5338
A POCS-Enhanced k-Space Reconstruction for 3D Multi-Slab Diffusion Imaging1Center for Biomedical Imaging Research, Department of Biomedical Engineering, School of Medicine, Tsinghua University, Beijing, China, 2Tiantan Image Research Center, China National Clinical Research Center for Neurological Diseases, Beijing, China, 3Wellcome Centre for Integrative Neuroimaging, FMRIB, Nuffield Department of Clinical Neurosciences, University of Oxford, Oxford, United Kingdom, 4Vascular Imaging Laboratory, Department of Radiology, University of Washington, Seattle, WA, United States
Synopsis
3D multi-slab acquisition is a new technique for high-resolution isotropic diffusion imaging with sufficient SNR maintained. To fill the whole 3D k-space, multi-shot acquisitions are usually needed. However, this can cause the inter-shot phase variations. In this study, we propose a new k-space-based phase correction method for multi-slab diffusion imaging. This proposed method is based on a previous method termed GRAPPA with compact kernel (GRAPPA-CK). Furthermore, POCSMUSE algorithm is subsequently used to enhance the reconstruction of GRAPPA-CK. Finally, the newly proposed method is demonstrated to be compatible with in-plane acceleration in 3D multi-slab imaging.
Purpose
Recently, 3D multi-slab acquisition has emerged as a new technique for high-resolution isotropic diffusion imaging with SNR well maintained (1-4). To fill the whole 3D k-space, multi-shot acquisitions are usually needed. However, under diffusion gradients, physiological motion can cause phase variations among different shots (5,6) and such phase variations must be corrected before shot combination. Previously, a k-space-based phase correction method, GRAPPA with compact kernel (GRAPPA-CK), has been developed for 2D multi-shot diffusion imaging. GRAPPA-CK