0658
Measurement and correction of spatiotemporal B0 fluctuations using an FID-navigated EPI sequence1Computational Radiology Laboratory, Boston Children's Hospital, Boston, MA, United States, 2Department of Radiology, Harvard Medical School, Boston, MA, United States, 3Athinoula A. Martinos Center for Biomedical Imaging, Massachusetts General Hospital, Boston, MA, United States, 4Brigham and Women's Hospital, Boston, MA, United States, 5Advanced Clinical Imaging Technology, Siemens Healthcare, Lausanne, Switzerland, 6Radiology, Lausanne University Hospital and University of Lausanne, Lausanne, Switzerland, 7LTS5, École Polytechnique Fédérale de Lausanne (EPFL), Lausanne, Switzerland
Synopsis
Spatiotemporal B0 field fluctuations give rise to dynamic susceptibility-induced distortions in EPI time-series, which reduces signal stability, particularly at higher field strengths. In this work, we propose a novel method for rapid measurement of B0 field changes from FIDnavs embedded in an EPI sequence. We demonstrate the ability of the proposed method to accurately characterize field changes up to second order in controlled phantom and volunteer experiments. Dynamic slice-wise distortion correction using FIDnav field estimates reduced normalized root-mean-square error and improved temporal SNR in volunteers performing deliberate arm motion.
Introduction
Single-shot EPI is widely used in functional and diffusion MRI studies, but suffers from susceptibility-induced geometric distortion. Static distortions can be corrected using a B0 field map; however, this does not capture dynamic field variations that arise due to subject motion1, respiration2 and gradient heating3. Free induction decay navigators (FIDnavs) have previously been proposed to measure global frequency drifts in EPI time-series4,5, but this is insufficient to compensate for distortions induced by spatially-varying field changes. In this work, we propose a novel method for rapid characterization of spatiotemporal B0 fluctuations up to second order from FIDnavs using encoding information provided by a multi-channel reference image.Methods
