3470
Online reconstruction of GRE Fat Navigators with Gadgetron on Siemens Terra 7T Scanner1Department of Psychology, Royal Holloway, University of London, London, United Kingdom, 2Wolfson Brain Imaging Centre, University of Cambridge, Cambridge, United Kingdom, 3Siemens Healhineers, London, United Kingdom
Synopsis
High resolution Ultra High Field 7T imaging is highly prone towards involuntary motion artifacts. Fat Navigator based motion correction provides a robust solution but it is a retrospective correction method. In this study we present an online reconstruction method 3D GRE FatNavs with open-source reconstruction tool, Gadgetron. We improved the performance of the GRAPPA reconstruction pipeline in Gadgetron for fast online reconstruct FatNav. We also implemented a Python Gadget to perform fsl Flirt based co-registration through NiPype to produce motion parameters from the FatNav.
Introduction
The number of Ultra-high field (UHF) 7T MRI systems has increased substantially worldwide in recent years. At our institute, there is a real desire to run clinical studies at 7T. Others have shown that very high resolution (<500μm resolution) structural images can be acquired at 7T, but with increasing resolution, scans become prone to artifacts resulting from participants’ involuntary motion. This can be a critical limitation for clinical studies on children, elderly or stroke and dementia patients1. 3D fat-navigators (FatNav)2 have emerged as a robust approach to motion correction, that has the advantage of requiring no marker to be attached or worn by participants. Current implementations of FatNav on Siemens platform are retrospective. The primary bottleneck of applying FatNav based prospective motion correction is the real-time reconstruction of the FatNav scan and its co-registration with a reference image to generate the motion parameters. In this study, we implement a VE12U pulse sequence with FatNav embedded in a host GRE/FLASH pulse sequence, with reconstruction in the open source Gadgetron3 framework, and motion parameter estimation using the Gadgetron-Python link to FSL.Methods
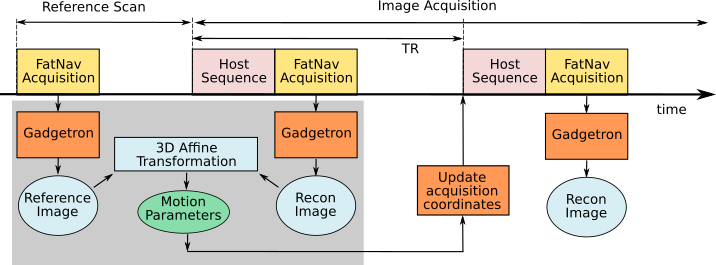
The standard Siemens GRE pulse sequence was modified to insert a FatNav module every TR that uses fat-selective binomial RF pulses to acquire sparse fat-only head images with the signal primarily localized to the sub-cutaneous fat and bone-marrow in the skull as described by Gallichan et al2. The FatNav module had 4mm isotropic resolution, 3-pulse binomial excitation with selective excitation frequency (bandwidth 1950 Hz/pixel), 44x64x64 matrix, over a 176x256x256mm FOV, 1.49/3.0ms TE/TR, 4x4 GRAPPA acceleration and 6/8 Partial Fourier undersampling. Total acquisition time for one FatNav module was ~1.15sec. All k-space lines from the FatNav module are tagged with the “RT_FEEDBACK” marker to enable them to be separately reconstructed later.Images were reconstructed by Gadgetron running online on the scanner “MARS” reconstruction computer. Figure 1 shows how Gadgetron was used to reconstruct the reference FatNav image at the start of a scan and all subsequent FatNav images. We modified the “Generic_Cartesian_Grappa” gadget chain provided with Gadgetron to reconstruct the highly accelerated FatNav images. Here the time-consuming calculation of GRAPPA weights were performed once while reconstructing the reference FatNav images and saved in the computer memory for application in de-aliasing the subsequent FatNav images to improve performance. Co-registration of FatNav Images with the reference image to produce a rotation matrix was done with a custom Python Gadget utilizing FSL Flirt5 through NiPype6.
