3372
Remotely controllable phantom rotation device for cross-calibration at 7T1Biomedical Magnetic Resonance, Otto-von-Guericke University, Magdeburg, Germany, 2Institute for Medical Engineering, Otto-von-Guericke University, Magdeburg, Germany, 3Department of Mechanical Engineering, Otto-von-Guericke University, Magdeburg, Germany, 4German Center for Neurodegenerative Disease, Magdeburg, Germany, 5Center for Behavioral Brain Sciences, Magdeburg, Germany, 6Leibniz Institute for Neurobiology, Magdeburg, Germany
Synopsis
A low-cost rotation device was designed and built to enable remotely controllable phantom movements. With the device, motions are highly reproducible. For cross-calibrations of external tracking systems, it prevents table movement or the need to move the phantom by hand from inside the scanner during the calibration, reduces the overall calibration duration, and provides similar calibration performance compared to the freehand approach performed by an expert. The CAD model was made publically available.
Introduction
Precise motion tracking with optical systems enables prospectively motion-corrected, ultra-high resolution MRI1. These external systems detect motion within their coordinate systems. To transform the estimates into the MR reference frame a cross-calibration is required2. During calibration, prescribed motion trajectories (commonly 180°-rotations) are performed and recorded in both coordinate systems to estimate the transformation. Errors in the cross-calibration can reduce the motion correction performance3. Due to the long bore of a 7-Tesla MRI, phantom rotations are either performed by an operator staying inside the scanner during the