0679
Joint 3D parameter mapping and motion correction using a kernel low rank method with offline training1Electrical Engineering, University at Buffalo, SUNY, Buffalo, NY, United States, 2Biomedical Engineering, Program of Advanced Musculoskeletal Imaging (PAMI), Cleveland Clinic, OH, United States, 3Biomedical Engineering, University at Buffalo, SUNY, Buffalo, NY, United States, 4Paul C Lauterbur Research Center for Biomedical Imaging, Shenzhen institutes of Advanced Technology, Shenzhen, China
Synopsis
Magnetic resonance parameter mapping (e.g. T1, T2, T2* and T1ρ) has shown potential in quantitative assessment while the clinical applications are limited by long acquisition time especially in 3D acquisition. In our previous work, we use single-exponential model to generate off-line single-exponential training data instead of low resolution training data, which reduced the reconstruction time. In clinical use, when motion is introduced in acquisition, single-exponential model is not satisfied and the reconstruction may fail. With this motivation, this abstract alternatively reconstruct the images and correct motion in 3D parameter mapping.
Introduction
Magnetic resonance parameter mapping (e.g. T1, T2, T2* and T1ρ) has shown potential in quantitative assessment while the clinical applications are limited by long acquisition time [1]. During the past few years, compressed sensing [2] methods have been studied to accelerate parameter mapping [3-5]. Among them, the kernel low rank (KLR) method has demonstrated its success in quantitative imaging. In 3D high resolution parameter mapping, the KLR method requires a long training time. Since the training using low-resolution images is performed online (after data acquisition), such a long training time makes the method less practical. On the other hand, in our previous work, we used simulated exponential curves for training. Such training can be performed offline (before data acquisition), which does not prolong the reconstruction time. However, the pre-trained KLR method is highly sensitive to motion which is typically unavoidable in clinical scans. This abstract aims to address the issue of motion in offline trained KLR method by joint image reconstruction and motion correction for 3D parameter mapping.Method
The relationship between the echo images $$$I_{m}$$$ and the measurements $$$d_{m}$$$ can be represented as: $$$d_{m}=F_{m}I_{m}+n_{m}$$$, where $$$F_{m}$$$ is Fourier operator with embedded sampling pattern for each echo, $$$n_{m}$$$ is noise in measurements and m the index of the echo. In MR parameter mapping, the images $$$I_{m}$$$ can be modeled as $$$I_{m}=P(\theta)\mu$$$, where $$$P(\theta)$$$ is a parametric function of θ and µ is the parameter linearly related to images. For example in T1ρ imaging, T1ρ map is obtained by using an exponential model: $$$I_{m}\propto e^{-TSL(m)/T1\rho}$$$. Considering motion effects, the model becomes $$$\phi_{m}\circ I_{m}\propto e^{-TSL(m)/T1\rho}$$$, where $$$\phi_{m}$$$ is a transformation matrix which aligns the image with the reference. The final registered images $$$\phi_{m}\circ I_{m}$$$ can be reconstructed by alternating between these two steps iteratively: 1. Registration by solving an optimization problem for the deformation matrix . 2. Reconstruction by solving another optimization problem using pre-trained KLR.1. Registration. We select the first echo $$$I_{1}$$$ as the reference image for motion correction. The registration problem can be formulated as: $$\phi_{m}=arg\min_{\phi_{m}}\frac{1}{N}\sum_{x\in\Omega_{F}}(I_{1}(x)-\phi_{m}\circ I_{m}(x))^{2}$$
where $$$\Omega_{F}$$$ represents the reference, N represents the number of sampled voxels, and x is are the voxels that are randomly selected within the region of interest. The solution to this problem can be found in [7].
2. Reconstruction. This step is to reconstruct the final motion-corrected images $$$I'_{m}=\phi_{m}\circ I_{m}$$$, which are given by the solution to: $$\tau=\min_{\tau}rank(\psi(\tau)) s.t. d_{m}=F_{m}(\phi_m^{-1}\circ A(\tau))$$
where $$$\tau$$$ represents the vector of temporal signals at each spatial location, A is transform the vectors back to images. The solution to this problem can be found in [8]. Different from original work, the model is pre-trained here using simulated exponential curves. Since the transformation matrix was obtained from step 1. The temporal signals $$$\tau$$$ should ideally follow the parametric model, which is $$$P(\theta)\mu$$$.