Theory. FIDnavs measure the integral of the excited spin distribution, modulated by field inhomogeneities and coil sensitivities at each spatial location6. This may be approximated by discrete summation of a complex multi-channel GRE reference image with matched contrast properties, acquired with reversed gradient polarities to compensate for gradient delays.Dynamic changes in the B0 field may be expressed as a series of low-order expansions over time: $$$\mathbf{\Delta{B_0^n}}=\mathbf{\Delta{B_0^0}}+\mathbf{\beta{b_n}}$$$,where $$$\mathbf{\Delta{B_0^0}}$$$ is the static field inhomogeneity, $$$\mathbf{\beta}$$$ represents spherical harmonic (SH) basis functions and $$$\mathbf{b_n}$$$ is a vector of the weighting coefficients at each time point $$$n$$$. A forward model can be generated by simulating the effect of changes in inhomogeneity coefficients on the complex FIDnav signals ($$$y_{j,n}$$$), with spatial encoding provided by the multi-channel reference image ($$$\bf{S_{j,0}}$$$):
$$\begin{bmatrix}y_{1,n}\\y_{2,n}\\.\\.\\y_{N_c,n}\end{bmatrix}=\begin{bmatrix}\bf{S_{1,0}}\\\bf{S_{2,0}}\\.\\.\\\bf{S_{N_c,0}}\end{bmatrix}\exp(i\gamma{T_{nav}}\mathbf{\beta}\bf{b_n})$$
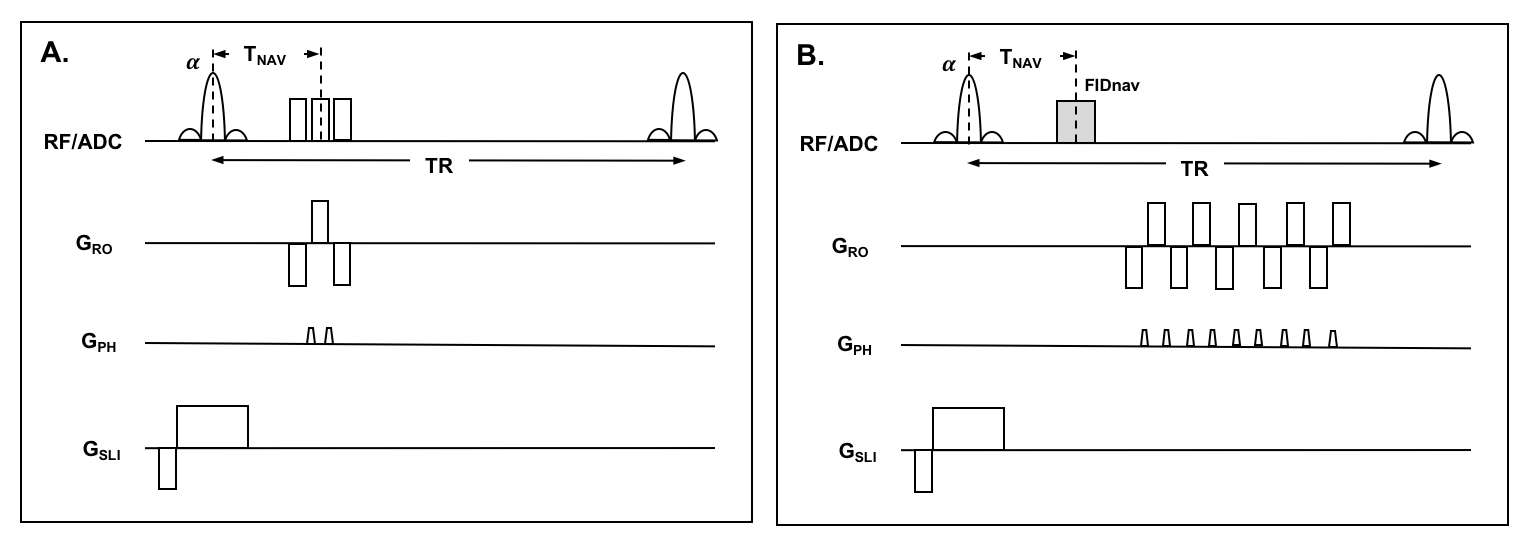
For a matrix size of 64x64 and TR of 2 s, GRE reference data for calibration would require ~4 minutes. This can be reduced to 1.2 minutes using a segmented EPI sequence with three readouts per TR and blip-up/blip-down encoding (Fig. 1A).
Phantom Validation. An FIDnav module was inserted between each slice-selective excitation and single-shot EPI readout (Fig. 1B). A water-bottle was scanned at 3T (MAGNETOM Trio; Siemens Healthcare, Erlangen, Germany) using a 32-channel head coil. First and second-order shim settings were systematically modified up to ±5 μT/m and ±50 μT/m2. FID-navigated EPI (TNAV=4 ms; TE=30 ms; TR=2 s; FA=90°; matrix=64x64; FOV=192 mm; 3-mm isotropic resolution; 10 slices; bandwidth=2232 Hz/px) and GRE field maps (TE1/TE2=4.92/7.38 ms; TR=300; FA=20°) were acquired for each shim setting. Changes in B0 inhomogeneity coefficients up to second order were measured using a non-linear iterative algorithm7 to solve the inverse problem posed by the measured FIDnavs at each excitation.
Volunteer Studies. Two subjects were scanned at 3T after providing written informed consent. Reference image data was acquired as described above. FID-navigated EPI scans (TE=30 ms; TR=2 s; FA=90°; matrix=64x64; FOV=224 mm; 3.5-mm isotropic resolution; 28 slices; bandwidth=2232 Hz/px; 10 repetitions) and ground-truth GRE field maps were acquired with changing the scanner Y-shim by 5 μT/m and while the volunteer touched their nose. FIDnav and GRE field estimates were converted into voxel-shift maps and normalized root-mean-square error (NRMSE) was calculated before and after distortion correction.
