3308
Simultaneous acquisition of multi-phase offset for rapid imaging in MR elastography (SAMURAI-MRE) using a multi-echo sequence1Department of Radiological Sciences, Graduate School of Human Health Sciences, Tokyo Metropolitan University, Tokyo, Japan, 2Office of Radiation Technology, Keio University Hospital, Tokyo, Japan, 3Health Research Institute, National Institute of Advanced Industrial Science and Technology, Ibaraki, Japan, 4Department of Mechanical Engineering, Tokyo Denki University, Tokyo, Japan, 5Department of sport and Health Sciences, Faculty of Human Sciences, University of East Asia, Yamaguchi, Japan, 6System Emotional Science, Graduate School of Medicine and Pharmaceutical Sciences, University of Toyama, Toyama, Japan
Synopsis
MR elastography (MRE) requires acquisitions of multiple phase offset images. Patient movement between acquisitions of phase offset images is not only difficult to be detected, but also leads to calculate shear modulus incorrectly. To resolve this problem, we present a novel MRE technique that can acquire multiple phase offset images simultaneously (SAMURAI-MRE) using a motion-encoding gradient (MEG)-less multi-echo sequence. MRE images obtained at spin-echo (SE)- and gradient-echo (GRE)-based SAMURAI-MRE were compared with those at conventional SE- and GRE-based MEG-less multi-echo MRE. The results demonstrate that it is possible to perform SAMURAI-MRE, and SE-based SAMURAI-MRE was superior to GRE-based SAMURAI-MRE.
