0308
Simultaneous stiffness measurement of the upper abdomen with multiple acoustic actuators MRE: feasibility and repeatability1Mayo Clinic, Rochester, MN, United States, 2West China Hospital, Sichuan University, Chengdu, China
Synopsis
Simultaneous stiffness assessment of multiple organs in patients with systemic diseases may be beneficial. Here we used four passive MRE drivers to assess the feasibility and repeatability of simultaneous stiffness measurements of the liver, spleen and kidneys using 60-Hz vibrations. No significant bias was observed in the stiffness measurements of the liver and kidneys with 1 versus multiple drivers. Splenic stiffness was lower with four drivers. With four drivers, it is possible to obtain simultaneous stiffness measurements of the liver, spleen and kidneys with repeatability coefficients similar to those using a single driver while also overcoming attenuation in the liver.
Introduction
Magnetic resonance elastography (MRE) is a phase-contrast-based MRI technique used to visualize shear wave motion in biological tissues to provide quantitative measurements of the mechanical properties of the tissue in vivo. To date, MRE has primarily been used clinically as a quantitative tool for diagnosing and staging liver fibrosis. Other applications in the upper abdomen include the spleen, pancreas, and kidneys.1 Typically MRE is performed using a single passive driver secured to the body (the source of the motion introduced into the body) targeting a single organ. However, there are emerging interests in the simultaneous stiffness evaluation of multiple organs to assess systemic changes, such as simultaneous hepatic and splenic stiffness measurements to evaluate portal pressure and the hepatic venous pressure gradient (HVPG).2 Using a single driver may not produce the