is shown to be relatively insensitive to the distortion mismatch between image-echo and navigator (7). In this study, GRAPPA-CK is extended to 3D multi-slab diffusion imaging. Additionally, the POCSMUSE (8) algorithm is subsequently used to enhance the performance of GRAPPA-CK. Finally, the newly proposed methods is demonstrated to be compatible with in-plane acceleration in 3D multi-slab imaging.Methods
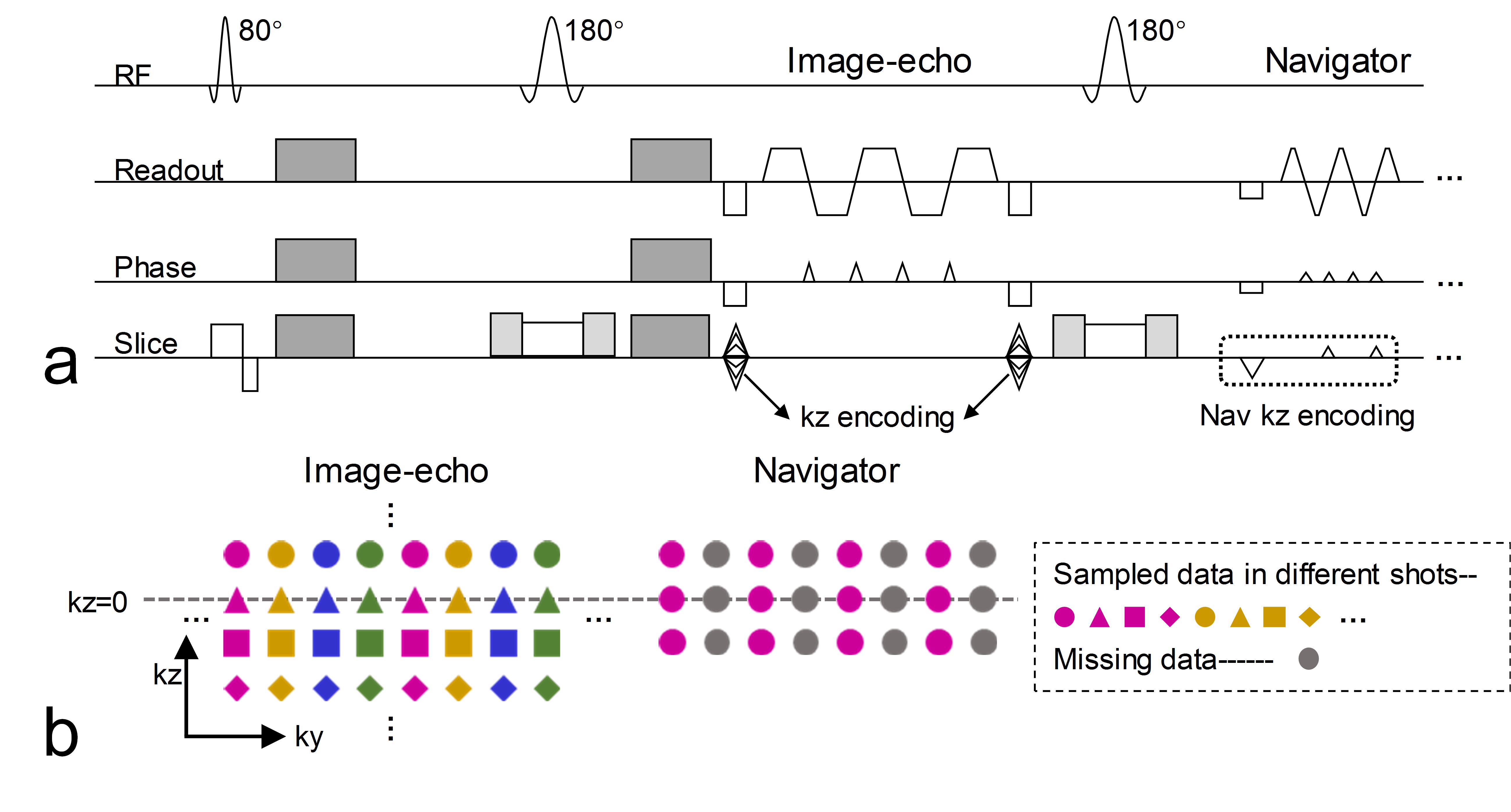
Data acquisition In vivo brain data were acquired on a Philips 3.0T Achieva TX MRI scanner (Philips Healthcare, Best, The Netherlands) using a 32-channel head coil. A 2D navigated interleaved EPI (iEPI) sequence was modified for 3D multi-slab diffusion acquisition (Fig. 1a). 4-shot iEPI was used to acquire each kz plane and a 3D navigator was subsequently acquired after each image-echo. To reduce potential distortion mismatch between the image-echo and navigator, the navigator was acquired by reducing its echo spacing (RRO-fold) in the readout direction and under-sampling (RPE-fold) in the phase encoding direction (9). The sampling trajectories were shown in Fig. 1b. 10 slabs with 12 slices per slab (20% oversampling in the kz direction) were acquired, and adjacent slabs were overlapped by 3 slices. Other main imaging parameters were: FOVxy=213×213 mm2, resolution=1.3 mm3, partial Fourier factor=0.7 (ky direction) for image-echo, TE1/TE2/TR=74 ms / 129 ms / 2 s. The navigator was acquired with RRO=2 and RPE=2. Diffusion encoding was applied along 3 orthogonal directions with b=1000 s/mm2. The total acquisition time is 6min24s. An extra b=0 calibration data was acquired, which was oversampled by a factor of 2 along the kz direction for the initial slab profile estimation (3min12s). Meanwhile, a 2D 4-shot iEPI scan was conducted to estimate the coil sensitivity map (35s).