INTRODUCTION
MR elastography (MRE) is a phase-contrast technique that provides information about mechanical properties, such as shear modulus of tissue, by visualizing and analyzing mechanical shear vibrations propagated to the tissue.1 Tissue displacements attributable to vibrations are encoded as phase shifts in an MR phase image by using bipolar gradient lobes in a motion-encoding gradient (MEG). MRE requires acquisitions at multiple phase offsets (typically 4–8 phase offsets) which indicated as relationship with wave motion and MEG, in order to show the propagation of the wave and to permit processing of the data through time.Patient movement during acquisition can be detected as a motion artefact on an MR image. However, it is difficult to detect patient movement between acquisitions, because this movement is not appeared as an artefact. In MRE, if the patient moves between acquisitions of multiple phase offset images, calculated shear modulus results in incorrectly.
To resolve this problem, this study presents a novel technique that can acquire multiple phase offset images simultaneously. This study names our technique a “simultaneous acquisition of multi-phase offset for rapid imaging in MR elastography” (SAMURAI-MRE), and investigated the accuracy of SAMURAI-MRE by working with the phantom and human subjects.
METHODS
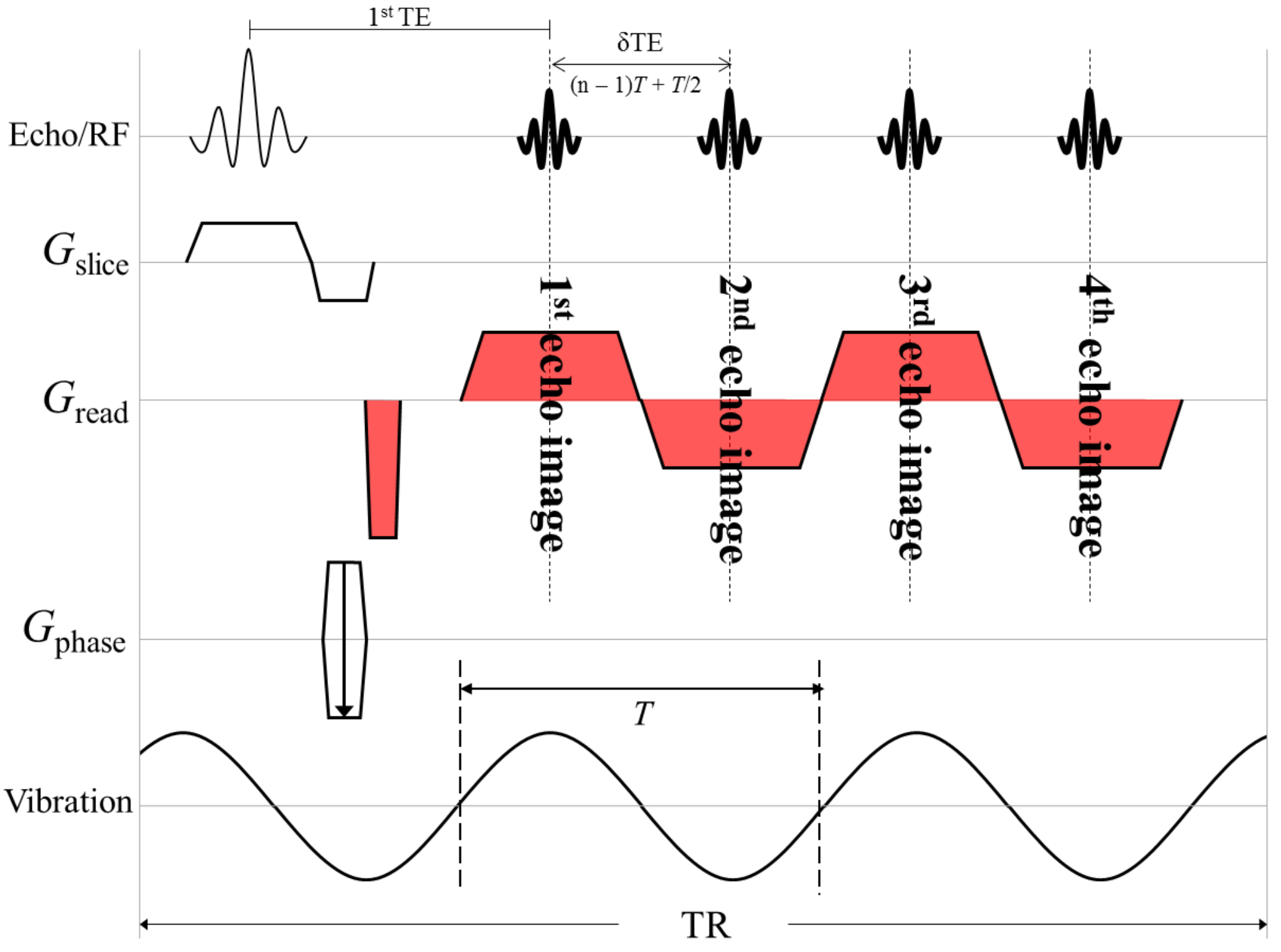
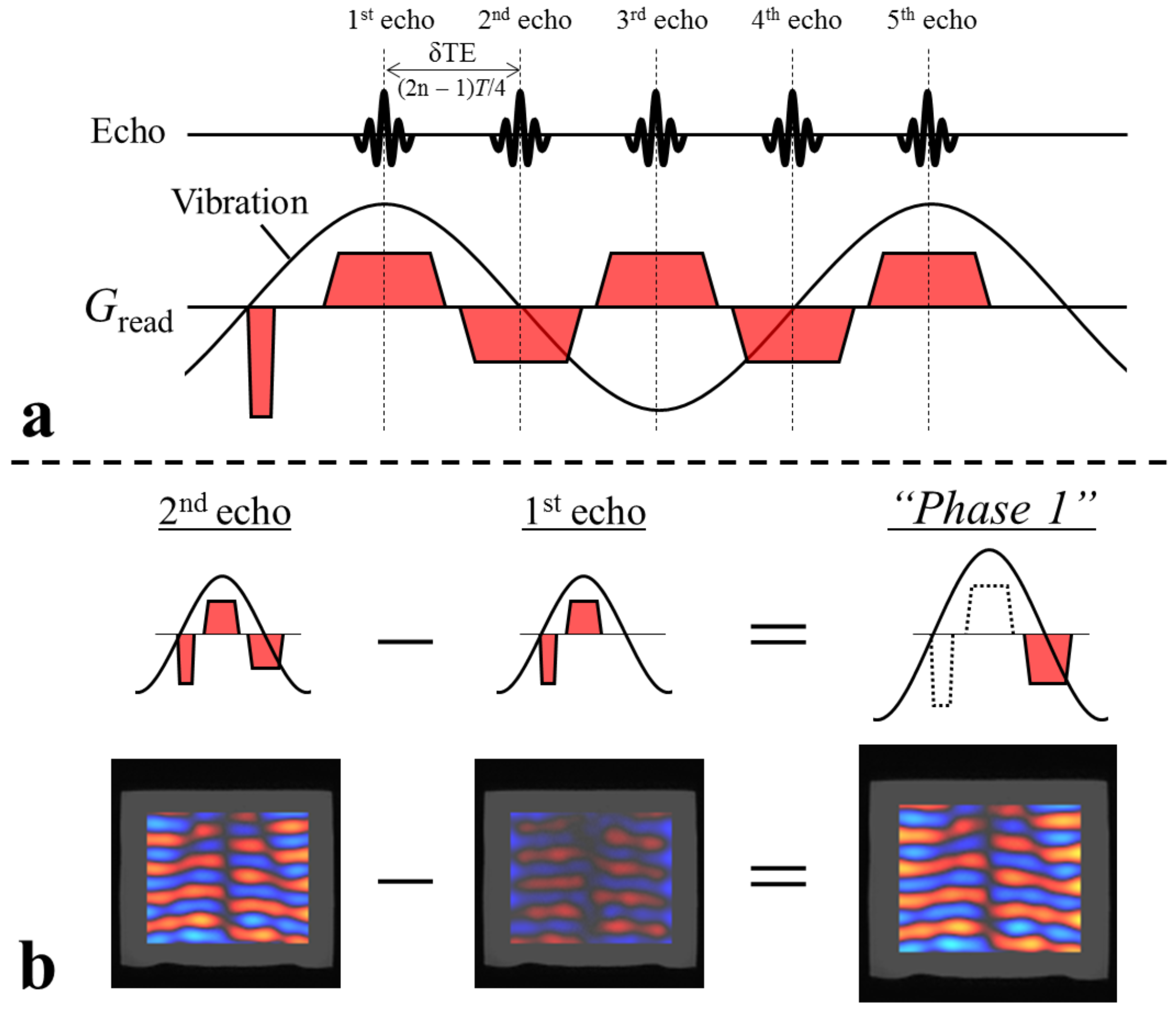
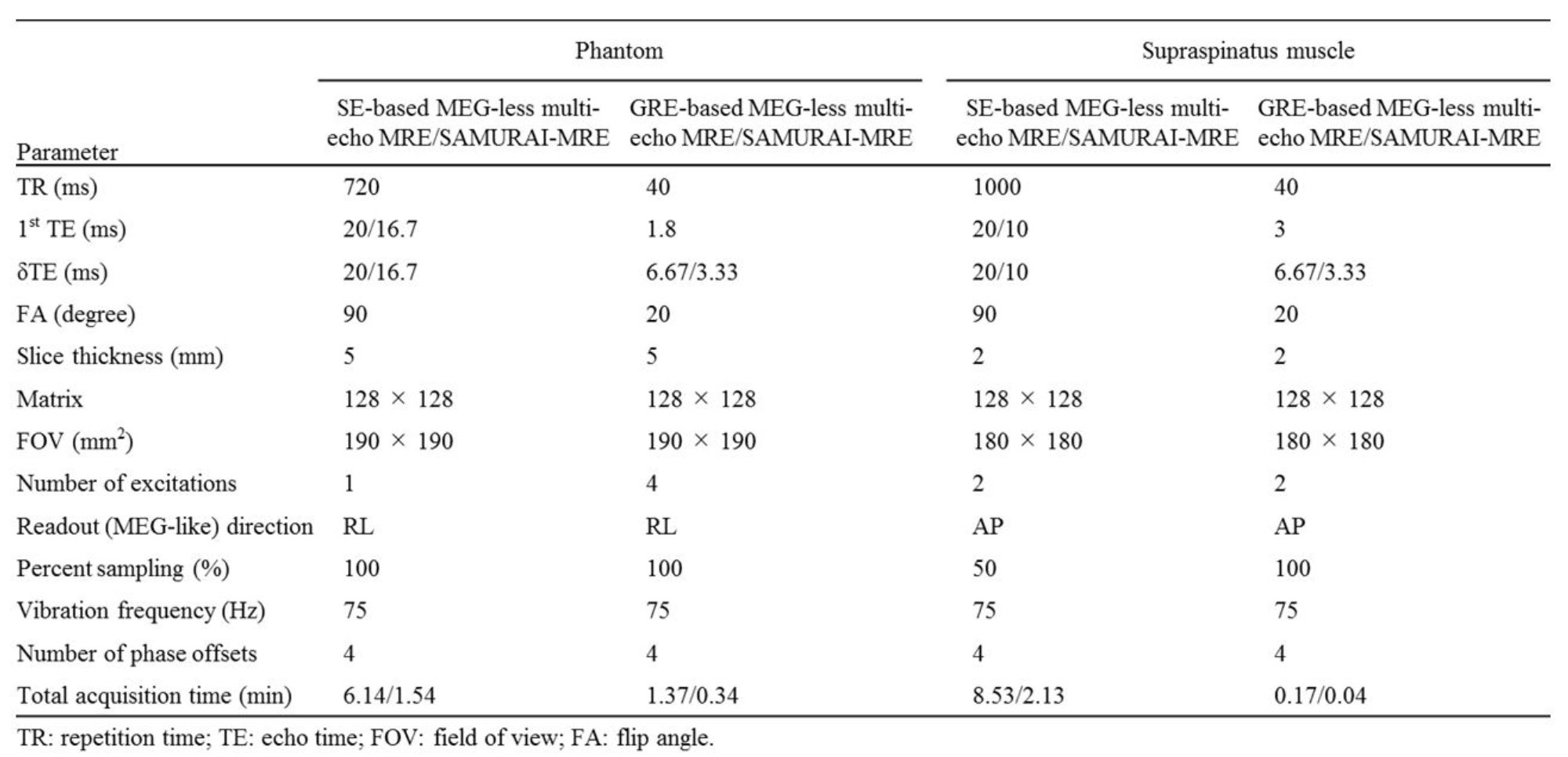
All MRE experiments were performed on a clinical MR imager (Achieva 3.0T; Philips Healthcare, Best, The Netherlands) using a surface coil. This study used custom-designed pneumatic wave transducer (vibration pad) made by a three-dimensional (3D) printer (3D touch, 3D Systems, Inc., Rock Hill, SC, USA). SAMURAI-MRE is based on a MEG-less multi-echo sequence.2 In a MEG-less multi-echo sequence, readout gradient lobes achieve a similar function to MEG (MEG-like effect). Normally, to obtain maximum MEG-like effects, readout gradient lobes are synchronized with vibration, in other words, the TE-interval of multi echoes (δTE) is adjusted to following condition δTE = (n – 1)T + T/2, (n = 1, 2, 3, ⋯) [1], where T is the period of vibration (Fig. 1). On the other hands, SAMURAI-MRE can be performed by acquiring multi-echo unsynchronized with readout gradient lobes and vibration; specific condition of δTE differs depending