Robotic Field Scanner
1Physikalisch Technische Bundesanstalt (PTB), Berlin, Germany
Synopsis
In our efforts to strengthen open source science, open source medical technology and collaboratively building an affordable open source MRI scanner, we have realized the necessity to also construct affordable and customizable open source scientific measurement equipment. Here the developments and applications of COSI Measure, a robotic field scanner with submillimeter fidelity are presented. The documentation and design files of COSI Measure are freely available and licensed under the open source hardware license CERN OHL v1.2 (www.opensourceimaging.org/cosi-measure).
Introduction
Precise positioning systems
are a useful tool in many research applications such as the
developments of magnets, gradient coils, RF coils, MR safety based
investigations and validation measurements of MR techniques.
Commercially available systems are not only costly (purchasing
and maintenance), but
also proprietary. This limits the flexibility of such devices being
used for dedicated research applications and motivated already
numerous researchers to build their own measurement equipment. Even
though these systems might find their way into a scientific
publication, they are typically not documented very well making it
difficult for others to rebuild and reuse such technology. The
consequence is that the wheel is reinvented over and over again,
which is not very resource efficient for scientific progress. In
our efforts to strengthen
open source science, open source medical technology and
collaboratively
building
an affordable open source MRI scanner (Figure
1), we have realized the
necessity to also construct affordable and customizable open
source scientific
measurement equipment [1-3].
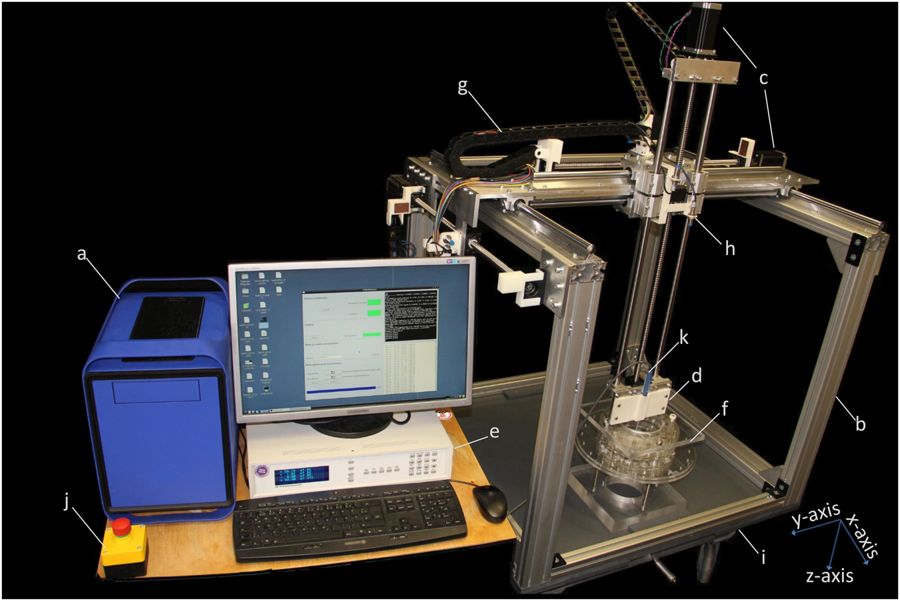
Here the developments of COSI Measure, a robotic field scanner with
submillimetre fidelity are
presented (Figure 2) [4].
The documentation and design files of COSI Measure are freely
available and licensed under the open source hardware license CERN
OHL v1.2 (www.opensourceimaging.org/cosi-measure).Methods and Results
The positioning system can be divided into a mechanical subsystem, an electronic subsystem and software. All necessary mechanical and electrical components are available in a bill of material (BoM) file and the total material cost of the system is ~2000€.
Mechanical subsystem
The mechanical subsystem is designed as a three axis linear stage consisting of ball screws with a robust aluminium frame. The overall dimensions have been limited for the system to pass through a door of standard width = 940mm. This allows an effective measuring volume of around (550 x 550 x 650) mm³ inside the aluminium frame. It is open towards all directions allowing a flexible measurement setup also outside this effective measuring volume. All necessary parts are available as 3D CAD files in the open source software FreeCAD (www.freecadweb.org) and as technical drawings.