entire calibration or by moving the table out, rotating the phantom, and re-positioning the table. Imperfect re-positioning can result in calibration errors. To overcome this, a remotely controllable rotation device (RotDev) was built and validated regarding its motion reproducibility and cross-calibration performance.Methods
All calibrations were performed by a motion correction expert (5+years’ experience) on a 7-Tesla system (Siemens Healthineers, Germany) with an 8-channel head-coil (RAPID Biomedical, Germany). A GRE-based cross-calibration sequence (TA=0:30min, 3mm voxel size) was acquired before and after the rotation. This sequence provided estimates of the performed motion and residual displacement after motion correction induced by cross-calibration imperfections2. Freehand rotations were performed by moving the table in and out. The initial cross-calibration was derived by detuning a previously obtained calibration (translation components rounded to the next integer, rotational components altered by 0.5-1.25°).Rotation device
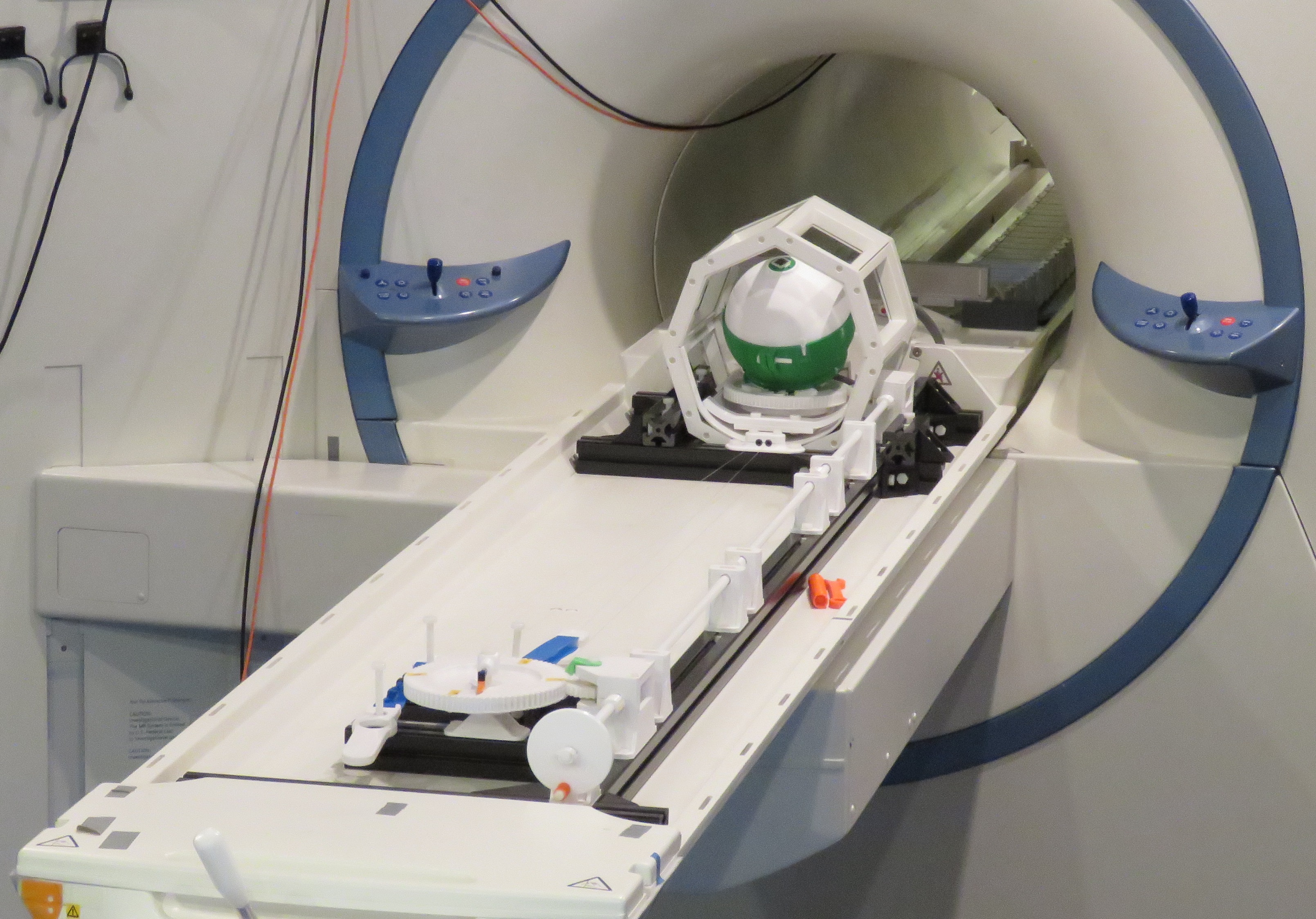
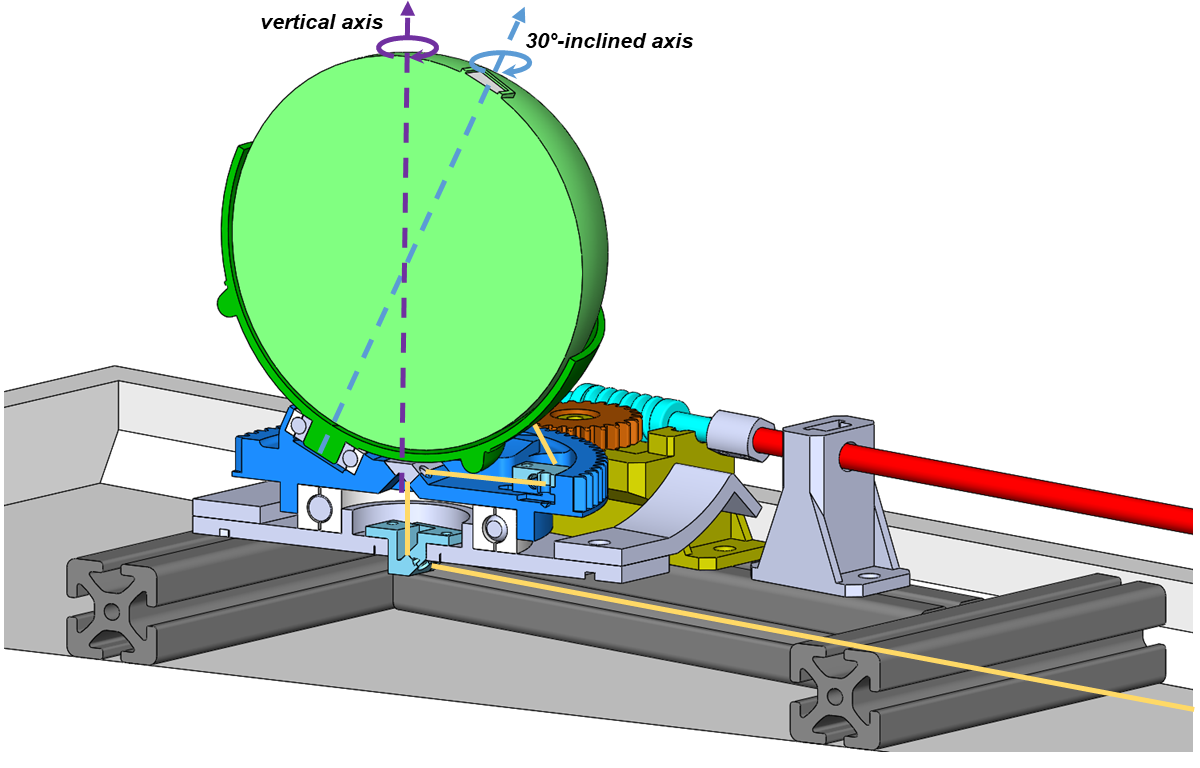
To enable remotely controlled rotations about two axes, hence to make table movement obsolete, an MRI-compatible RotDev was designed to fit into the narrow head-coil (see Fig.1). The CAD model4 and construction details5 of the low-cost device (~170€) are publicly available. Within the device, the phantom is positioned 30°-inclined and rotations about two independent axes can be performed from outside the scanner: 1.) 180°-rotation about the 30°-inclined axis operated by strings, 2.) 360°-rotation about the vertical axis operated by a gear system (see Fig.2).