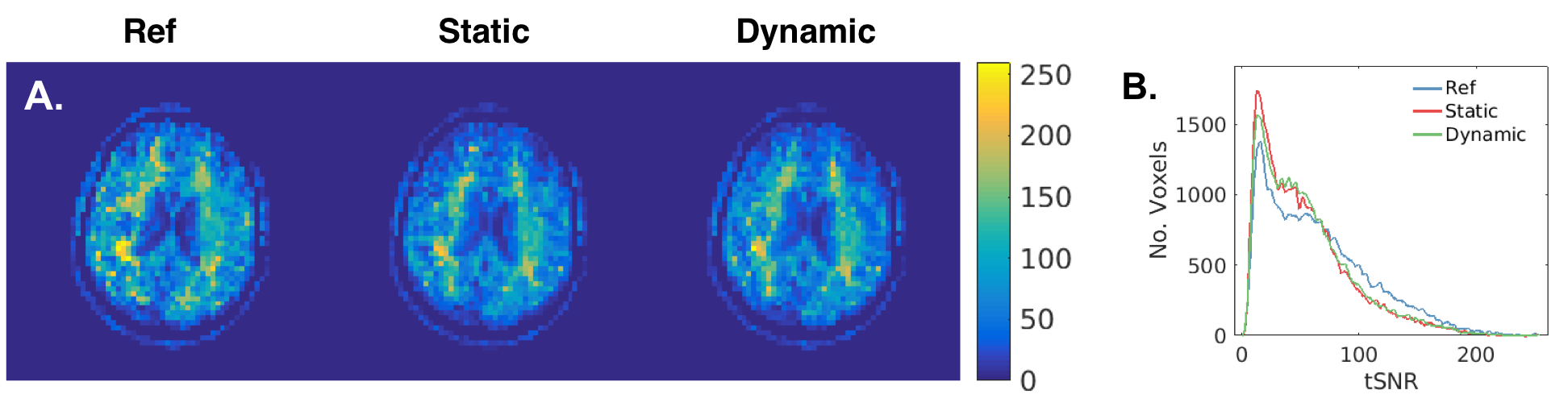
Since dynamic field changes influence the temporal stability of EPI, the efficacy of correction with our method was assessed in two volunteers imaged using an investigational whole-body 7T scanner (Siemens Healthcare). Dynamic EPI series (75 repetitions in 2.5 min) were acquired with no motion and with field changes induced by continuous hand-to-chin motion. Static and FIDnav-based dynamic distortion