necessary amount of motion in all of the organs of interest in a single acquisition, so using multiple drivers simultaneously may be required for these applications. Another potential benefit of using multiple drivers is for liver MRE. Wave attenuation,3,4 especially in patients with soft livers with little or no fibrosis, can make it difficult to measure the stiffness of deep liver tissue and tumors far away from the driver. Using multiple drivers around the abdomen may produce more motion deeper in the liver to improve these measurements. The purpose of this study was to explore the feasibility of simultaneous stiffness evaluation of the liver, spleen and kidneys in healthy volunteers using multiple acoustic drivers, and to compare the stiffness measurement of each organ using multiple drivers to that from a single driver.Methods
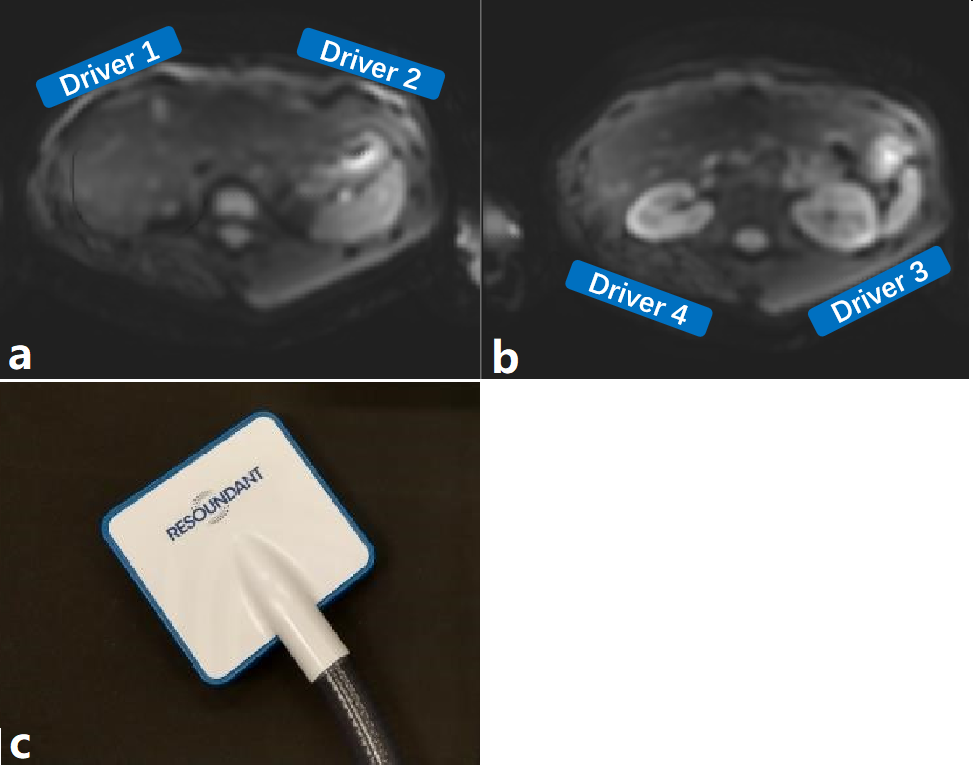
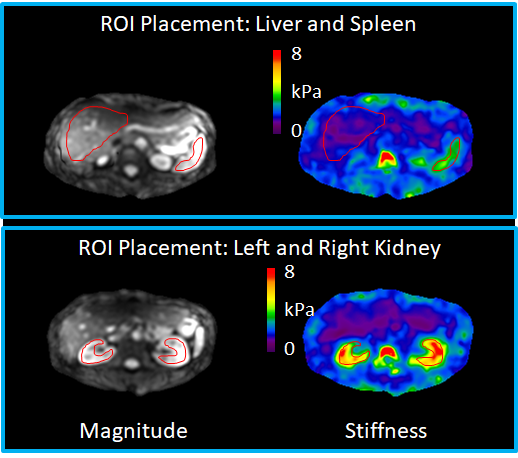
Between July 2019 and October 2019, this IRB-approved study was performed in 10 volunteers with no known significant liver diseases, as indicated by their medical records. All volunteers provided written informed consent and fasted at least four hours before the MRE scan. All examinations were performed on a 3T scanner (GE, Signa HDxt, HD16.0_V03) at the end of expiration. Four soft, flexible, acoustic passive drivers which was connected to independent active driver (Resoundant, Inc., Rochester, MN) were used and were placed as shown in Figure 1. The drivers were activated individually and simultaneously in different combinations. A single-shot, flow-compensated, spin-echo, EPI MRE sequence was used with the following imaging parameters: 60-Hz vibrations, 32 slices, TR/TE = 1300/46.8 ms, slice thickness = 3.5 mm, ASSET factor = 2, 3 MRE time points, and 6 motion-encoding directions (+- X, Y, Z). The