Results
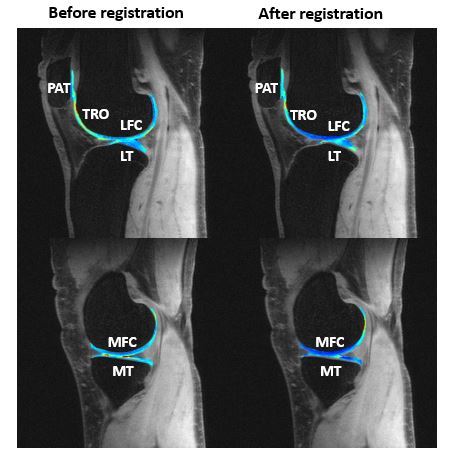
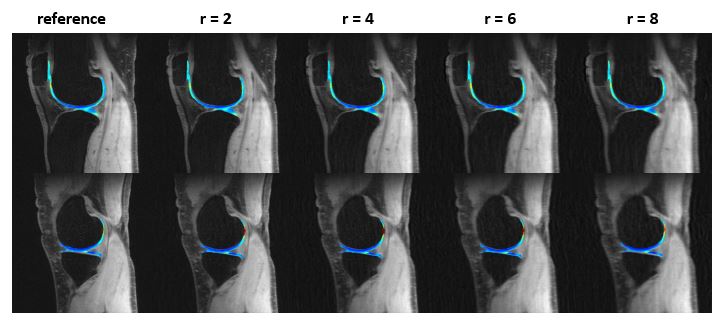
The proposed method was evaluated using a set of 3D T1ρ in vivo human knee data from a 3 Tesla scanner (General Electric Healthcare, Milwaukee, WI, USA). The data was acquired using a magnetization-prepared angle-modulated partitioned k-space spoiled gradient echo snapshots (MAPSS) T1ρ quantification pulse sequence with spin-lock times (TSLs) of 0, 2, 4, 8, 12, 20, 40, 80ms, Spin-lock frequency of 500Hz, matrix size of 384×384×8×60 (PE×FE×Echo×Slice). Fully sampled data was retrospectively undersampled using a 2D variable density sampling pattern in phase-encoding and slice encoding direction. Proposed method was used to reconstruct the desired images.Figure 1 shows the fully sampled T1ρ maps within region-of-interest (PAT, TRO, LFC, LT, MFC ,MT) overlaying on echo images. Left side is original acquisition and right side is estimation after motion registration. Motion artifacts can be viewed in original results. Figure 2 shows the reconstruction results with reduction factor of 2, 4, 6 and 8 compared to gold standard, where we use corrected fully sampled image as gold standard. The results showed great agreement between reconstruction and reference T1ρ maps. The reconstruction time for this 3D data is around 25 minutes.
Conclusion
In this abstract, we proposed a joint reconstruction and motion correction approach to improving KLR for accelerated 3D parameter mapping. The result showed the potential feasibility of our proposed method in 3D parameter mapping. Future work will improve the offline training by augmenting the simulated training data.Acknowledgements
This work is supported in part by the National Institute of Health U01EB023829.References
[1] Cheng H, Stikov N, Ghugre N, Wright G. Practical medical applications of quantitative MR relaxometry. J. Magn. Reson. Imag. 2012; 36(4):805-824.
[2] Lustig M, Donoho D, Pauly J. Sparse MRI: The application of compressed sensing for rapid MR imaging. Magn. Reson. Med. 2007; 58(6):1182-1195.
[3] Zhu Y, Zhang Q, Liu Q, Wang Y, Liu X, Zheng H, Liang D, Yuan J. PANDA-T1ρ: Integrating principlal component analysis and dictionary learning for fast T1ρ mapping. Magn. Reson. Med. 2014; 73(1):263-272.
[4] Zhou Y, Pandit P, Pedoia V, Rivoire J, Wang Y, Liang D, Li X, Ying L. Accelerating of T1ρ cartilage imaging using compressed sensing with iterative locally adapted support detection and JSENSE. Magn. Reson. Med. 2016; 75(4):1617-1629.
[5] Pandit P, Rivoire J, King K, Li X. Accelerated T1ρ acquisition for knee cartilage quantification using compressed sensing and data-driven parallel imaging: A feasibility study. Magn. Reson. Med. 2015; 75(3): 1256-1261.
[6] Zhang C, Nakarmi U, Li H, Zhou Y, Liang D, Ying L. Accelerating T2 mapping using a self-trained kernel PCA model. International Society for Magnetic Resonance in Medicine 2018, Paris.
[7] Klein S, Staring M, Murphy K, Viergever M, Pluim J. elastix: A toolbox for intensity-based medical image registration. IEEE Trans. On Med. Imag 2010; 29:196-205.
[8] Nakarmi U, Wang Y, Lyu J, Liang D, Ying L. A kernel-based low-rank model for low-dimensional manifold recovery in highly accelerated dynamic MRI 2017; 36:2297-2307.
Figures