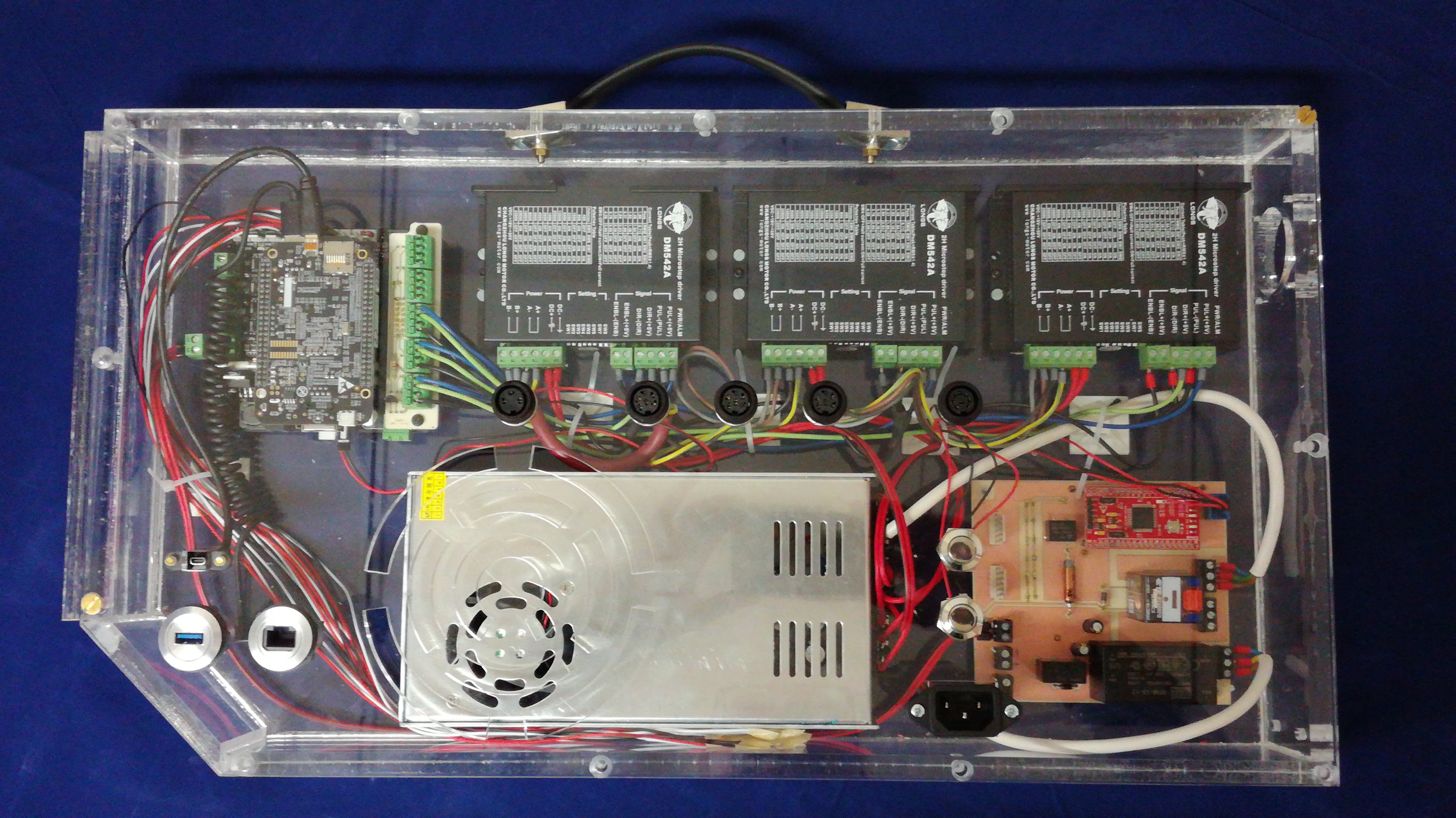
Electronic subsystem
The electronic subsystem is based on the open source embedded computer Beagle Bone Black (BBB), a cape board BeBoPr++, a power management board, a power supply unit, NEMA23 stepper motors, DM542A motor drivers and inductive proximity sensors. The current system allows to connect up to 5 motor drivers, 6 limit switches, temperature sensors and pulse-width modulation (PWM) outputs, while the BBB has more GPIO pins (65 in total) allowing a flexible application. The BBB furthermore has a USB, HDMI and RJ45 port for external communication and connection of a mouse, keyboard and monitor. An emergency stop button was included for hardware protection and safety reasons. The power management board schematics and PCB files have been created using the open source software KiCAD (http://kicad-pcb.org). The casing is available as 3D CAD files and has been designed using the open source software FreeCAD (Figure 3). It includes all necessary connectors/buttons (USB, RJ45, microHDMI, power, stepper motors, limit switches, emergency button, on/off switches) so that the electronics can be moved and reused in different measurement setups e.g. to drive different stepper motors or using an extension cable to position the electronics outside the magnetic stray field of an MR scanner.