correction was applied to each EPI volume and temporal signal-to-noise ratio (tSNR) was computed following rigid-body registration to the reference volume.
Results
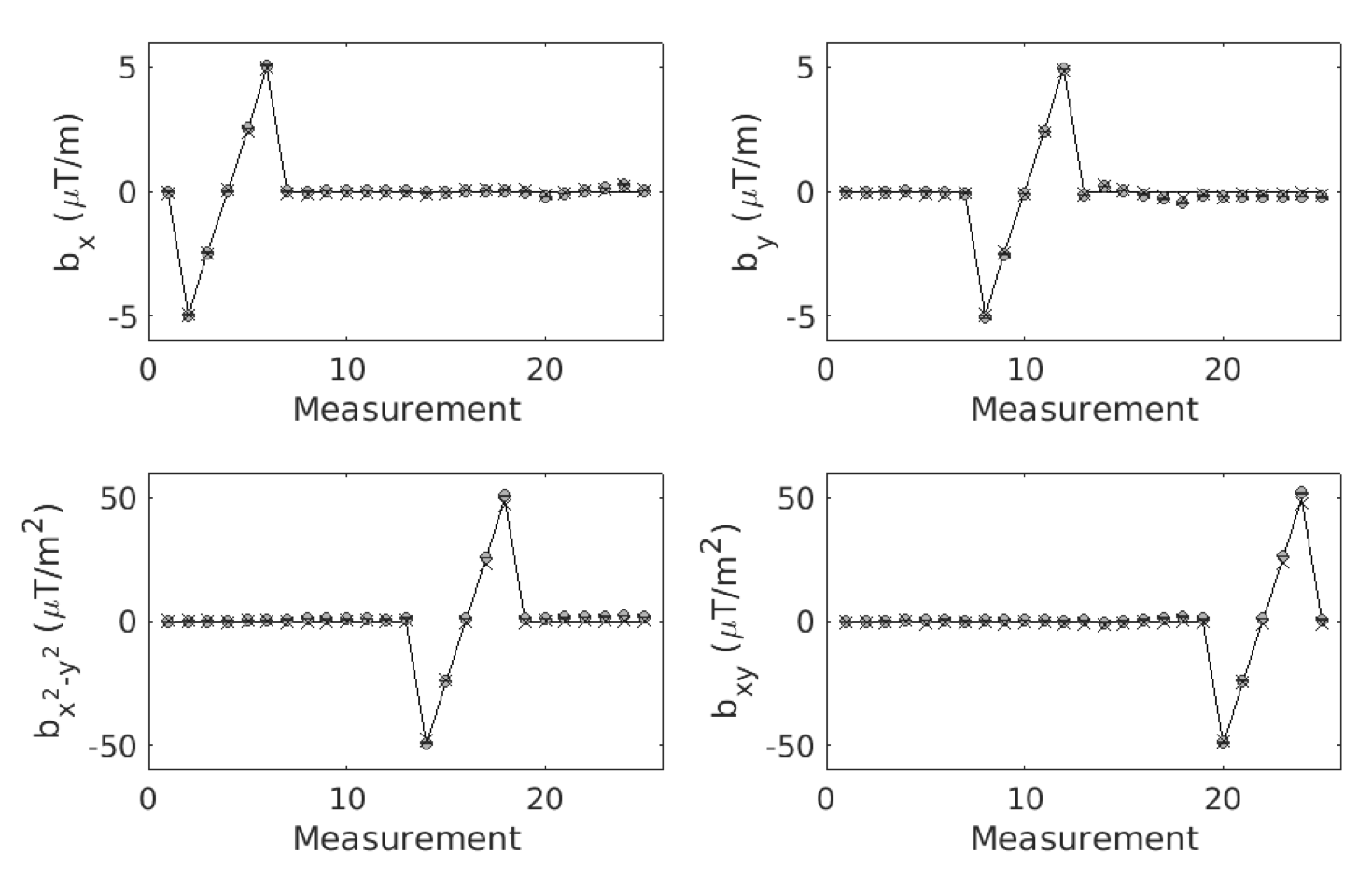
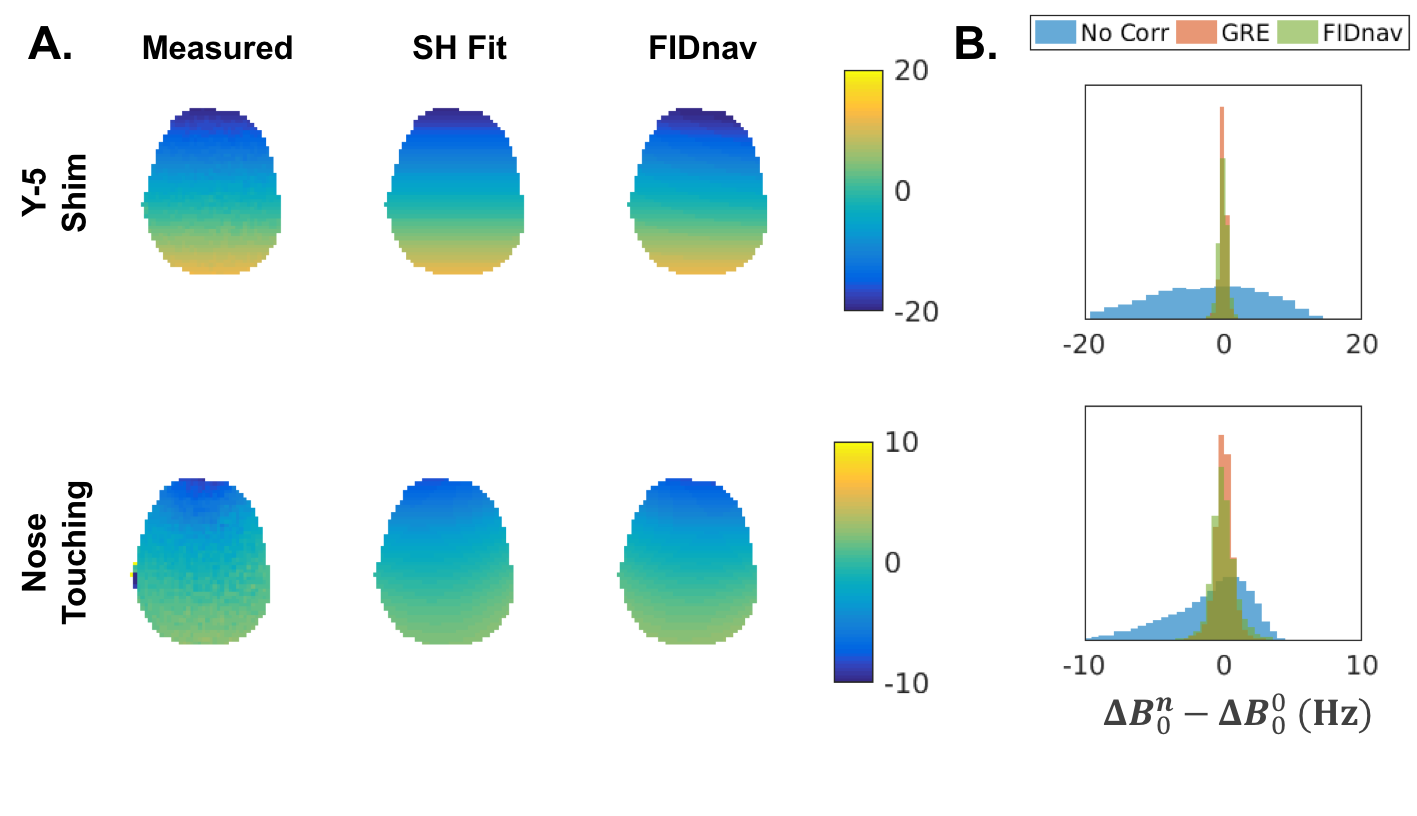
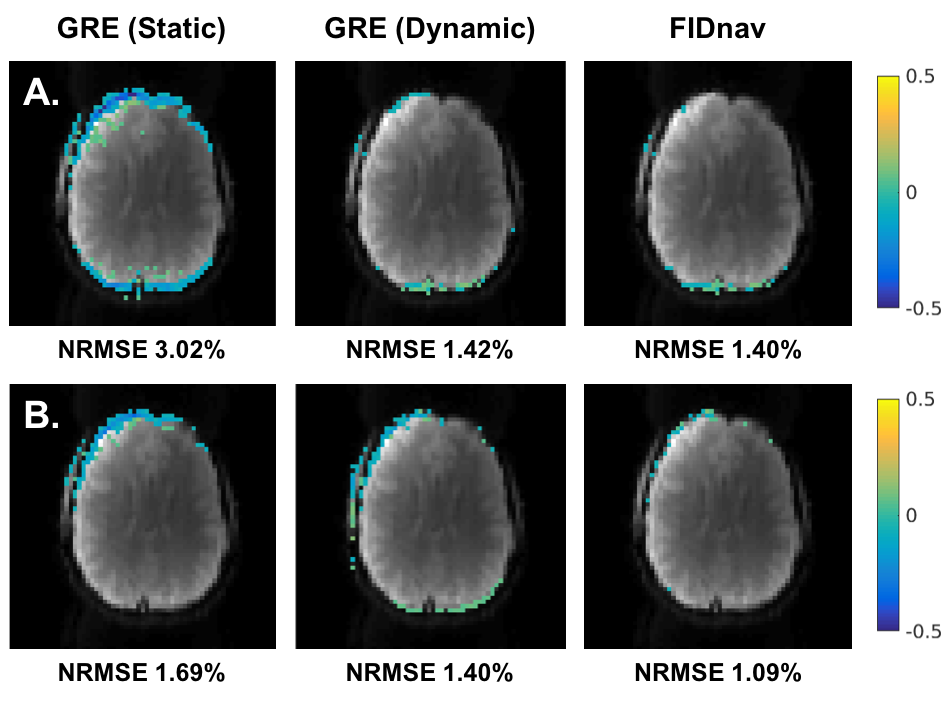
FIDnavs accurately characterized shim changes up to second order in the phantom (Fig. 2) with mean absolute errors of 0.053 ± 0.067 μT/m and 0.935 ± 0.984 μT/m2.Figure 3A shows a comparison of field changes ($$$\mathbf{\Delta{B_0^n}-\Delta{B_0^0}}$$$) measured using FIDnavs and dual-echo GRE in a volunteer. FIDnavs accounted for a substantial proportion of the variance induced by both manual shim changes and nose touching (Fig. 3B). FIDnav field measurements effectively corrected residual distortions (Fig. 4), with mean reductions in NRMSE of 56% ± 3% for changing Y-shim and 40% ± 7% for nose touching.
