embedding, in the loop just mentioned, a CNN to remove artifacts from the current image estimate prior to estimating the motion parameters. The CNN is trained with synthetically generated motion; hence, training and image reconstruction are totally independent processes, a fact that we hypothesize has an impact in overall performance. We pursue to gain insight into the benefits that NAMER provides and to determine the conditions under which the inclusion of the CNN is beneficial. To this end, the two original methods are run, together with two alternatives that consist in different ways of early discontinuation of the CNN involvement; specifically, (1) the CNN is applied only once and (2), the CNN is applied by monitoring the behaviour of the (in)consistency metric, i.e., of the term ||y-Ex||2, where y stands for the original k-space data, x is the reconstructed image and E is the coding operator as defined in 2.Methods
Generation of a synthetic dataset:In vivo T2-weighted MRI images of the abdomen were used in the simulation, obtained from the CHAOS database (https://doi.org/10.5281/zenodo.3431873). Data for 12 subjects were randomly selected, the 10 central slices extracted and resampled to 128×128. Training was performed by generating 10 random rigid motion trajectories with a displacement level of 10, and applying the forward model to data from 10 subjects. Coil sensitivity data (32 channels) and code for generating the motion-corrupted data were taken from the AlignedSense repository (https://github.com/ mriphysics/multiSliceAlignedSENSE). A fully-sampled four shot acquisition was simulated considering two different sampling schemes (regular parallel spacing - LinPar, and distributed sampling - Checkered, as in 3; complex noise was added to the k-space data.
Neural network training with the synthetic dataset:
CNN training was carried out using the NAMER Python code (https:// github.com/mwhaskell/namer_mri). The Matlab code required for image reconstruction and application of the forward model was adapted from the publicly available AlignedSense code by merging it with the relevant NAMER functions for application of the CNN step. The CNN takes as input patches of size 51 × 51 with a stride size of 8 extracted from the noisy motion-corrupted images, together with the noise/artifact image, obtained after subtracting the corresponding ground truth.
Algorithm evaluation:
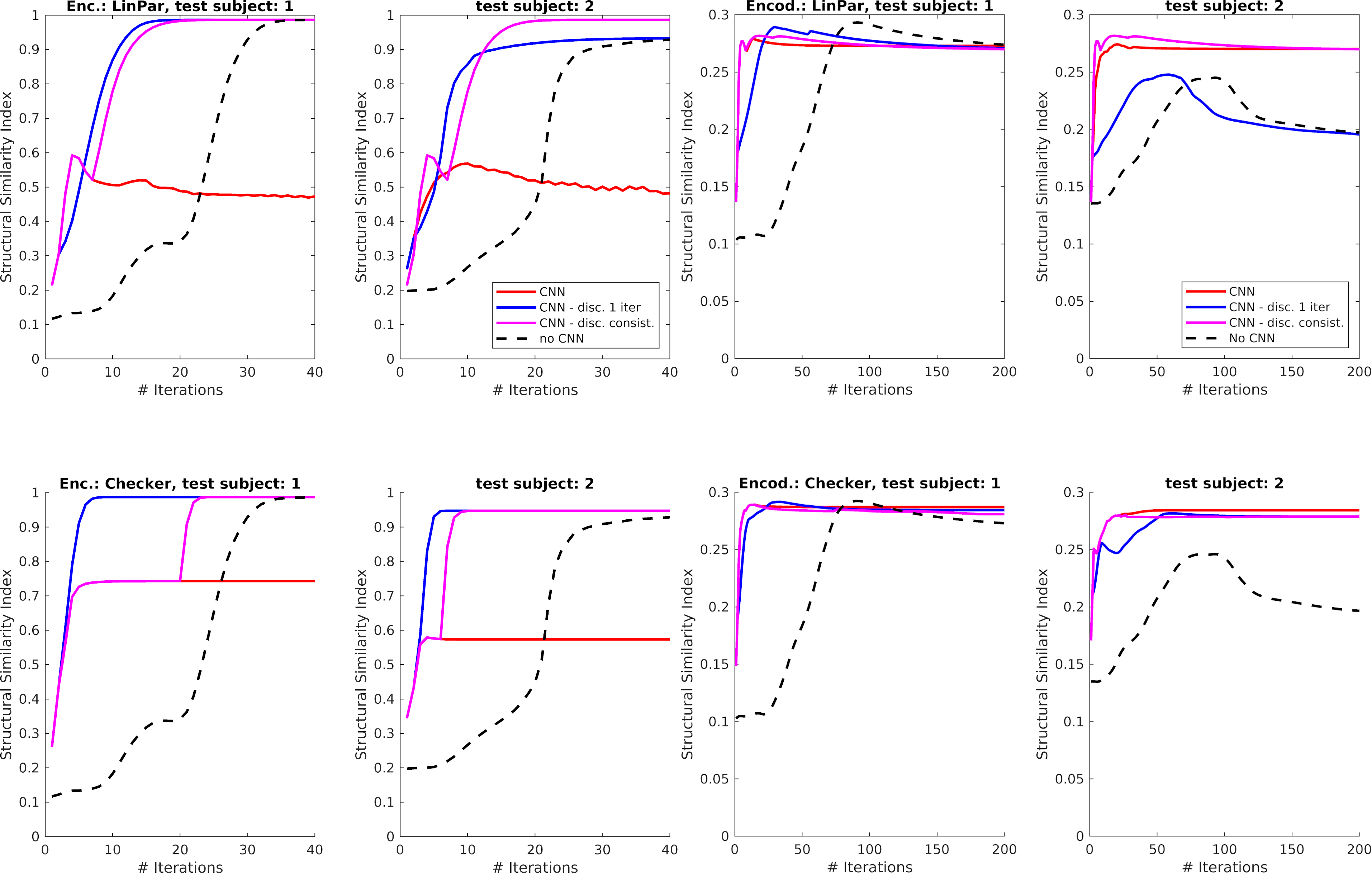