Results
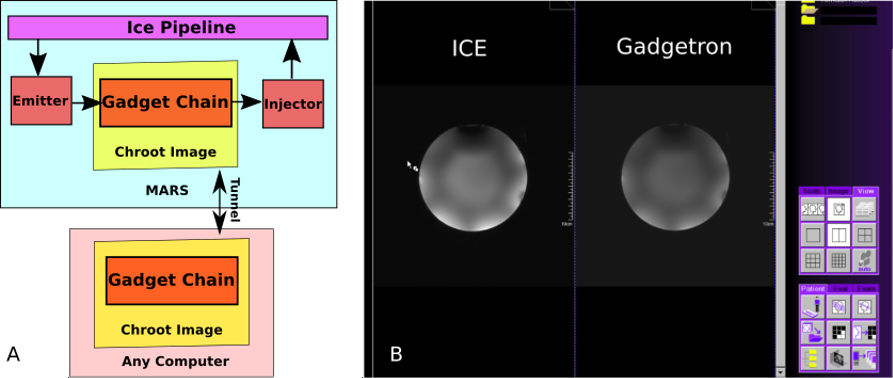
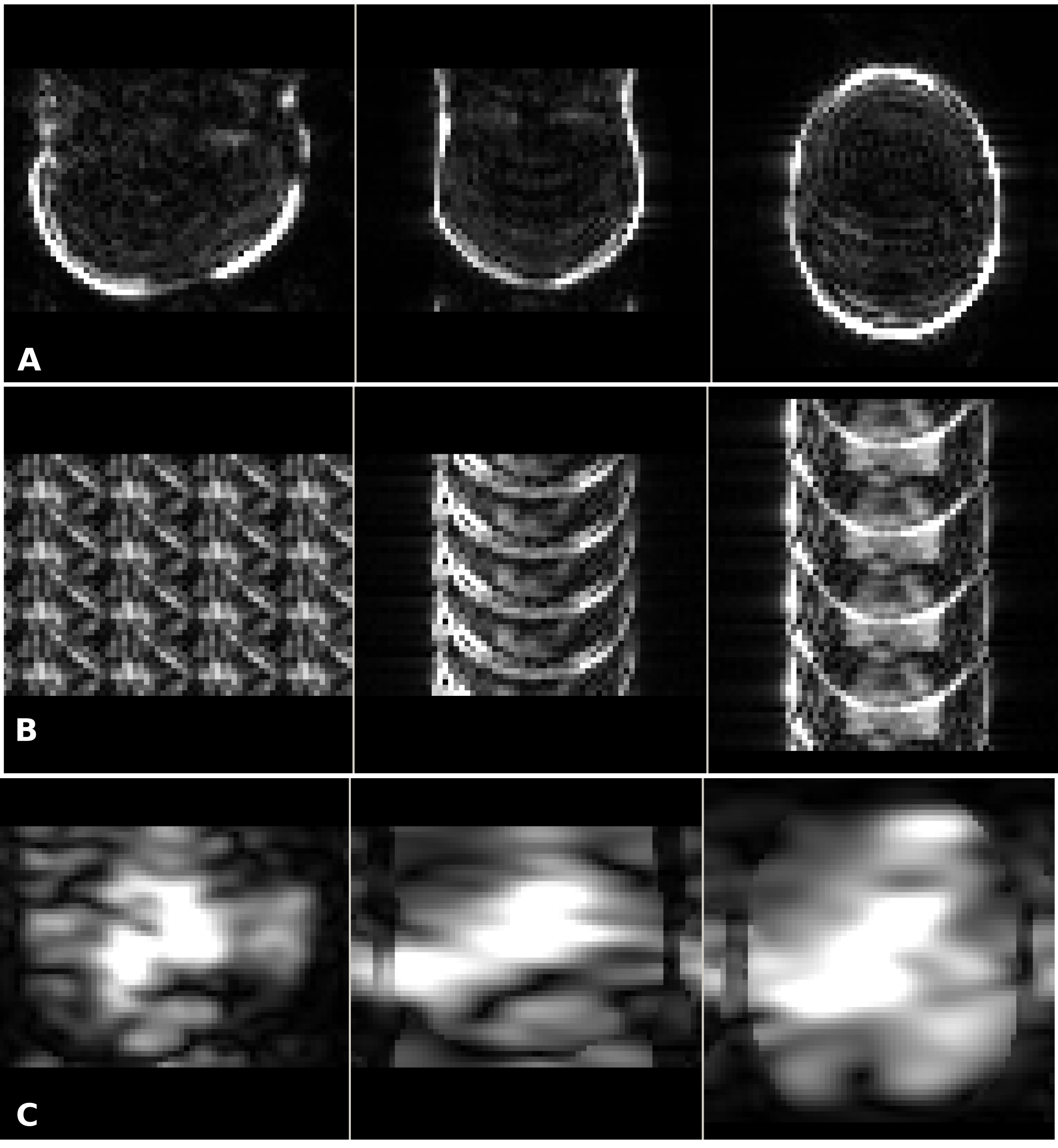
Online Reconstruction of Phantom Image:Figure 2B shows reconstruction of a phantom image with the default Generic_Cartesian_Grappa gadget chain. The image reconstructed through Gadgetron is visually identical to the one reconstructed with ICE.Online Reconstruction of Reference FatNav Image:We scanned a volunteer with the modified GRE sequence to acquire a standalone FatNav image. This was passed through the Generic_Cartesian_Grappa gadget chain provided with Gadgetron on MARS. It successfully reconstructed the image of subcutaneous fat and skull in the brain as shown in Figure 3A in 24s on a desktop computer. Processing of GadgetronGrappaUnmixingGadget took 23.224 sec. The GadgetronGrappaUnmixingGadget performs multiple image reconstruction tasks like coil map estimation, calibration, producing the GRAPPA unmixing weights (see Figure 3B) etc. This gadget also applies the unmixing weights on the aliased images (see Figure 3C) in around 486ms.
Optimization of the Gadget Chain:To improve performance, the GRAPPA unmixing weights were cached from the reconstruction of the initial (reference) FatNav Image for use on future FatNav volumes. Using the cached weights took 1.171s per FatNav volume.
Introduction of FSL Flirt coregistration in the Gadget Chain for Motion Correction:After the reconstruction of the FatNav image with optimized gadget chain, in order to generate the motion parameters, a Python Gadget was added that uses the Nipype package to call FSL Flirt’s affine co-registration functionality, giving a 4x4 affine transformation/rotation matrix. The new image reconstruction gadget chain with Flirt co-registration takes 2.32sec.