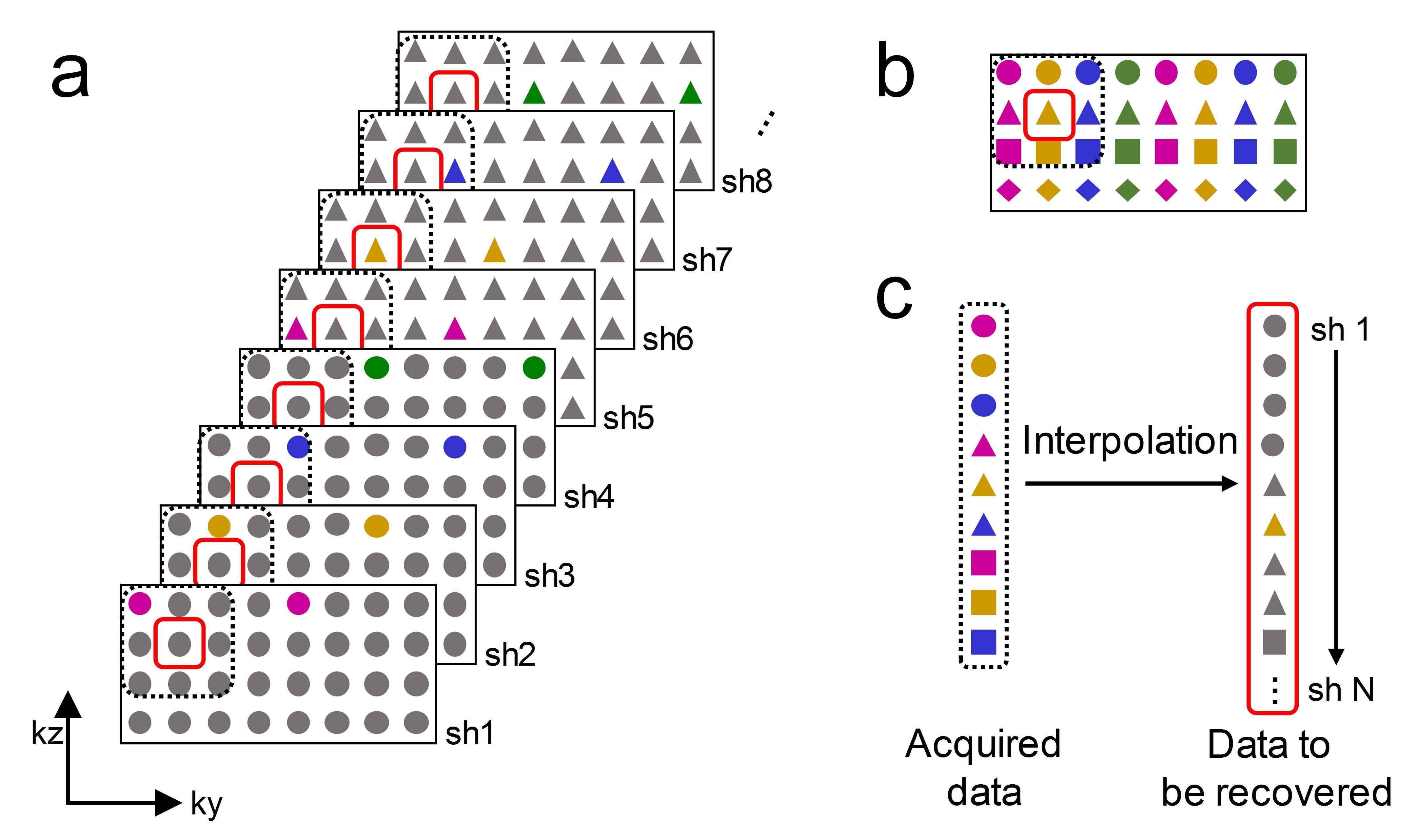
Reconstruction The under-sampled navigator was first recovered using GRAPPA (10). Then GRAPPA-CK was conducted, with the weighting matrix estimated from the recovered navigator (Fig. 2). The acquired data from different shots (represented by different colors and shapes in Fig. 2b) were first sorted into different k-spaces (Fig. 2a). The missing data in a specified (kx, ky, kz) location (red solid box in Fig. 2b) was recovered in a pre-defined kernel (dark dashed box in Fig. 2b). The interpolation process was described by Fig. 2c. It should be noted that the “distance” concept only exists in kx, ky and kz dimension, but not in the shot dimension. Thus for a specified (kx, ky, kz) location, the missing data of all shots can be recovered using the same kernel (but with different weighting coefficients), as shown in Fig. 2c.