Motion reproducibility
To compare the precision of the freehand approach and the RotDev, five 180°-rotations were performed for each method respectively.
Cross-calibration: freehand vs rotation device
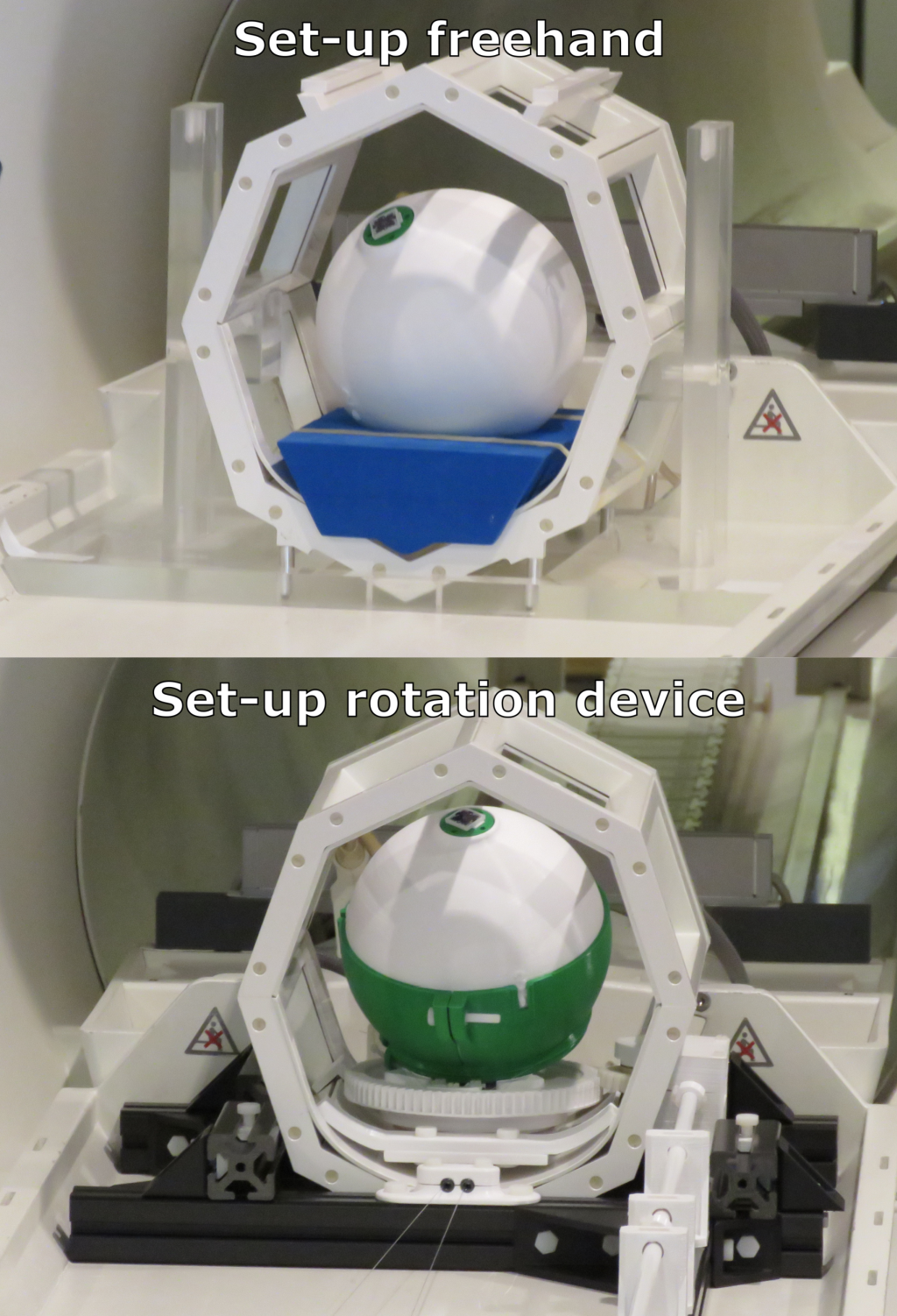
For both approaches (set-ups in Fig.3) cross-calibrations were obtained by performing eight 1-step and one 4-step calibration (both starting with the same detuned, initial transform). The final calibrations were compared for two different motions. Each motion consisted of 180°-rotations about the RotDev's two independent axis to maximize residuals.
