3400
Off-Resonance Self-Correction for Single-Shot Imaging1Institute for Biomedical Engineering, ETH Zurich and University of Zurich, Zurich, Switzerland
Synopsis
We present a novel algorithm capable of determining a B0 map and an off-resonance corrected reconstructed image from a single-shot acquisition. The functionality of the algorithm was shown in-vivo for multiple imaging geometries using regular undersampled single-shot EPI and Spiral readouts showing stable convergence. In addition, the method is tested for the common situation of inter-scan subject movement, in which pre-acquired field maps would be rendered invalid.
Introduction
Single-shot acquisitions allow for high temporal resolution and are robust against motion making them the method of choice for several applications such as fMRI, DWI or ASL. However, a main limiting factor are artifacts introduced due to B0 inhomogeneities, in particular when aiming for high resolution. The related artefacts can be addressed in the image reconstruction when incorporating knowledge of the B0 distribution, which is commonly provided by a field map obtained by separate multi-echo GRE imaging1. However, calculating accurate B0 maps requires multiple post-processing steps (like masking), which are prone to errors. In addition, the acquisition takes time, and inter-scan motion can render the maps invalid. For these reasons, B0 off-resonance is often neglected in practice. To address these issues, algorithms have been devised to correct the acquired data without the need of a preparation scan2,3 requiring specific k-space trajectories. A generic approach is to jointly estimate B0 map and object by minimizing signal model violations3. Yet, this method is not widely used, presumably owing to the choice of the algorithm to handle the involved non-convex optimization problem. In this work, a novel algorithm is proposed that improves convergence to meaningful solutions of this non-convex optimization problem, i.e. estimating B0 and reconstructing the object. First imaging results are presented using standard single-shot EPI and Spiral sampling (R=3). Moreover, the correction of motion induced B0 artefacts is shown as an application.Methods
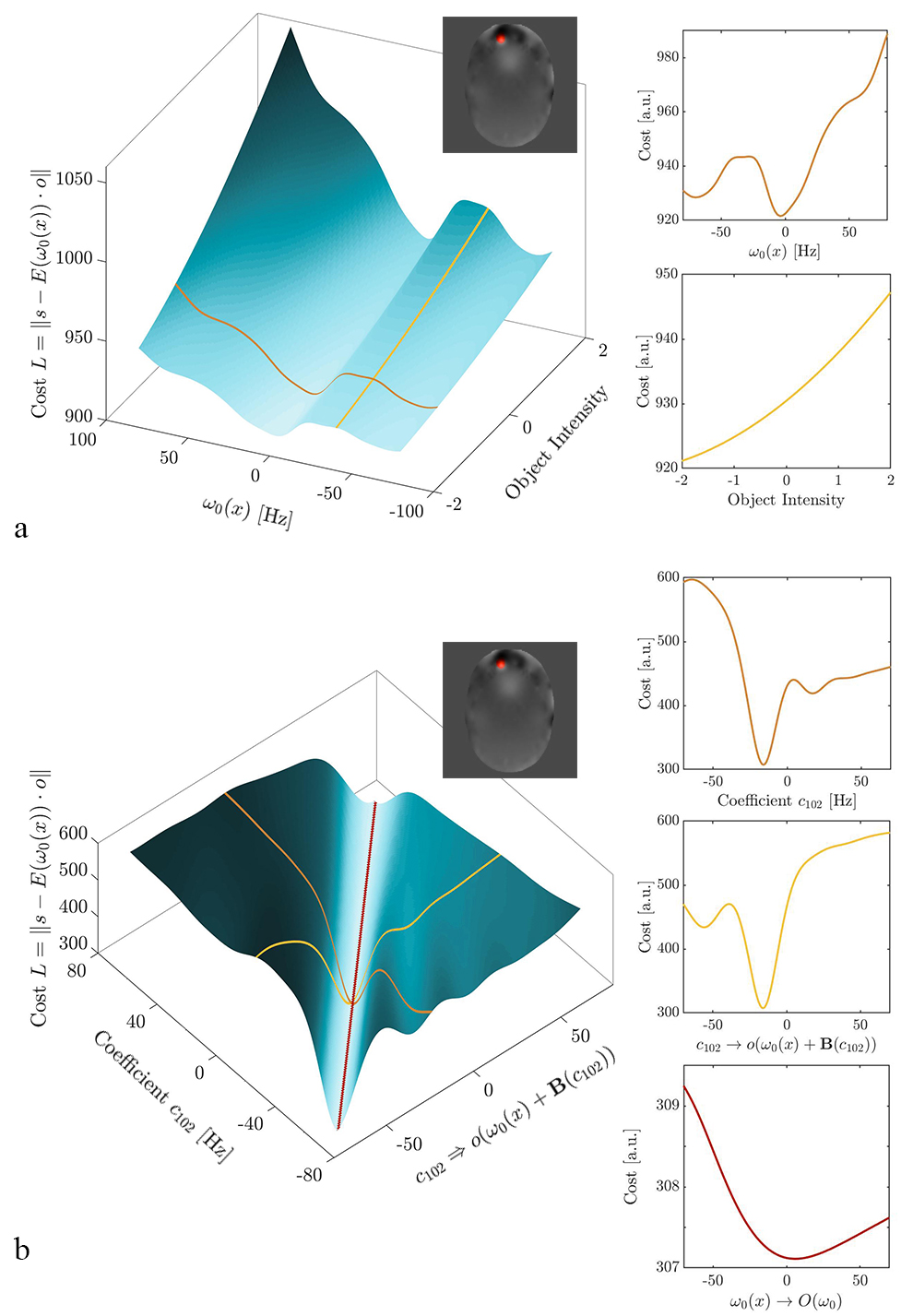