examination was repeated three times: twice on the same day, and the third time was conducted on a different day. Stiffness images (elastograms) were calculated offline using a customized 3D MRE algorithm. After visual evaluation of sufficient waves in each organ for driver selection, stiffness measurement was conducted by the same person for the liver, spleen, left and right kidney. For each driver combination, the mean tissue stiffness was compared to that from using a single driver using the Wilcoxon signed-rank test. The same-day, between-days and overall repeatability of the stiffness measurement for the liver, spleen, left and right kidney using 1 and multiple drivers were also calculated. A p-value of 0.05 was considered statistically significant for all analyses.Results
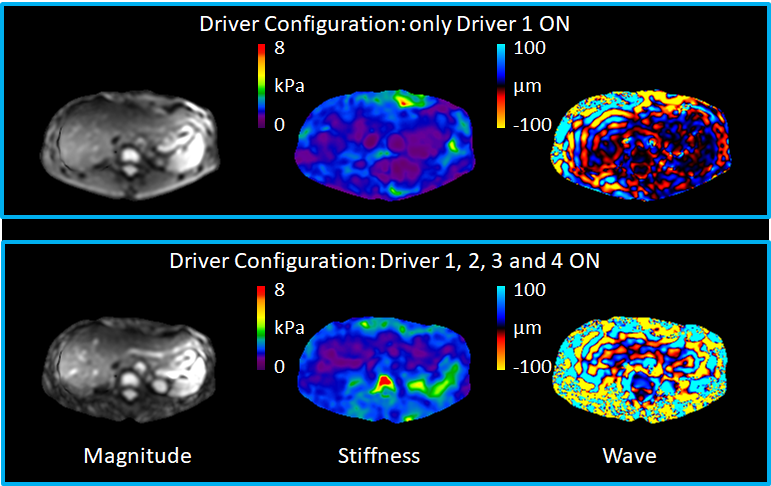
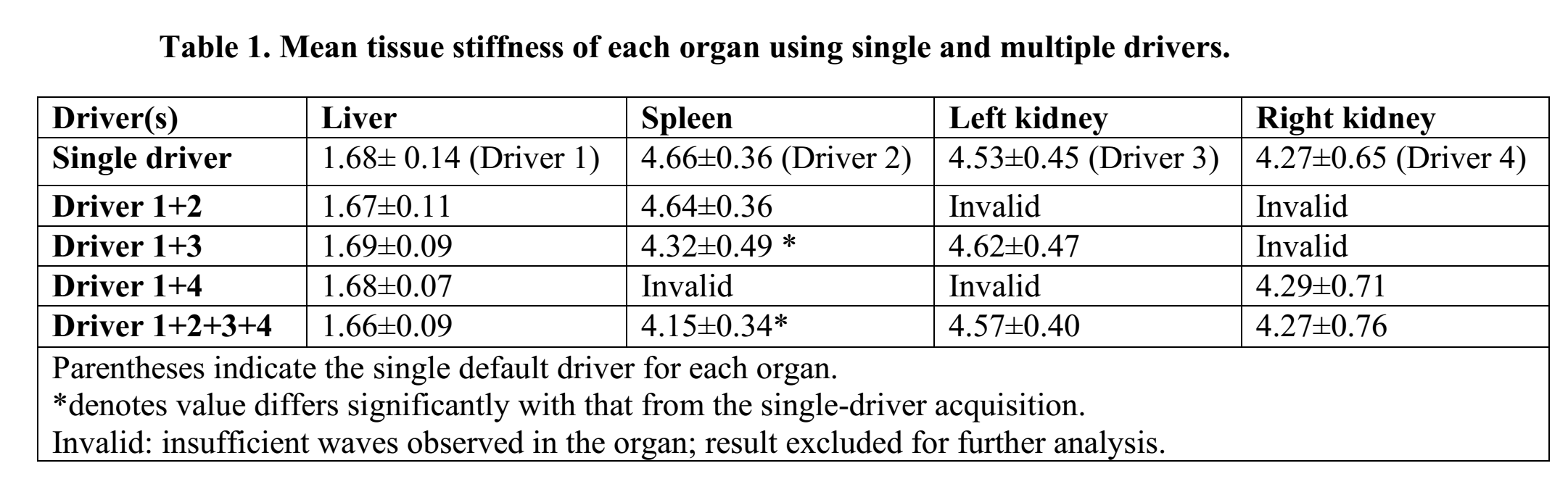
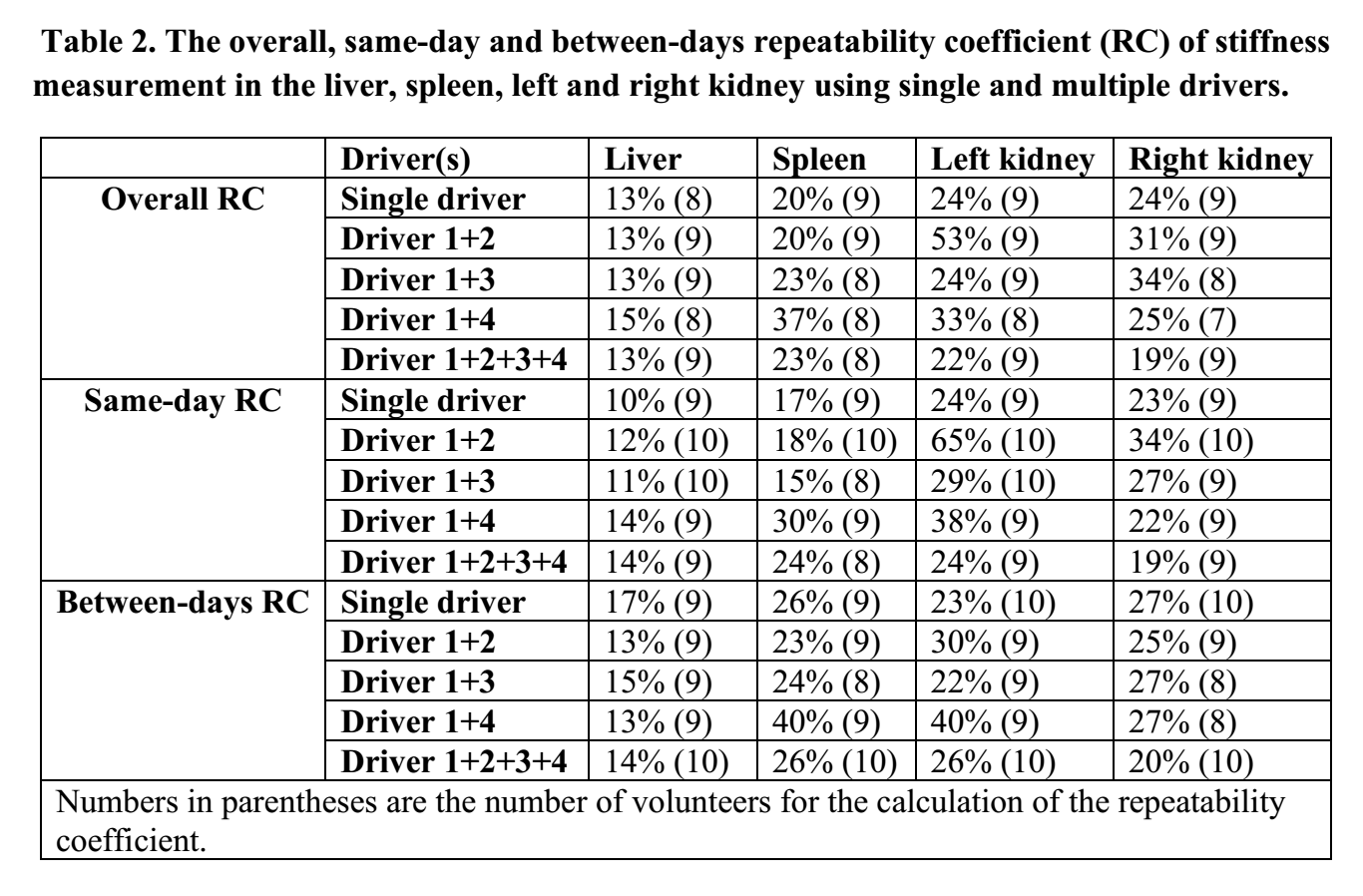
All volunteers (male/female: 7/3; age: 26-43 years) had no significant liver diseases. The liver fat fraction, as calculated by 2-point Dixon imaging performed in the same exams, ranged from 5.9% to 27.4%. The body mass index (BMI) ranged from 19.81 kg/m2 to 29.98 kg/m2. The mean time interval between the first and second visit was 5.6 days (1-19 days). Assessed by visual evaluation, when all four drivers were activated, the amplitude of the shear waves was higher deeper in the liver than when only a single driver was used (Figure 2). The mean stiffness of each organ using 1 and multiple drivers is listed in Table 1. There was no significant difference in liver or kidney stiffness using 1 or multiple drivers. Compared with a single driver, the splenic stiffness was significantly lower when drivers 1+3 or all four drivers were activated together. The overall, same-day and between-days repeatability coefficient of the stiffness measurements using 1 and multiple drivers are shown in Table 2.Discussion