on the number of phase offsets. Moreover, the number of echoes should set adding 1 to the number of phase offsets in SAMURAI-MRE. For example, in the case of 4 phase offsets in SAMURAI-MRE, δTE is set the following condition δTE = (2n – 1)T/4, (n = 1, 2, 3, ⋯) [2], and 5 echoes are required (Fig. 2a). After acquired images are processed by bandpass filtering to suppress random noises and background phase variations, multiple phase offset images are generated from difference acquired images between adjacent two echo data (Fig. 2b). This study performed for the acrylamide phantom and supraspinatus muscle in three subjects using following 4 kinds of acquisition methods: conventional MEG-less multi-echo MRE with 1) spin-echo (SE)- and 2) gradient-echo (GRE)-based sequences, and SAMURAI-MRE with 3) SE- and 4) GRE-based sequences. Number of phase offsets were set at 4; thus, the acquisition time for SAMURAI-MRE is 1/4 compared with a conventional MEG-less multi-echo MRE. Additional acquisition parameters appear in Figure 3. In the phantom, Pearson’s correlation analysis was performed, to assess the differences of each acquisition method in shear modulus. The Pearson’s correlation coefficient was calculated using voxel-wise data for elastograms between each acquisition method and SE-based MEG-less multi-echo MRE. In the volunteer study, the Pearson’s correlation analysis was not performed, because the accuracy of each method is unknown due to various factors included patient movement.RESULTS
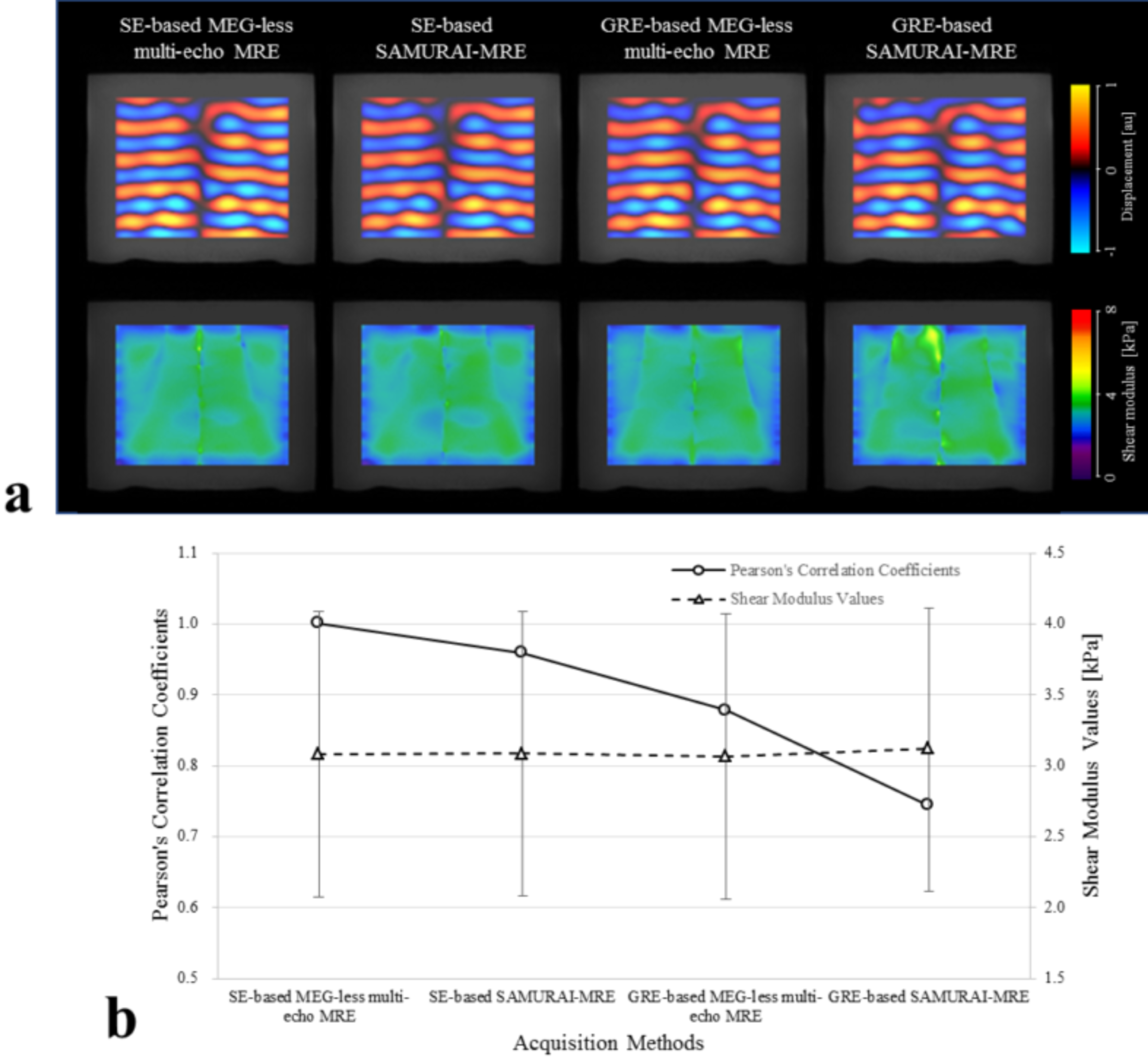
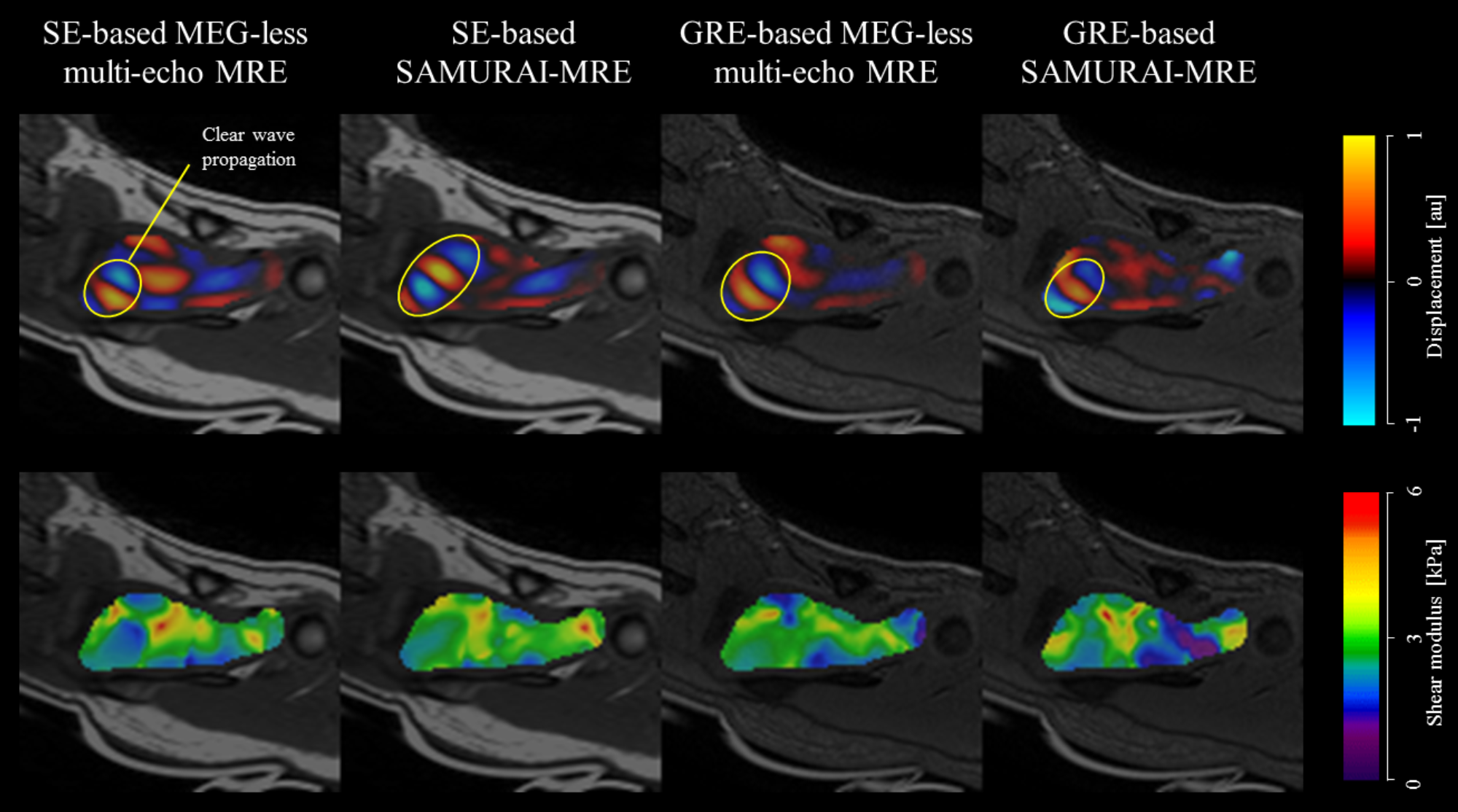
The elastogram of the phantom at GRE-based SAMURAI-MRE was changed compared with that of other methods (Fig. 4a); the Pearson’s correlation coefficient was lowest at GRE-based SAMURAI-MRE (0.74), and that was highest at SE-based SAMURAI-MRE (0.96), as shown Figure 4b. In the supraspinatus muscle, the wave image showed clear wave propagation especially at SE-based SAMURAI-MRE, and unclear wave propagation at GRE-based SAMURAI-MRE (Fig. 5).DISCUSSION
GRE-based sequences increase phase wrapping due to phase shifts resulting from magnetic field inhomogeneities compared with SE based-sequences, because those phase shifts are not cancelled at the center of the GRE as they are in SE-based sequences. Moreover, in GRE-based multi-echo sequences, phase wrapping due to them increase with later generated echo (1st echo < 2nd echo < 3rd echo, etc.). Since multiple phase offset images are generated from difference between adjacent two echo data in SAMURAI-MRE, the degree of influence due to phase wrapping is different at each phase offset image. Therefore, the wave image and elastogram would be low quality in GRE-based SAMURAI-MRE. On the other hands, in SE-based SAMURAI-MRE with little phase wrapping, the quality of wave image and elastogram may be high due to benefit from less patient movement by simultaneous acquisition of multiple phase offset images.CONCLUSION
The results demonstrate that it is possible to perform MRE using our novel technique (SAMURAI-MRE) that can acquire multiple phase offset images simultaneously, and MRE images at SE-based SAMURAI-MRE was more superior than those at GRE-based SAMURAI-MRE. SAMURAI-MRE may improve the accuracy of shear modulus calculation by reducing patient movement. In addition, since SAMURAI-MRE is based on simple multi-echo method built into conventional MRI, it can be a useful technique for the clinical application of MRE.Acknowledgements
No acknowledgement found.References
1. Muthupillai R, Lomas DJ, Rossman PJ, et al. Magnetic resonance elastography by direct visualization of propagating acoustic strain waves. Science 1995;269(5232):1854-1857.
2. Numano T, Mizuhara K, Hata J, et al. A simple method for MR elastography: a gradient-echo type multi-echo sequence. Magn Reson Imaging 2015;33(1):31-37.
Figures