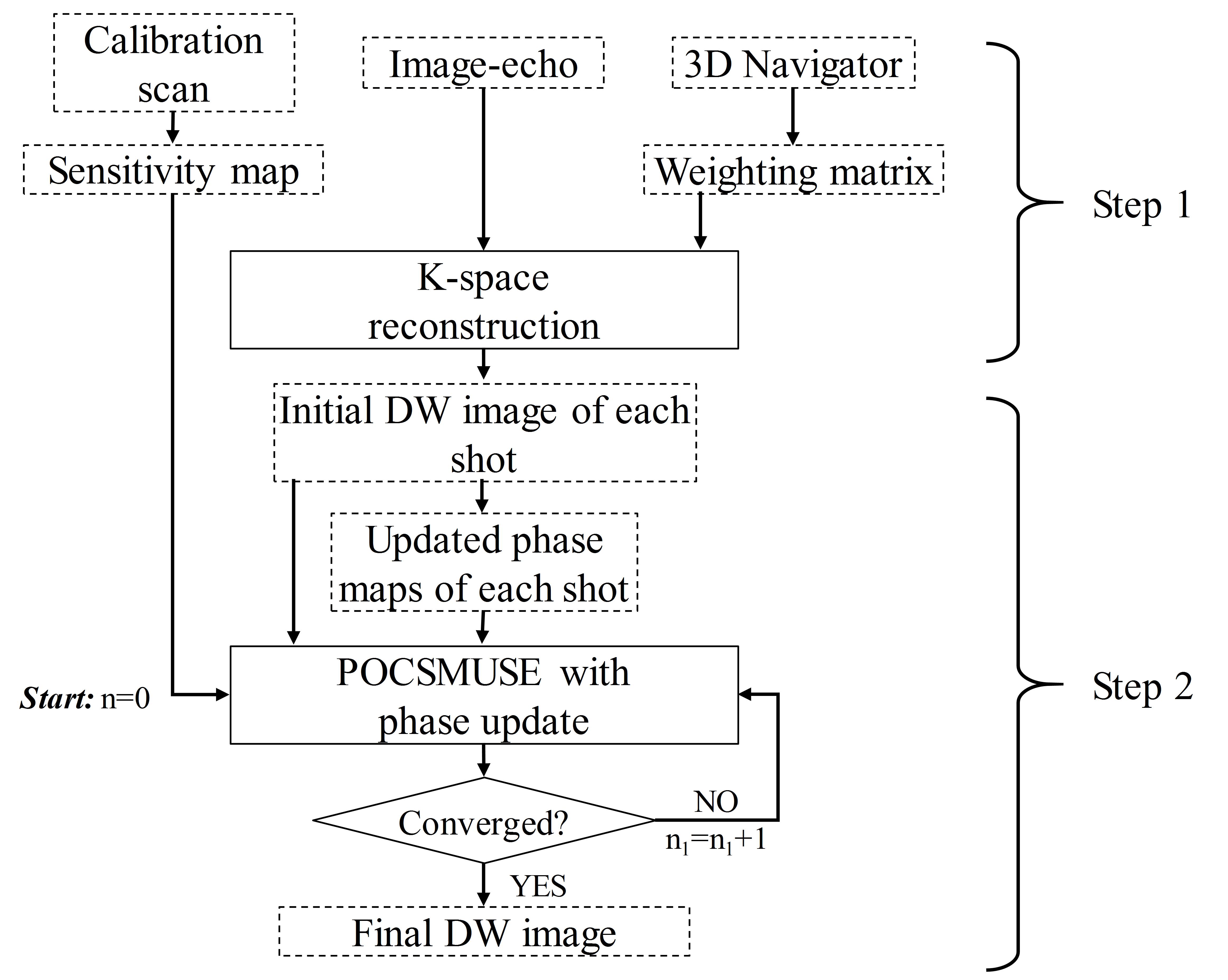
After GRAPPA-CK, the DW images of each shot were initially recovered. However, as different kz planes of the 3D navigator have different echo time, phase errors along the kz dimension may occur due to field inhomogeneity (4). To further remove possible residual artifacts and noise, coil sensitivity and phase smoothness constraints were added, by using the POCSMUSE (8) algorithm (Fig. 3). The initial phase maps can be calculated from the recovered DW images of each shot and then the phase maps were updated in each iteration. The stop criterion of POCSMUSE iteration is that the absolute variation of an iteration falls below a predefined tolerance (0.001), or the iteration number equals to a predefined value (10 in this study). Finally, NPEN (3) was used to correct the slab boundary artifacts.