A Cost Function in B0Given the acquired signal $$$s(t)$$$, the object $$$o(\textbf{x})$$$ and the field map $$$\omega_0(\textbf{x})$$$ can be obtained by minimizing the cost function $$$L$$$
$$L(\omega_0(\textbf{x}),o(\textbf{x}))=\Vert\,s(t)-E(\textbf{k}(t),\omega_0(\textbf{x}))\cdot o(\textbf{x})\Vert^2\rightarrow\text{min}\;\;\;(1)$$
with the encoding matrix $$$\textbf{E}$$$ having entries
$$E_{mn}=\exp(-i\omega_0(\textbf{x}_n)t_m)\cdot\exp(-i2\pi\textbf{k}(t_m)\cdot\textbf{x}_n).$$
The cost is convex in $$$o(\textbf{x})$$$ and non-convex in $$$\omega_0(\textbf{x})$$$ as depicted in Figure 1a.
It was proposed previously to solve the problem by alternating the following two steps2:
(i) Reconstructing an object $$$o_i(\textbf{x})$$$ for the current B0 map guess $$$\omega_{0,i}(\textbf{x})$$$
(ii) Optimizing$$$\;\omega_{0,i}(\textbf{x})\rightarrow\omega_{0,i+1}(\textbf{x})\;$$$while fixing $$$o_i(\textbf{x})$$$.
Alternating optimization converges in general quickly only for loosely coupled variables4. However, the variables are strongly coupled by an image reconstruction accounting for B05,6
$$o(\textbf{x})=\left(E^H(\textbf{k}(t),\omega_0(\textbf{x}))\,E(\textbf{k}(t),\omega_0(\textbf{x}))\right)^{-1}\,E^H(\textbf{k}(t),\omega_0(\textbf{x}))\cdot\,s(t)\;\;\;(2)$$
which can be exploited by inserting (2) into (1) leading to
$$L(\omega_0(\textbf{x}))=\Vert\sigma(\textbf{k})\cdot(s(t)-\left(E^H(\textbf{k},\omega_0)\,E(\textbf{k},\omega_0)\right)^{-1}\,E^H(\textbf{k},\omega_0)\cdot\,s(t))\Vert^2\rightarrow\text{min}.\;\;\;(3)$$
Here, $$$\sigma(\textbf{k})$$$ denotes a k-space filter to reduce the strong weighting of signal from the k-space center. The resulting search space is rearranged such that objects reconstructed with similar field maps and hence similar distortions are close to each other in a Euclidean sense but still exhibits a non-convex structure (Figure 1b). However, the resulting cost is only a function in $$$\omega_0(\textbf{x})$$$ which reduces the dimensionality of the search space drastically and searching for a minimum means traversing along the tuples $$$(\omega_0(\textbf{x}),o(\omega(\textbf{x})))$$$ allowing for greater step sizes (red line Figure 1).
Note that a reconstructed object is obtained as an intermediate result when evaluating the cost $$$L$$$ as described in equation (3).