Software
We are running Debian Linux from an SD-card slot on the BBB. The motor controller program contains PRU code and ARM code. The PRU code runs on the co-processors and controls the timing and acceleration for the stepper motors. The ARM code is open source and allows for e.g. command line inputs of G-code commands. A graphical user interface was developed in PyQt to integrate all functions (e.g. system initialization, homing, single coordinate measurement, 2D/3D path measurements).
Quality, reliability and safety (QRS)
It is important to assure quality and safety of the device using standardized methods, to guarantee a safe operation, rebuild and further development by other groups. For this purpose we performed the Failure Mode and Effect Analysis (FMEA). The FMEA is a structured, team-based approach that is legally required and standard practice in the manufacturing industry internationally.
Applications
COSI measure has been successfully used for a variety of applications such as:
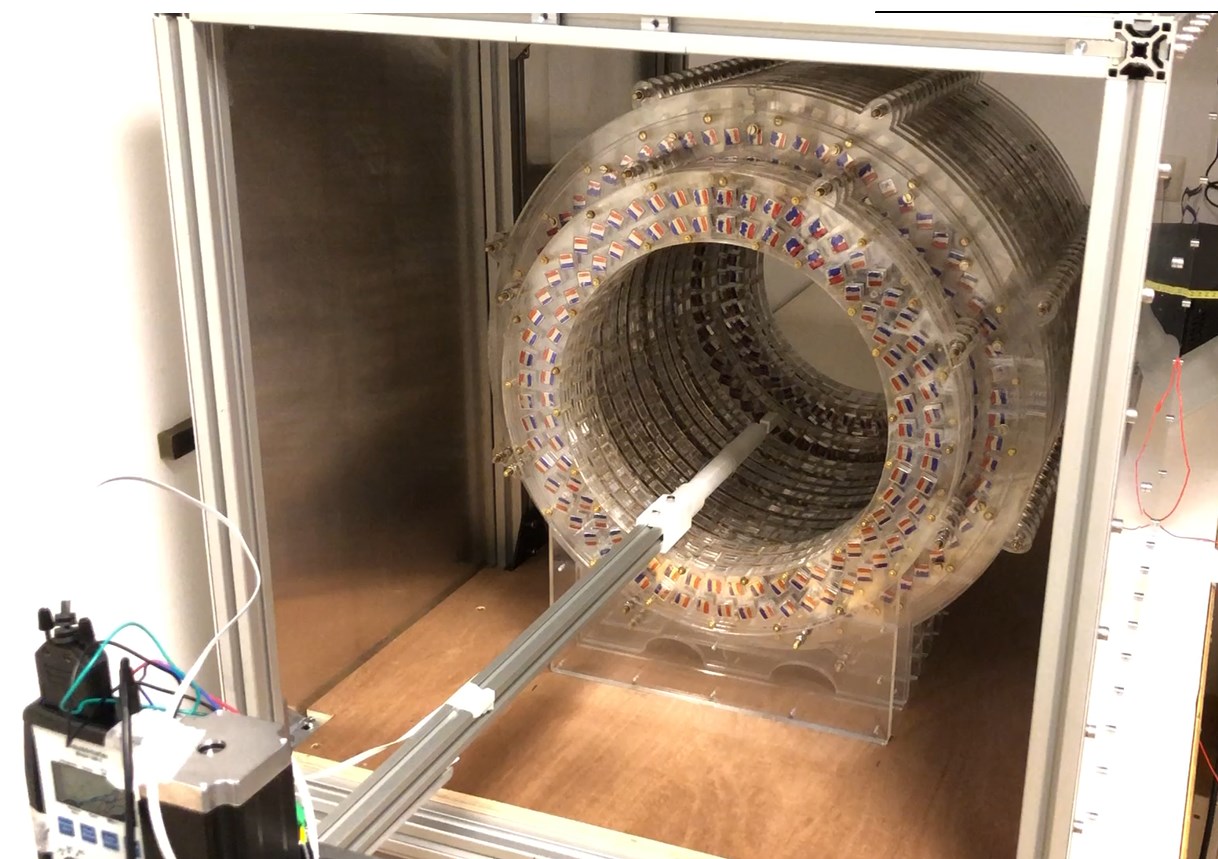