As demonstrated in Figure 2, the deeper portions of soft livers, which have high attenuation, can be better illuminated with waves from different directions when all four drivers are activated and the measurements can be reported with higher confidence. This could be beneficial for characterizing deep focal liver lesions by using multiple-driver MRE to provide a more uniform wave illumination of the lesion to address the shadowing effect.4 The calculated repeatability coefficient in the liver in this study group agrees with our previous assessments of 3D MRE. The difference in spleen stiffness using 1 and multiple drivers was speculated to be caused by the stronger vibrations when the left posterior driver (driver 3) was activated, which was placed right against the spleen. In conclusion, using 4 drivers allows simultaneous stiffness evaluation of the liver, spleen and kidneys with repeatability coefficients similar to those when using a single driver, and provides a more complete assessment of the liver as well.Acknowledgements
No acknowledgement found.References
1. Wang, J., et al., New and Emerging Applications of Magnetic Resonance Elastography of Other Abdominal Organs. Top Magn Reson Imaging, 2018. 27(5): p. 335-352.
2. Dyvorne, H.A., et al., Simultaneous measurement of hepatic and splenic stiffness using MR elastography: preliminary experience. Abdom Imaging, 2015. 40(4): p. 803-9.
3. Zheng, Y., et al., Magnetic resonance elastography with twin pneumatic drivers for wave compensation. Conf Proc IEEE Eng Med Biol Soc, 2007. 2007: p. 2611-3.
4. Mariappan, Y.K., et al., Magnetic resonance elastography with a phased-array acoustic driver system. Magn Reson Med, 2009. 61(3): p. 678-85.
Figures