To demonstrate the compatibility of the proposed method with further in-place acceleration, data were manually 2-fold under-sampled in the ky direction, namely 2 out of 4 shots were used for each kz plane. Then the same reconstruction procedure was conducted.
Results and Discussion
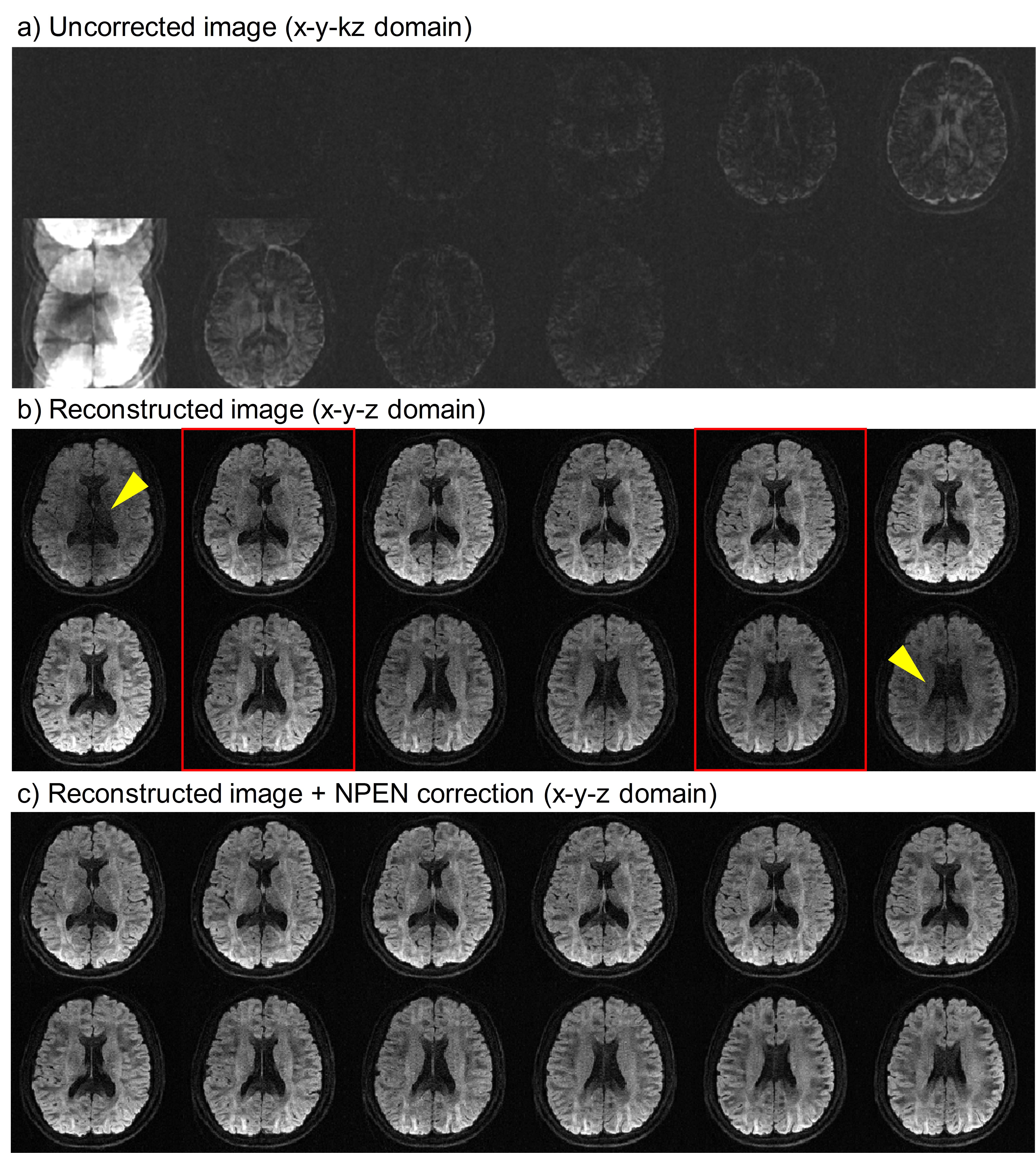
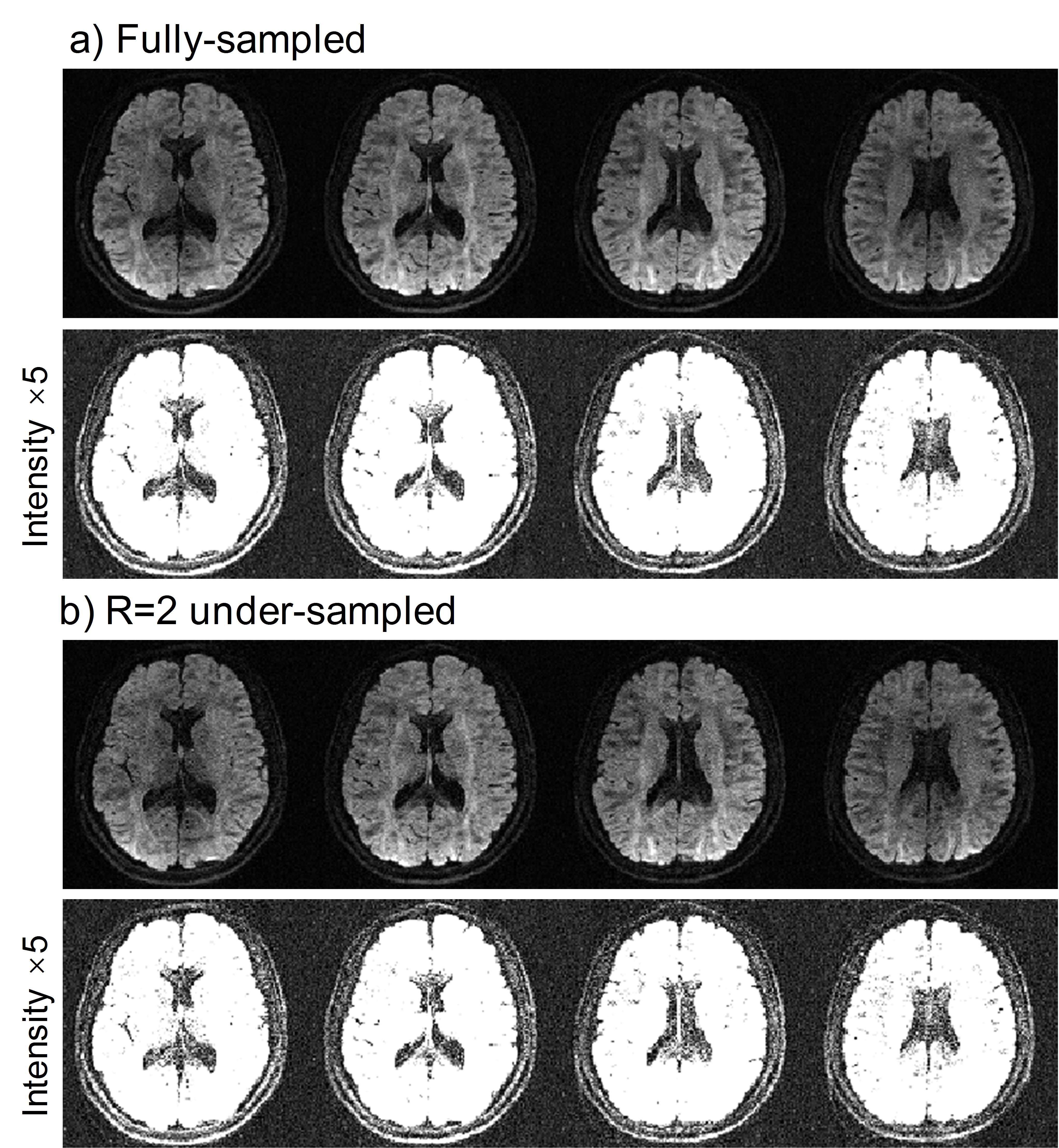
Fig. 4 shows the fully-sampled results. Using the proposed method, all 12 slices in the slab can be recovered, except some slab boundary artifacts (yellow arrow heads). These boundary artifacts are well reduced after NPEN correction (Fig. 4c).
The 2-fold in-plane accelerated results are provided in Fig. 5. The proposed method can successfully recover the under-sampled data, with some SNR loss.
Conclusion
A new POCS-enhanced k-space reconstruction method has been demonstrated for 3D multi-slab diffusion imaging. Quantitative analysis and comparison will be included in the future work.Acknowledgements