Figure 5 shows tSNR maps from a volunteer scanned at 7T. Across both volunteers performing the hand-to-chin motion, tSNR improved from 52.7 ± 1.4 to 54.8 ± 0.7 with FIDnav correction, compared to 60.6 ± 6.5 with no motion.
Discussion
Spatiotemporal B0 fluctuations give rise to dynamic susceptibility-induced distortions in EPI time-series, which become particularly apparent with increasing field strengths. In this work, we demonstrate that FIDnavs can accurately characterize B0 changes up to second order using the proposed method. Current state-of-the-art methods for dynamic distortion correction involve acquiring a dual-echo navigator image;8 however this requires ~1 second to acquire and process each volume. Our results show that FIDnav field estimates are in excellent agreement with measured dual-echo field maps in both phantom and volunteer experiments but take a fraction of the time to acquire. As FIDnavs can be inserted in each slice of the acquisition without disturbing the sequence, this facilitates continuous correction for spatiotemporal B0 fluctuations, with potential for real-time dynamic shimming.9Conclusion
Spatiotemporal B0 variations up to second order can be rapidly and accurately characterized from FIDnavs embedded in an EPI sequence. The proposed approach facilitates slice-level dynamic distortion correction, which can be leveraged to improve the sensitivity of fMRI.Acknowledgements
This research was supported in part by NIH grants R01 EB019483, R01 NS079788, R01 DK100404, R44 MH086984, IDDRC U54 HD090255 and P41 EB015896.References
1. Liu, J., de Zwart, J. A., van Gelderen, P., Murphy-Boesch, J. & Duyn, J. H. Effect of head motion on MRI B0 field distribution. Magn. Reson. Med. 80, 2538–2548 (2018).
2. Van Gelderen, P., De Zwart, J. A., Starewicz, P., Hinks, R. S. & Duyn, J. H. Real-time shimming to compensate for respiration-induced B0 fluctuations. Magn. Reson. Med. 57, 362–368 (2007).
3. Foerster, B. U., Tomasi, D. & Caparelli, E. C. Magnetic field shift due to mechanical vibration in functional magnetic resonance imaging. Magn. Reson. Med. 54, 1261–1267 (2005).
4. Hu, X. & Kim, S.-G. Reduction of signal fluctuation in functional MRI using navigator echoes. Magn. Reson. Med. 31, 495–503 (1994).
5. Pfeuffer, J., Van de Moortele, P. F. De, Ugurbil, K., Hu, X. & Glover, G. H. Correction of physiologically induced global off-resonance effects in dynamic echo-planar and spiral functional imaging. Magn. Reson. Med. 47, 344–353 (2002).
6. Wallace, T. E., Afacan, O., Waszak, M., Kober, T. & Warfield, S. K. Head motion measurement and correction using FID navigators. Magn. Reson. Med. 81, 258–274 (2019).
7. Powell, M. J. D. The BOBYQA algorithm for bound constrained optimization without derivatives. (2009).
8. Alhamud, A., Taylor, P. A., van der Kouwe, A. J. W. & Meintjes, E. M. Real-time measurement and correction of both B0 changes and subject motion in diffusion tensor imaging using a double volumetric navigated (DvNav) sequence. Neuroimage 126, 60–71 (2016).
9. Stockmann, J. P. & Wald, L. L. In vivo B0 field shimming methods for MRI at 7 T. Neuroimage 168, 71–87 (2018).
Figures