To evaluate the performance of the algorithms, a 5-fold cross-validation was performed whereby data from 8(2) subjects was selected for training(validation). Coil sensitivity data was considered only for testing, using motion trajectories previously unseen by the CNN. The reconstruction was carried out using standard AlignedSense, and with the extra CNN NAMER step. Approaches (1) and (2) referred to above have also been tested; for the second the CNN is disconnected when the (in)consistency metric starts to increase. The quality of the reconstructions was evaluated using the Structural Similarity Index (SSIM)4.
Results
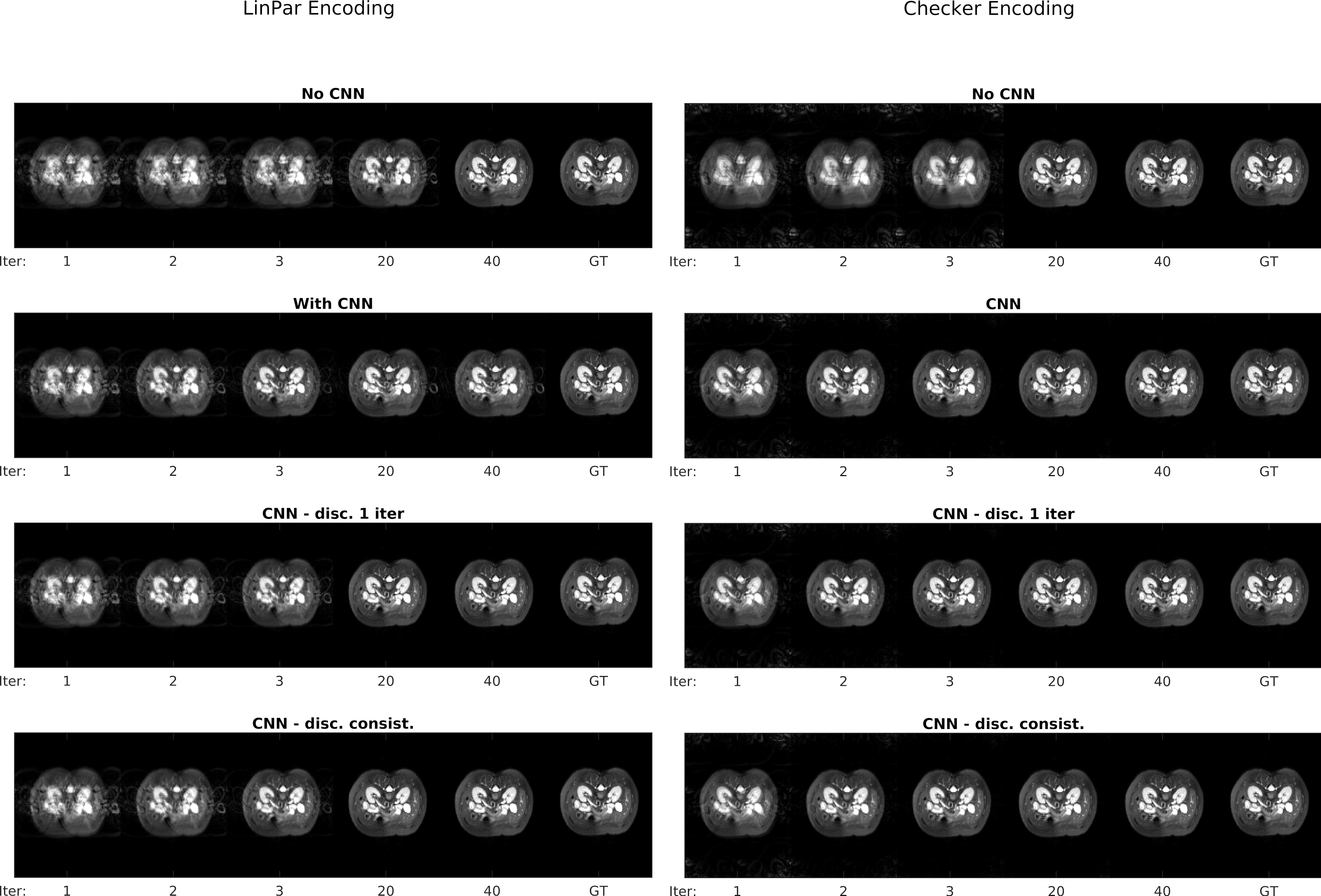
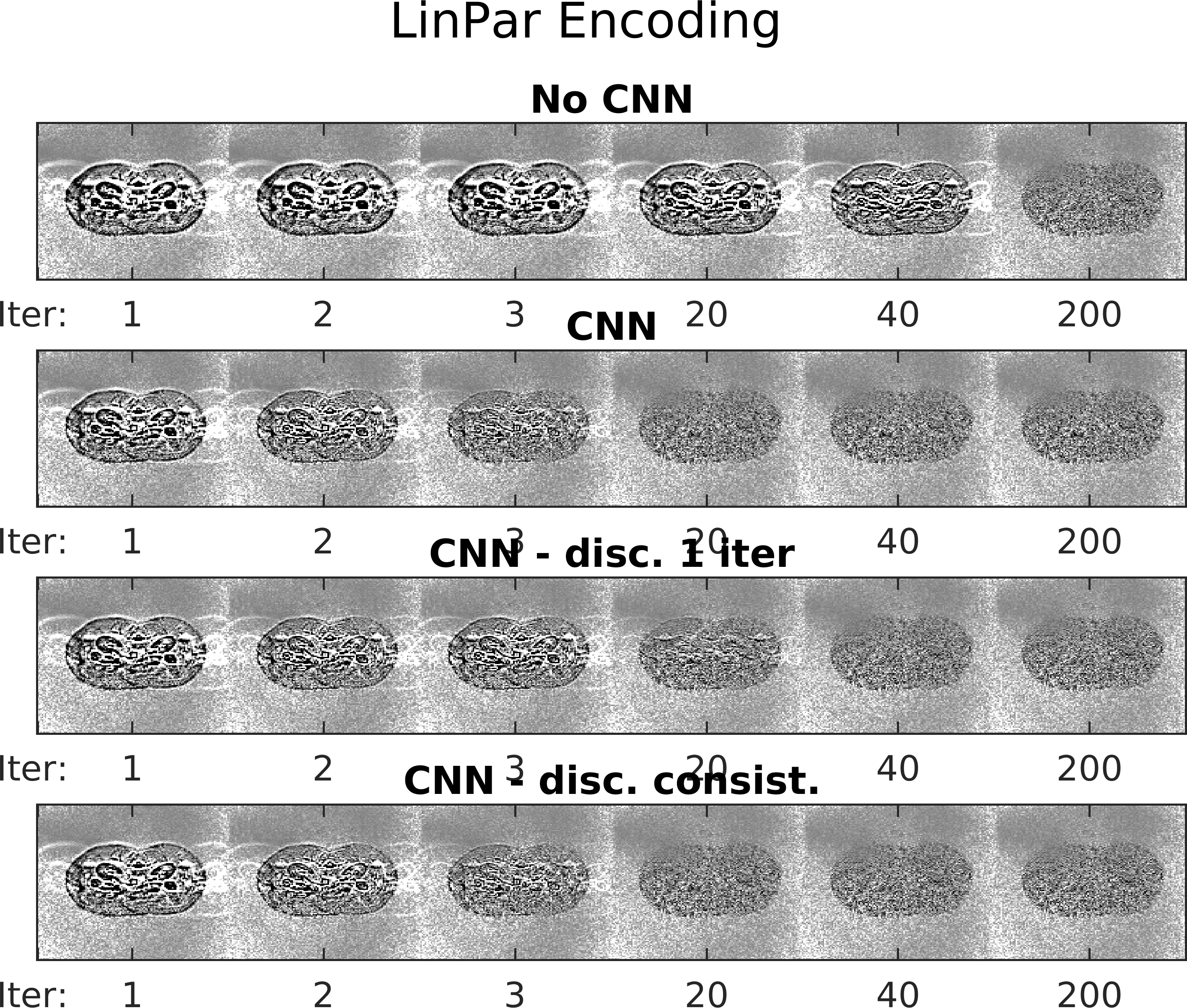
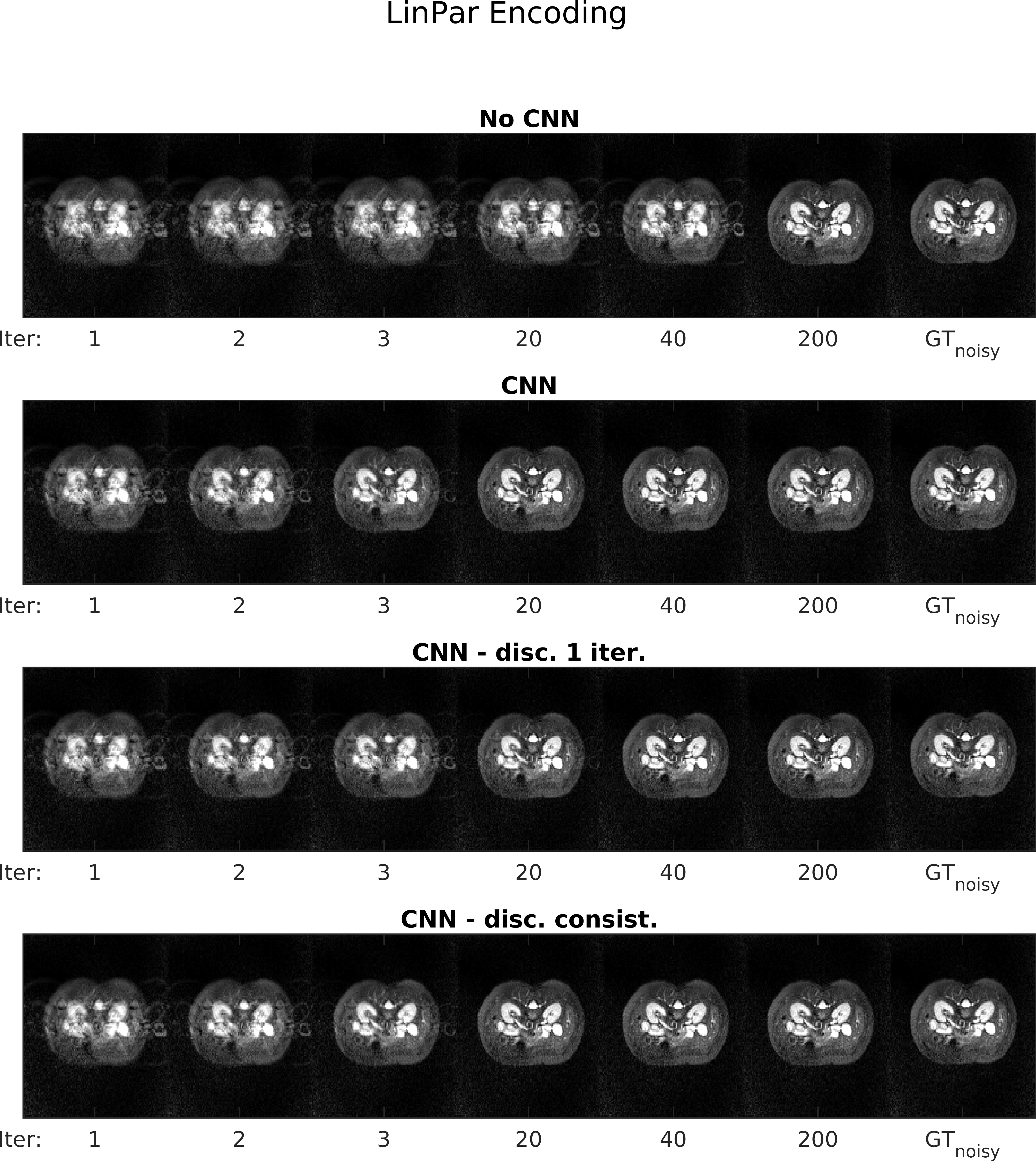
The motion-corrupted, reconstructed images and ground truth images (noiseless or with the same level of added noise) are shown in Figure 1, whereas the corresponding residual maps can be found in Figure 2.Discussion
In the original NAMER1, the authors claim that “they demonstrate that the application of the CNN allows for the efficient decomposition of the optimization”; our results indicate that this is indeed true since results using the CNN outperform those obtained from the optimization-only based method. However, in our paper deeper insight has been obtained about the improvement that NAMER provides as compared to a discontinued use of the cleaning