Optimization Strategy and Regularization
Since the bulk information of the B0 distribution can be represented on a coarser resolution7,8, a smoothness constraint on B0 may be applied to stabilize convergence and speed-up the algorithm9. This is implemented by approximating B0 by a sum of Gaussians ($$$\sigma=0.8$$$) weighted by coefficients $$$c_i$$$ on a grid with grid points $$$x_i$$$:
$$\omega_0(\textbf{x})\approx\,B(c_i):=\sum_i\,c_i\cdot\beta(x-x_i).$$
In the current implementation, the dimensionality of the problem can thereby be reduced from ~50’000 (#voxels) to around 400 (20x20 coefficients). To minimize $$$L$$$, a standard gradient descent with discrete gradient calculations is performed to update the coefficients of the vector$$$\;c_i$$$:
$$c_{i+1,j}=c_{i,j}+\frac{L(B(c_i+\Delta\omega\cdot\,e_j))-L(B(c_i))}{\Delta\omega}$$
with a unit vector$$$\;e_j\;$$$and$$$\;\Delta\omega=0.2\text{Hz}$$$. To further decrease the number of local minima, $$$\sigma(\textbf{k})$$$ is set to mask the resolution of the used data to the B0 map's target resolution.
MR Experiments
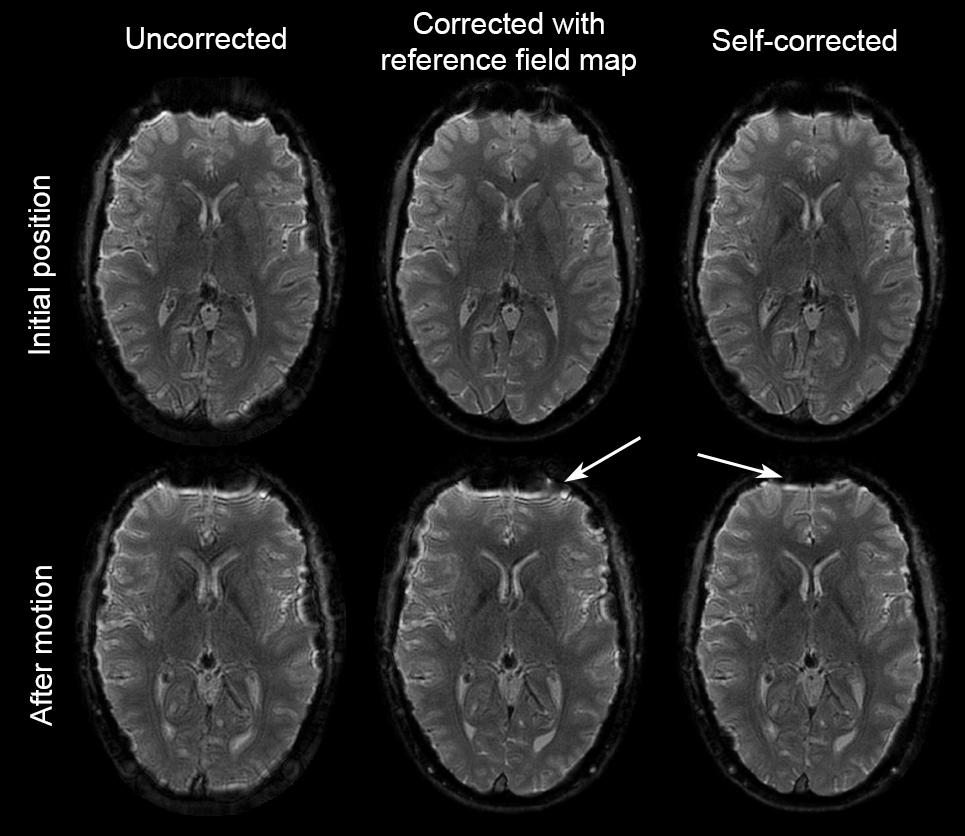
Measurements were performed on a 3T MR system (Philips Healthcare, Best, The Netherlands) using a 16-channel head coil with integrated magnetic field sensors10 (Skope MR Technologies, Zurich, Switzerland) to record the actual k-space trajectory. EPI and Spiral scans were played out with a TE of 24ms (FOV=22cm, in-plane resolution 1mm, R=3). As a reference, a field map from a 4-echo GE sequence $$$(\Delta t=1.2\text{ms})$$$ was fitted. To investigate motion related effects on B0, a subject was instructed to nod and remain in the position for a second scan.
