1296
Accelerated 4D-flow MRI using Machine Learning (ML) Enabled Three Point Flow Encoding1Department of Medical Physics, University of Wisconsin, Madison, WI, United States, 2Department of Physics, University of Wisconsin, Madison, WI, United States, 3Department of Radiology, University of Wisconsin, Madison, WI, United States, 4Department of Medical Physics, University of Wisconsin, Middleton, WI, United States
Synopsis
4D-flow MRI suffers from long scan time due to a minimum of four velocity encodings necessary to solve for three velocity components and the reference background phase. We examine the feasibility of using machine learning (ML) to determine the background phase and hence three velocity components from only three flow encodings. The results show that ML is capable of estimating three-directional velocities from three flow encodings with high accuracy (1.5%-3.8% velocity underestimation) and high precision (R2=0.975). These findings indicate that 4D-flow MRI can be accelerated without requiring a dedicated reference scan, with a scan time reduction of 25%.
Introduction
4D-flow MRI suffers from long scan times resulting from necessary multiple velocity encodings and cardiac gating. At minimum, four encodings are required to solve voxel-wise for three velocity components and a reference background phase.1 The background phase is spatially complex in spoiled gradient echo (GRE) based 4D-flow; however, bSSFP-based flow imaging without phase reference has been achieved in the neck using background phase fitting.2 This has not been extended to spoiled-GRE imaging or other complex organs. Yet, recent progress3 in the related problem of phase estimation in quantitative susceptibility mapping (QSM) suggests machine learning may be capable of learning spatially complex phase fields. Given this, a convolutional neural network (CNN) has potential to estimate the background phase from three flow encodings, without requiring a dedicated fourth reference scan. Here, we examine the optimal strategies for using a CNN to accurately determine the background phase and thus the three velocity components from only three flow encodings, potentially reducing the scan time of 4D-flow MRI by 25%. In particular, we investigate strategies to ensure unbiased estimation in vessels and interrogate the errors from the method.Methods
Data was included from subjects undergoing whole-brain 4D-flow4 with 4-point reference encoding and 0.7mm isotropic resolution. 3-directional velocity components were determined using all 4 encodings (called ‘4-point velocities’) using standard reconstruction and eddy-current phase corrections. 112 subjects were used for training, while 28 subjects were used for validation and testing. A fully 3D CNN with U-net5 architecture was used which takes randomly selected 64x64x64 sub-volumes. The complex-valued images of the 3 flow encodings were used as an input for the CNN, which learned to estimate 3 velocity components (called ‘3-point velocities’). We investigated two weighted least squares loss functions: one in which the error was weighted by magnitude and another in which the error was weighted by the pseudo complex-difference