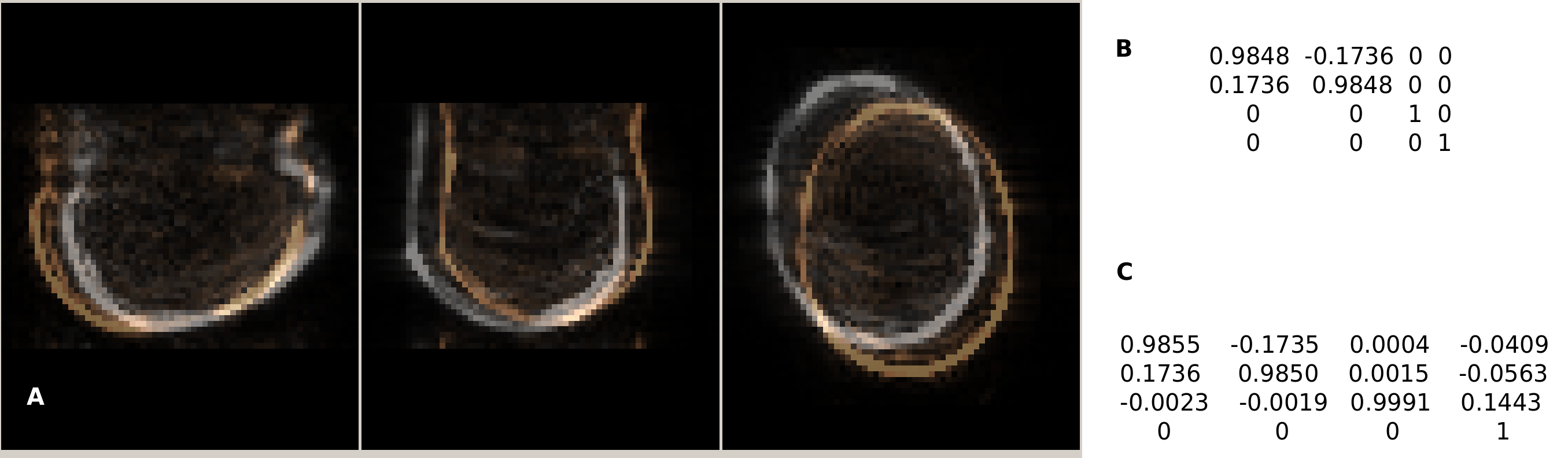
Emulation of Motion and Comparison of Motion Parameters:In order to test if the motion correction procedure was working properly, we emulated head motion by manually rotating the reference image by 10o along the Z axis (see Figure 4A). The rotation matrix used to perform this manual rotation is shown in Figure 4B. Then the FatNav Acquisition was passed through the modified gadget chain with Flirt co-registration functionality and the corresponding rotation matrix produced is shown in Figure 4C. The rotation matrices were almost identical, demonstrating successful co-registration inside the Gadget chain.
Discussion
One of the key motivations of using prospective motion correction is its application in patient studies especially in children and dementia population where involuntary motion inside the scanner is high. But the optical camera systems requiring in-scanner calibrations and dental markers etc. make it tougher to use with the aforementioned populations. The study by Gallichan et al. showed that the Fat Navigator based approach can provide a robust estimate of involuntary motion but it is a retrospective method. In this study we used Gadgetron to reconstruct the FatNav image, optimized the gadget chain to reduce latency (to 1.171s at this time) and also successfully introduced a FSL Flirt co-registration Gadget to compute the rotation matrix (2.32s) ready for feedback to the pulse sequence for motion correction.Acknowledgements