stage; this is achieved by means of a six-fold scenario (two sampling patterns and three noise levels). Specifically, early disconnection seems a better option in low signal-to-noise-ratio (SNR) situations as well as for sampling patterns that are less motion robust, i.e., LinPar. Conversely, differences diminish for lower SNR and for a random-checkered trajectory. As the CNN is trained as an independent process of the image reconstruction procedure, it is not allowed to learn for progressively cleaner images. This may be playing a role in setting an upper bound on the maximum achievable quality, which is reached after a few iterations but cannot be transversed. If this is the case, a more exhaustive training to the CNN seems mandatory in which progressive refinement becomes also a source of knowledge so that the CNN generalization capability is enlarged.Conclusions
Early discontinuation of the ML-based cleaning stage provides either better or similar results than its steady use. This suggests that the original ML approach seems self limited by the training procedure, which is carried out independently of the iterative reconstruction. Enlarging its generalization capability by coupling the two procedures may break this limitation.Acknowledgements
This work was supported by the Portuguese Foundation for Science and Technology (FCT) grants (UID/EEA/50009/2019 and SFRH/BSAB/150270/2019), by the Ministerio de Ciencia e Innovación, Spain (grant TEC2017-82408-R) and by the ERC grant agreement no. [319456].References
1Haskell, M. W., Cauley, S. F., Bilgic, B., Hossbach, J., Splitthoff, D. N., Pfeuffer, J., ... & Wald, L. L. (2019). Network Accelerated Motion Estimation and Reduction (NAMER): Convolutional neural network guided retrospective motion correction using a separable motion model. Magnetic resonance in medicine. 82(4):1452-1461.
2 Cordero-Grande, L., Teixeira, R. P. A., Hughes, E. J., Hutter, J., Price, A. N., & Hajnal, J. V. (2016). Sensitivity encoding for aligned multishot magnetic resonance reconstruction. IEEE Transactions on Computational Imaging, 2(3), 266-280.
3 Cordero-Grande, L., Ferrazzi, G., Teixeira, R. P. A., O'Muircheartaigh, J., Price., A. & Hajnal J. V. (2019). Motion corrected MRI with DISORDER: Distributed and Incoherent Sample Orders for Reconstruction Deblurring using Encoding Redundancy. arxiv:1910.00540
4 Zhou, W., Bovik, A. C., Sheikh, H. R., & Simoncelli, E. P. (2004). Image Quality Assessment: From Error Visibility to Structural Similarity. IEEE Transactions on Image Processing. 13(4): 600–612.
Figures