image (CD). The magnitude weight equalizes the velocity noise errors, which is higher in areas of low signal (e.g. air). The pseudo complex difference additionally weights the data by velocity magnitude aiding in the class imbalance between vessels and background tissue. Following training, 3-directional components of the 3-point and 4-point velocities were compared voxel-wise within vessels to determine their correlation and agreement. The comparison was also performed outside the vessels to examine possible areas of higher discrepancies.Results
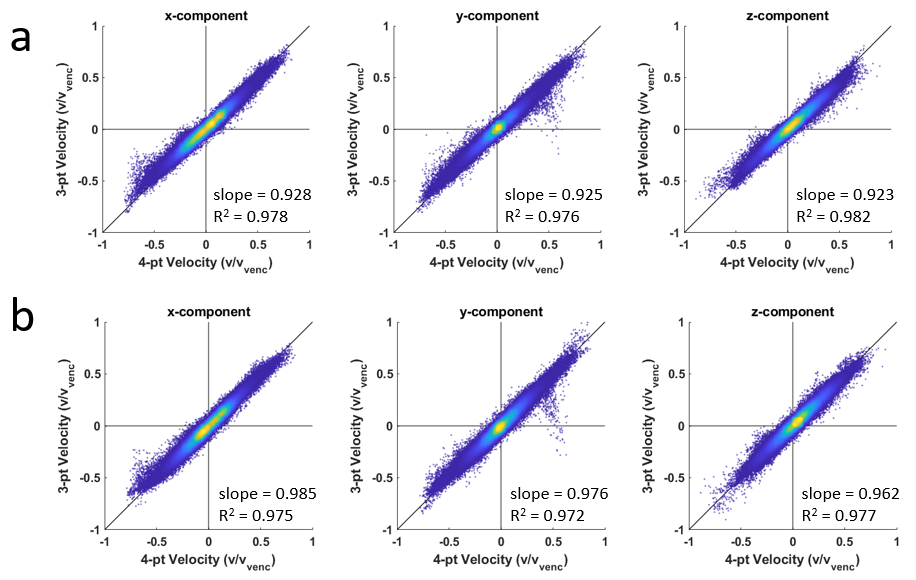
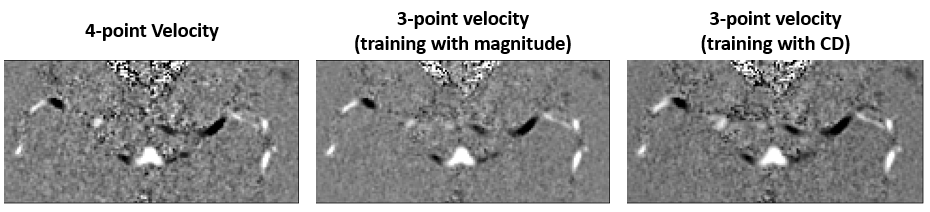
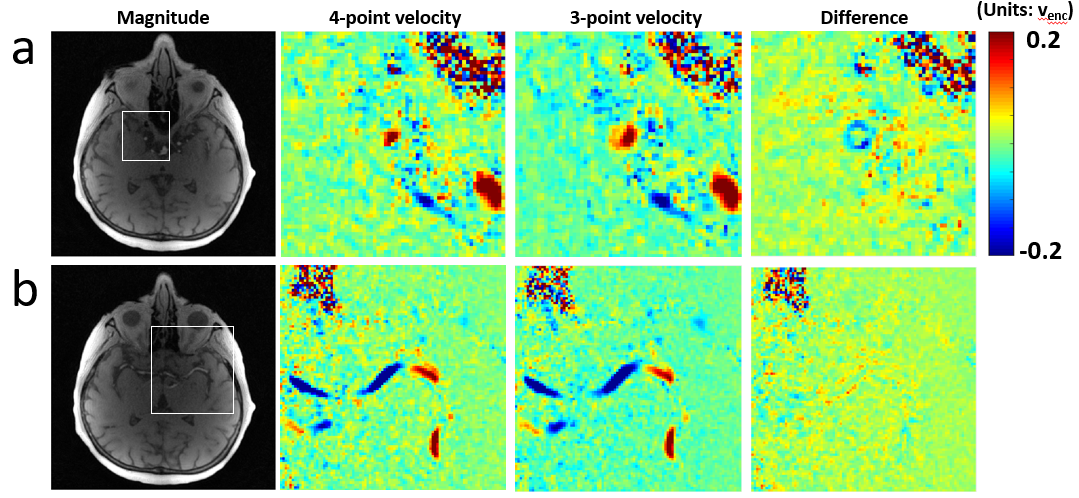
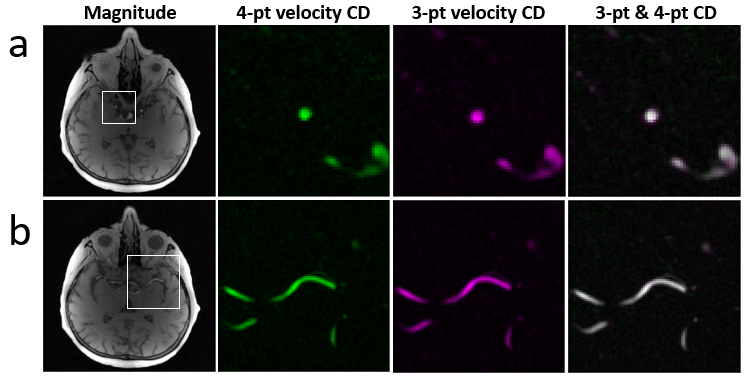
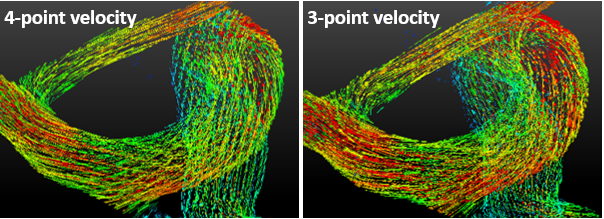
The standard 4-point velocities and ML-estimated 3-point velocities showed high agreement, indicating the CNN successfully estimated the background phase and 3 velocity components from three flow encodings only (Figure 1). There were high correlations (~0.98) between 3-pt and 4-pt velocities regardless of the choice of loss function, indicating the high precision of ML-estimated velocities. Accuracy of the 3-point velocities was dependent on the choice of loss function. With magnitude weighting alone, velocities were slightly underestimated (slope=0.925). This finding was concomitant with an observed reduction in the background signal noise levels and a small degree of blurring in the velocity images (Figure 2). When the training loss was replaced with CD-weighted least squares, the underestimation was significantly reduced from 7.5% to 2.9% (slope=0.971). CD-weighted images also show similar background noise levels and resolution to the input 4-point velocity images. The difference map between the 3-pt and 4-pt velocities show that the two velocities are in high agreement within vessels but tend to show small discrepancies immediately outside large vessels, such as internal carotid arteries (ICA) and middle cerebral arteries (MCA) (Figure 3). However, the velocity discrepancies did not translate to discrepancies in flow-derived angiogram, as the velocity error was suppressed by the magnitude image during angiogram generation (Figure 4).Discussion
Our results demonstrate that CNNs can estimate velocities in 4D-flow using only three flow encodings without utilizing the reference encoding. These results have potential implications that 4D-flow MRI can be performed without a dedicated reference encoding, resulting in 25% reduction in scan time. While the ML-estimated 3-pt velocities show slight underestimation in velocities and hence blurring in the velocity images, such errors were significantly reduced with greater weighting of vessels during training. With an optimized choice of vessel weighting, the discrepancy between the 3-point and 4-point velocities can potentially be reduced within the velocity noise of the 4D-flow MRI.Acknowledgements
No acknowledgement found.References
1. Johnson et al. MRM 2012 63(2): 349-355.
2. Ebbers et al. MRM 2001; 45(5):872-879.
3. Rasmussen et al. bioRxiv 278036.
4. Gu et al. AJNR 2005 26(4):743-9
5. Ronneberger et al. arXiv: 1505.04597 7
Figures