CTR is funded by a Sir Henry Dale Fellowship from the Wellcome Trust and the Royal Society [098436/Z/12/B]. This study was funded by the NIHR Cambridge Biomedical Research Centre and MRC Clinical Research Infrastructure Award for 7T.References
1. Rytty, R., Nikkinen, J., Suhonen, N., Moilanen, V., Renton, A. E., & Traynor, B. J. (2014). Functional MRI in patients with the C9ORF72 expansion associate frontotemporal dementia. Mol. Biol, 3(117), 10-4172.
2. Gallichan, D., Marques, J. P., & Gruetter, R. (2016). Retrospective correction of involuntary microscopic head movement using highly accelerated fat image navigators (3D FatNavs) at 7T. Magnetic resonance in medicine, 75(3), 1030-1039.
3. Hansen, M. S., & Sørensen, T. S. (2013). Gadgetron: an open source framework for medical image reconstruction. Magnetic resonance in medicine, 69(6), 1768-1776.
4. Hansen, M. S., Xue, H., & Kellman, P. Gadgetron: Open Source Image Reconstruction. 5. Jenkinson, M., Beckmann, C. F., Behrens, T. E., Woolrich, M. W., & Smith, S. M. (2012). Fsl. Neuroimage, 62(2), 782-790.
5. Jenkinson, M., Beckmann, C. F., Behrens, T. E., Woolrich, M. W., & Smith, S. M. (2012). Fsl. Neuroimage, 62(2), 782-790.
6. Gorgolewski, K., Burns, C. D., Madison, C., Clark, D., Halchenko, Y. O., Waskom, M. L., & Ghosh, S. S. (2011). Nipype: a flexible, lightweight and extensible neuroimaging data processing framework in python. Frontiers in neuroinformatics, 5, 13.
Figures