Commonly, a single pre-motion scan cannot be re-used by multiple post-motion scans. Hence, each calibration test requires (potentially imperfect) re-positioning of the phantom and re-acquisition of the pre-motion scan. Here a workaround (see "How-to"6) is presented to estimate all residuals with respect to the same pre-motion position (workaround does not required RotDev).
Results
Motion reproducibilityThe five motions performed freehanded resulted in (178.58±1.21)° rotations. The orientation of the rotation axis differed on average 1.36° between the repeated motions. With the RotDev, the sequence estimated all rotations as exactly 180.0° with identical rotation axes.
Cross-calibration: freehand vs rotation device
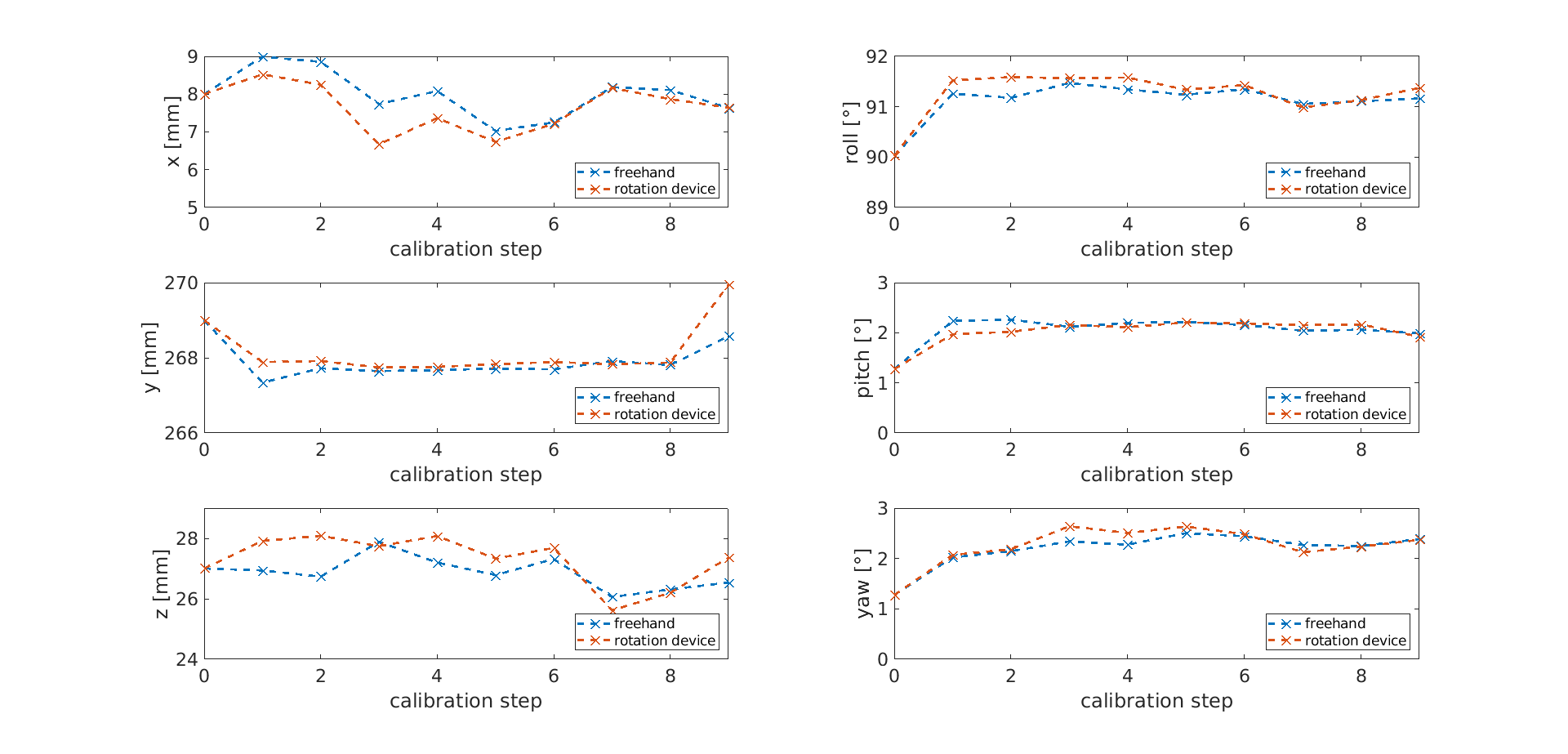
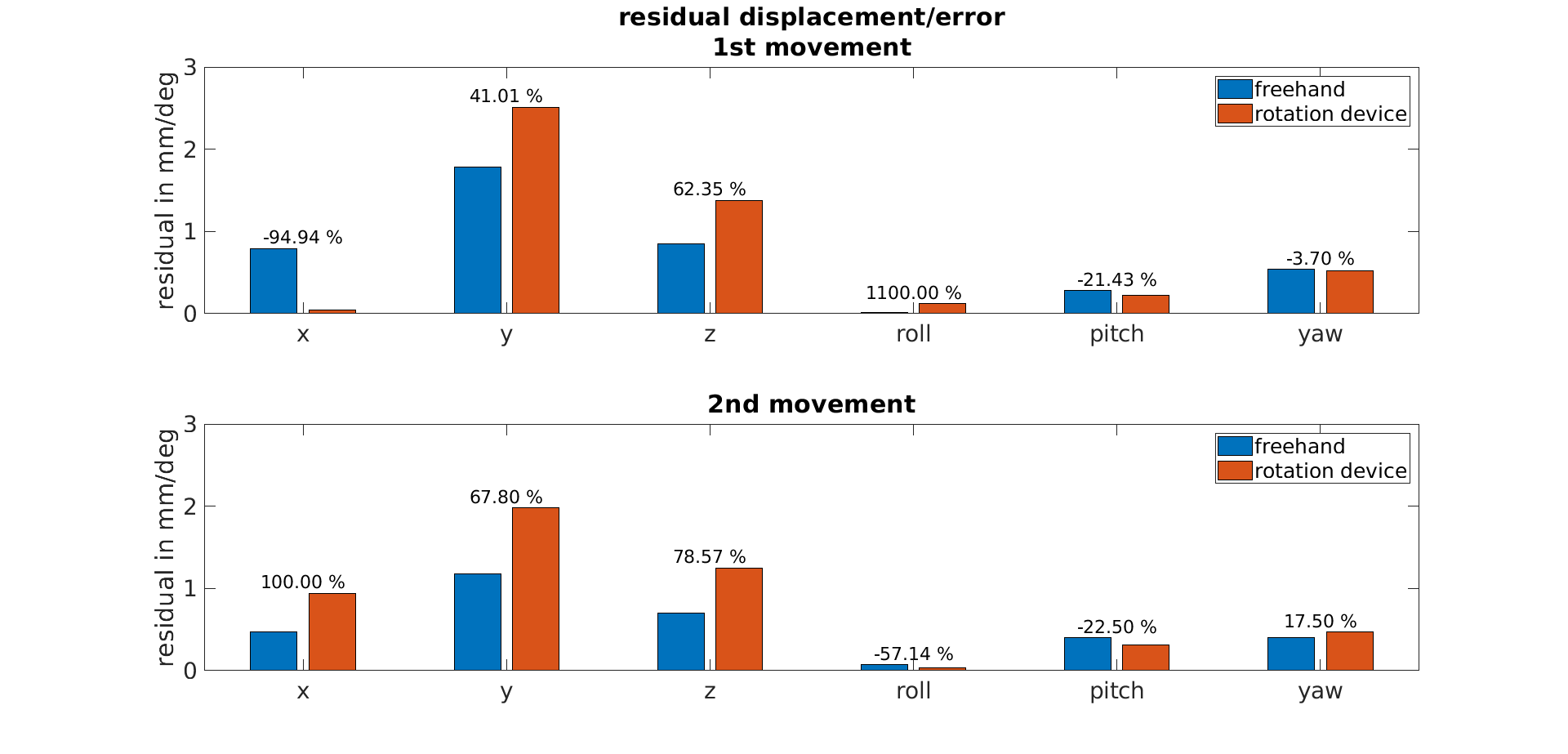
Starting from the same initial calibration, nine calibration steps were performed freehanded and with the RotDev, respectively. As shown in Fig.4, both methods resulted in similar transforms, except for the y-translation. Manual rotations allow larger angles between rotation axes than with the RotDev (fixed 30°-inclined axis), improving the algorithm’s y-translation accuracy. The residual motion estimates in Fig.5 corroborate this observation. For the two different test motions, residual translation was greater with the RotDev in five out of six cases compared to the freehand approach, while for residual rotations, the freehand approach was outperformed in four out of six cases. Thus, the observed residuals suggest