- magnetic field mapping of Halbach based permanent magnets (Figure 4) [5]
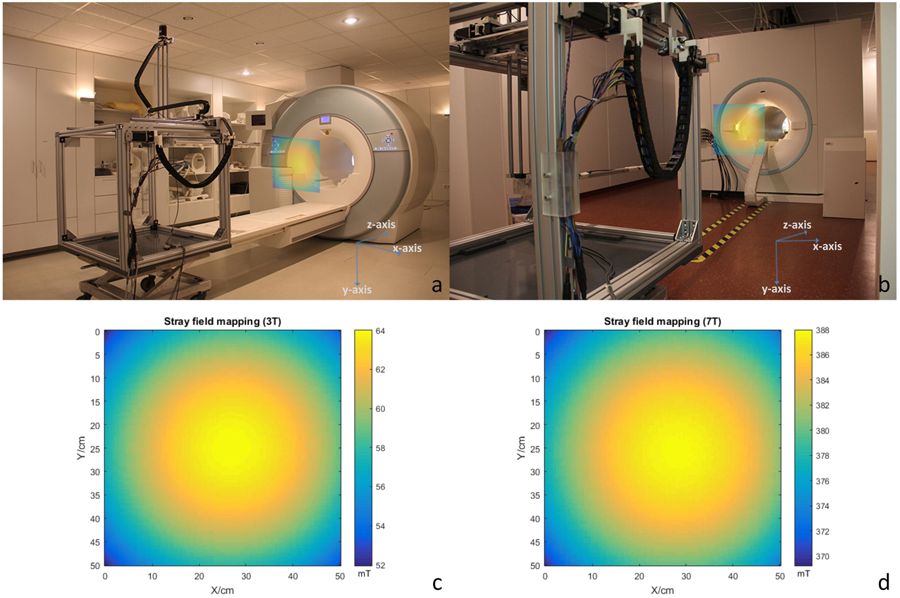
- stray field static magnetic field mapping of 3.0T and 7.0T MR systems (Figure 5) [4]
- 2D fiber optic temperature measurements [4]
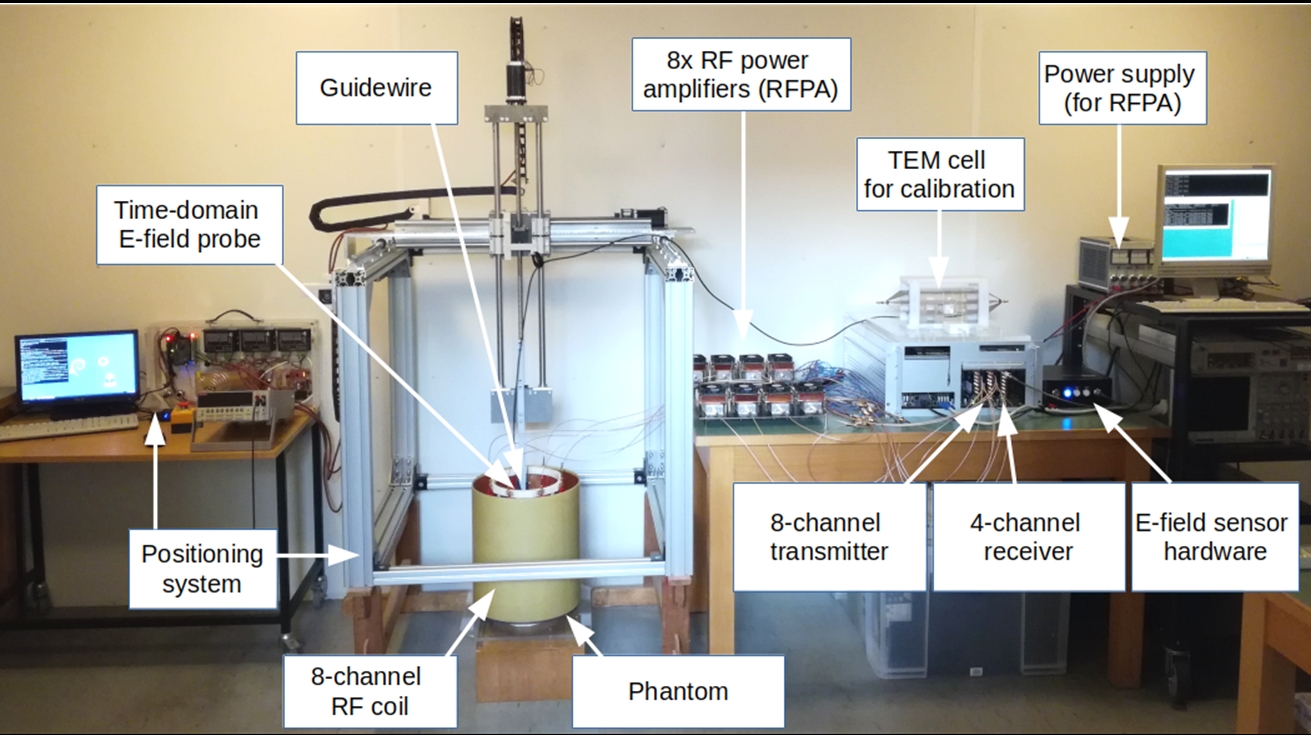
- RF coil field mapping MR safety investigations of implants in parallel transmission (Figure 6) [6]
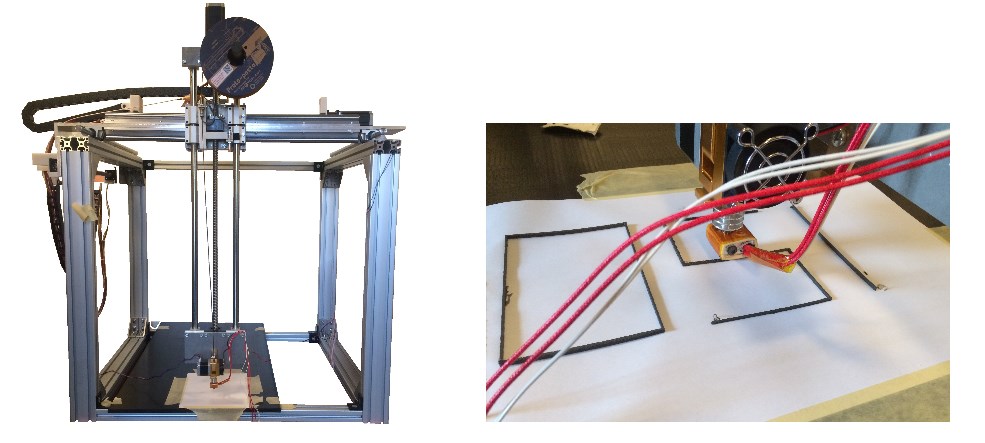
- 3D printing (0.4mm extruder, 0.2mm layer thickness) (Figure 7)
Summary
In an interconnected global society with an ever growing technical complexity and healthcare costs, collaborations are able to solve the pending problems from today and arising challenges of tomorrow. To fully exploit this potential we need transparent, black box free systems and infrastructure. In this respect open source is the key to affordable, accessible, appropriate and available medical technology and research infrastructure.Acknowledgements
This work was partly funded by the EMPIR grant 17IND01 MIMAS. The EMPIR initiative is co-funded by the European Union’s Horizon 2020 research and innovation programme and the EMPIR Participating States.References
[1] Winter, L., et al. “Open Source Imaging Initiative”, Proc. ISMRM, 2016, #3638.
[2] Arndt, F., et al., “The Open Source Imaging Initiative (OSI²) - Update and Roadmap”, Proc. ISMRM, 2017, #4463
[3] Winter, Lukas, et al. "Open Source Medical Devices for Innovation, Education and Global Health: Case Study of Open Source Magnetic Resonance Imaging." Co-Creation. Springer, Cham, 2019. 147-163.
[4] Han, H., et al. "Open source 3D multipurpose measurement system with submillimetre fidelity and first application in magnetic resonance." Scientific reports 7.1 (2017): 13452.
[5] O`Reilly, TPA, et al. “The design of a homogeneous large-bore Halbach array for low field MRI”, Proc. ISMRM, 2019
[6] Winter, L., et al. “Parallel transmission medical implant safety testbed: First application using time-domain E-field probes to measure and mitigate RF induced currents” Proc. ISMRM, 2019
Figures