Results
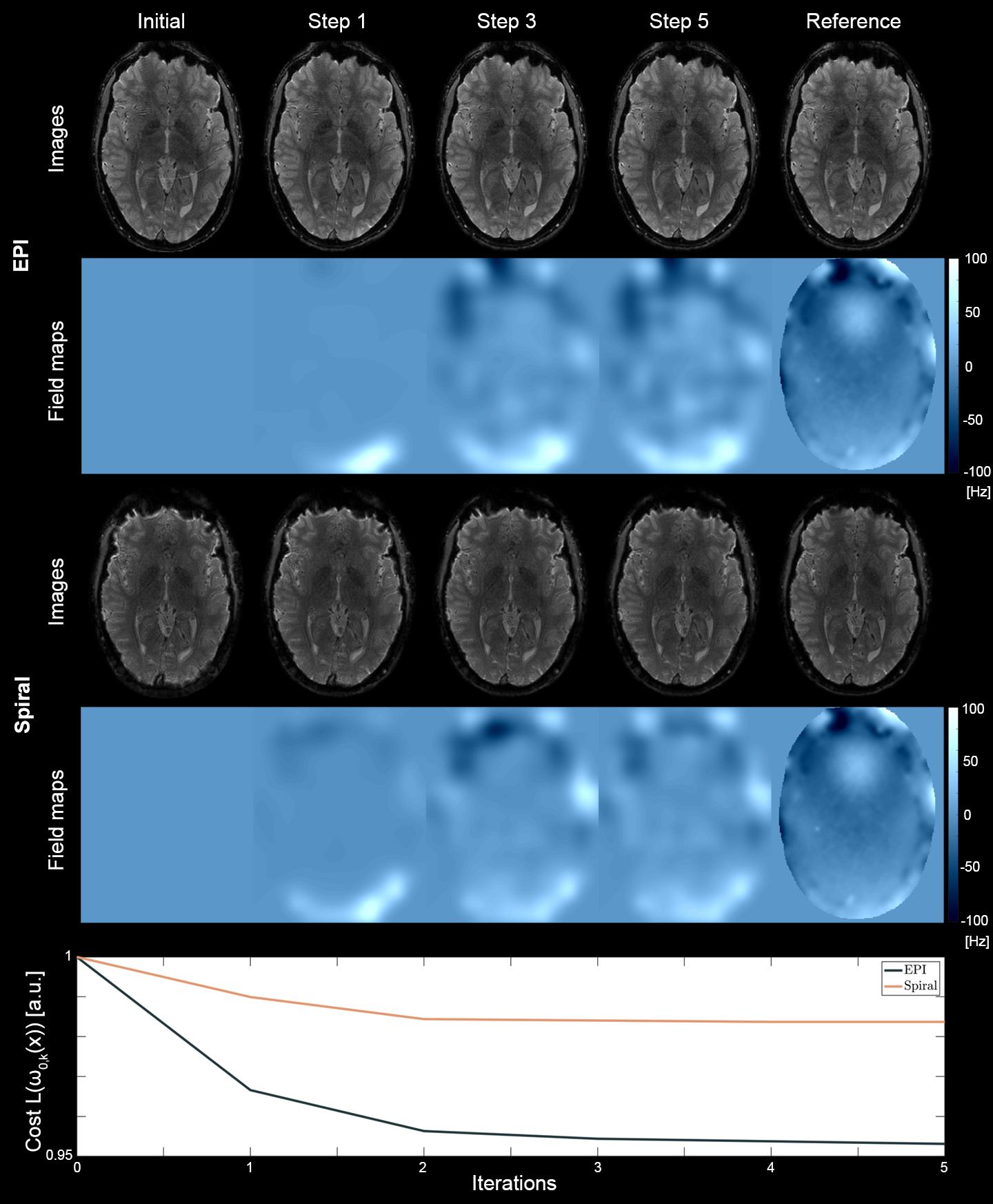
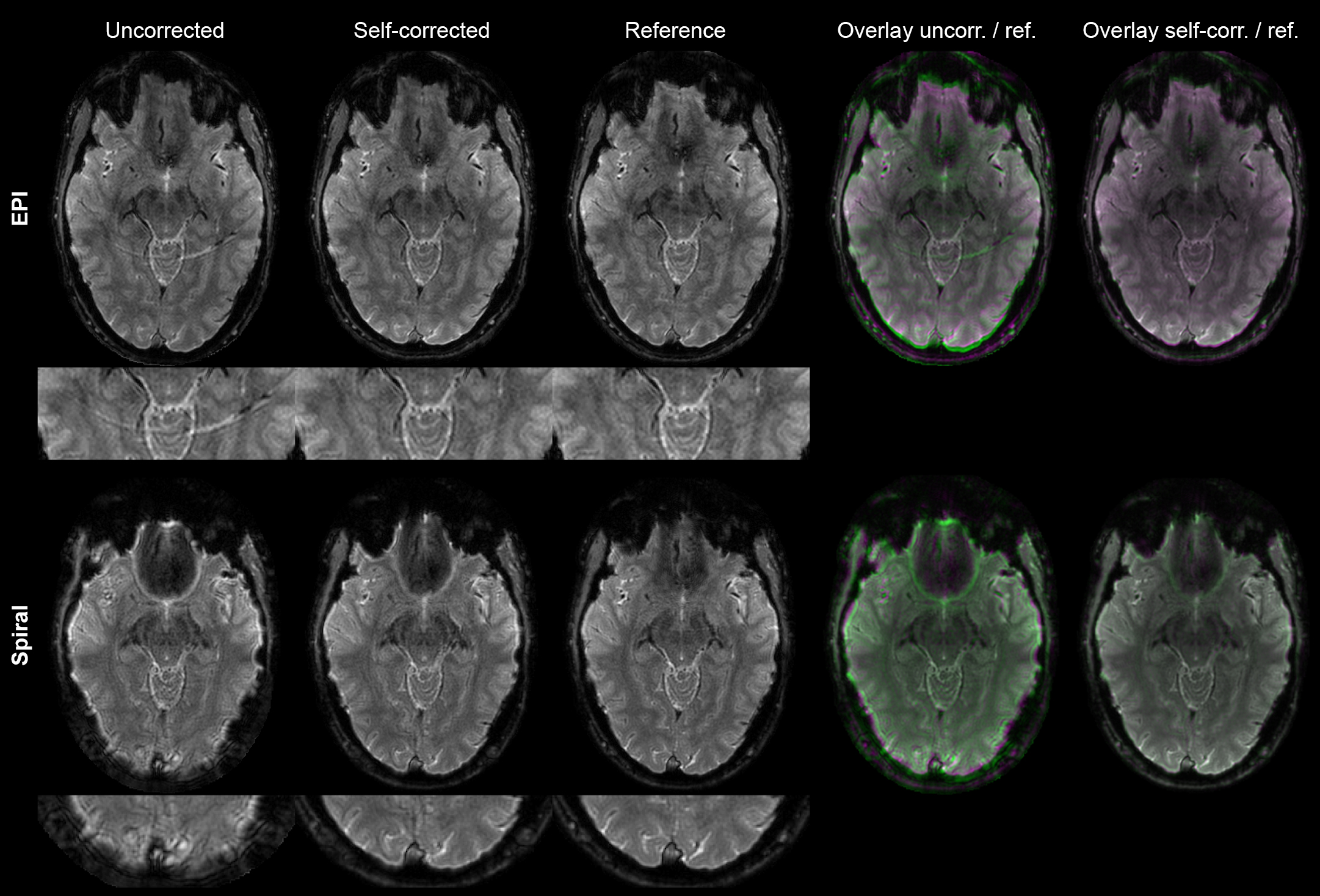
The field maps found by the proposed method converged towards the measured gradient echo field map; at the same time the cost is reduced in each iteration step until convergence (Figure 2). Also in lower slices the algorithm was capable of reducing B0 related artifacts i.e. blurring in Spiral and local image shifts and related ghosting in EPI readouts (Figure 3). The method also proved useful to correct for motion induced B0 changes, which cannot be accounted for when employing pre-acquired B0 maps (Figure 4).Discussion and Conclusion
The method significantly improved image quality for all tested cases, indicating that the proposed cost function and regularization is capable of solving the non-convex B0 estimation problem. Single-shot EPI and Spirals (R=3) without explicit k-t sampling were used as readouts, indicating that the multi-channel array implicitly encodes B0 information by requiring consistency among the sampled k-t space.Acknowledgements
No acknowledgement found.References
1. Jezzard, Balaban – Correction for Geometric Distortion in Echo Planar Images from B0 Field Variations, Magn Reson Med 1995
2. Sutton et al. – Dynamic Field Map Estimation Using a Spiral-In / Spiral-Out Acquisition, Magn Reson Med 2004
3. Andresson et al. – Modeling geometric deformations in EPI time series, Neuroimage 2001
4. Nocedal, Wright – Numerical Optimization, Springer 2006
5. Klaas P. Prüssmann et al. – Advances in Sensitivity Encoding with Arbitrary k-Space Trajectories, Magn Reson Med 2001
6. Barmet et al. – Sensitivity encoding and B0 inhomogeneity – A simulatenous reconstruction approach, Proceedings of the ISMRM 2005
7. Funai et al. – Regularized Field Map Estimation in MRI, IEEE Trans Med Imaging 2010
8. Patzig et al. - An Advanced Optimization Strategy for Joint Estimation of Object and B0, Proceedings of the ISMRM 2018
9. Ma et al. – Implicit Regularization in Nonconvex Statistical Estimation: Gradient Descent Converges Linearly for Phase Retrievel, Matrix Completion, and Blind Deconvolution, Foundations of Computational Mathematics 2019
10. Brunner et al. – Integration of field monitoring for neuroscientific applications – SNR, acceleration and image integrity, Proceedings of the ISMRM 2018
Figures