that no approach was superior to the other with respect to the final cross-calibration. With the RotDev, the overall calibration duration was approximately half the time required for a freehanded-performed calibration (31 min vs. 56 min), although the set-up of the RotDev takes longer than the freehand approach (10 min vs. 5 min).
Discussion
Within the strict requirements on material and available space, a remotely controllable rotation device with two independent rotation axes was developed. The RotDev enables reproducible motion (precision$$$\leq$$$0.1°, equivalent to detection accuracy), ergo, outperforms the freehand approach.Besides cross-calibration the device could be used for phantom motion during motion-corrected scanning or to precisely change the sample-B0 field alignment, e.g. for QSM. Freehand and RotDev resulted in similar cross-calibration performance suggesting no considerable re-positioning error of the table occurred during freehand calibration, and the calibration algorithm is robust against imperfect rotations. In the future, the phantom axis of the RotDev will be inclined further to improve y-translation calibration.
In summary, with the RotDev cross-calibrations can be performed faster, easier, and motions are highly reproducible with similar cross-calibration performace compared to very experienced users. Thus, less experienced users might be able to get better calibration results, hence, lowering the learning process to perform a cross-calibration successfully. With an increase rotation axis inclination, the accuracy of the calibration could be further improved.
Conclusion
The low-cost RotDev (publicly available CAD-model4) enables highly reproducible phantom rotations, prevents table movement or the need to move the phantom manually from inside the scanner during the calibration, reduces the overall calibration duration, and provides similar calibration performance compared to the freehand approach done by an expert.Acknowledgements
This work was supported by the NIH, grant number 1R01-DA021146.References
1. Stucht D, Danishad KA, Schulze P, Godenschweger F, Zaitsev M, Speck O. Highest Resolution In Vivo Human Brain MRI Using Prospective Motion Correction. PLoS ONE. 2015;10(7):e0133921. doi: 10.1371/journal.pone.0133921.
2. Zaitsev M, Dold C, Sakas G, Hennig J, Speck O. Magnetic resonance imaging of freely moving objects: prospective real-time motion correction using an external optical motion tracking system. Neuroimage. 2006;31(3):1038–1050. doi: 10.1016/j.neuroimage.2006.01.039.
3. Zahneisen B, Keating B, Ernst T. Propagation of calibration errors in prospective motion correction using external tracking. Magn Reson Med. 2014;72(2):381–388. doi: 10.1002/mrm.24943.
4. http://www.bmmr.ovgu.de/RotDev.html
5. Odenbach R, Thoma N, Mattern H, Friebe M. Remotely controllable phantom rotation system for ultra-high field MRI to improve Cross Calibration. Current Directions in Biomedical Engineering. 2019;5(1):429–431 doi: 10.1515/cdbme-2019-1570538325.
6. http://www.bmmr.ovgu.de/CCC.html
Figures