No acknowledgement found.References
1. Engstrom M, Skare S. Diffusion-weighted 3D multislab echo planar imaging for high signal-to-noise ratio efficiency and isotropic image resolution. Magn Reson Med 2013;70:1507-1514.
2. Van AT, Aksoy M, Holdsworth SJ, Kopeinigg D, Vos SB, Bammer R. Slab profile encoding (PEN) for minimizing slab boundary artifact in three-dimensional diffusion-weighted multislab acquisition. Magn Reson Med 2015;73:605-613.
3. Wu W, Koopmans PJ, Frost R, Miller KL. Reducing slab boundary artifacts in three-dimensional multislab diffusion MRI using nonlinear inversion for slab profile encoding (NPEN). Magn Reson Med 2016;76:1183-1195.
4. Chang HC, Hui ES, Chiu PW, Liu X, Chen NK. Phase correction for three-dimensional (3D) diffusion-weighted interleaved EPI using 3D multiplexed sensitivity encoding and reconstruction (3D-MUSER). Magn Reson Med 2017:n/a-n/a.
5. Anderson AW, Gore JC. Analysis and correction of motion artifacts in diffusion weighted imaging. Magn Reson Med 1994;32:379-387.
6. Miller KL, Pauly JM. Nonlinear phase correction for navigated diffusion imaging. Magn Reson Med 2003;50:343-353.
7. Ma X, Zhang Z, Dai E, Guo H. Improved multi-shot diffusion imaging using GRAPPA with a compact kernel. Neuroimage 2016;138:88-99.
8. Chu ML, Chang HC, Chung HW, Truong TK, Bashir MR, Chen NK. POCS-based reconstruction of multiplexed sensitivity encoded MRI (POCSMUSE): A general algorithm for reducing motion-related artifacts. Magn Reson Med 2015;74:1336-1348.
9. Dai E, Ma X, Zhang Z, Yuan C, Guo H. The Effects of Navigator Distortion Level on Interleaved EPI DWI Reconstruction: A Comparison Between Image and K-Space Based Method. In Proceedings of the 24th Annual Meeting of ISMRM, Singapore, 2016. Abstract 0208.
10. Griswold MA, Jakob PM, Heidemann RM, Nittka M, Jellus V, Wang J, Kiefer B, Haase A. Generalized autocalibrating partially parallel acquisitions (GRAPPA). Magn Reson Med 2002;47:1202-1210.
Figures