4906
Navigator-less manifold recovery of cardiac data using iterative SToRM1Electrical and computer Engineering, University of Iowa, Iowa City, IA, United States, 2Electrical and COmputer Engineering, University of Iowa, Iowa City, IA, United States, 3Cardiology, University of Iowa, Iowa City, IA, United States, 4Electrical and computer Engineering, University of Iowa, Iow City, IA, United States
Synopsis
Self-gated acquisitions, which rely on navigator acquisitions, can offer shortened scan time and can enable cardiac imaging of patients who cannot hold their breath; they are emerging as promising alternatives to breath-held protocols. A challenge with such schemes is the inefficiencies associated with the navigator acquisition, as well as the need for complex and heuristic processing of the navigator signals to accurately determine the cardiac and respiratory phases. The focus of this work is to introduce a navigator-less acquisition and reconstruction strategy, built upon our recent work termed as SToRM, which exploits the manifold structure of images. The proposed framework eliminates the need for navigators in SToRM, in addition to enabling spatially localized manifold modeling, where the manifold structure can vary depending on the spatial structure.
Introduction
In the recent years, there has been significant interest in developing free breathing and ungated methods to acquire cardiac functional MRI data, which improve the compliance and comfort of several patients, including pediatric and obese subjects [1-2]. Many of the current methods either rely on self-gating, navigators, or physiological signals (ECG and respiratory bellows) to bin the k-space data into specific cardiac and respiratory phases, followed by a constrained reconstruction strategy of the binned data. The recent SToRM [3] uses an alternate strategy of implicit motion-resolved reconstruction to recover the dynamic data with cardiac and respiratory motion without explicit binning. SToRM exploits the property that the images in a free-breathing and ungated dataset are points on a smooth and low-dimensional manifold; the smoothness regularization of the images on the manifold assuming the graph Laplacian operator is used to recover the dataset from highly undersampled measurement. The graph Laplacian matrix is estimated from special navigators. While SToRM offers good reconstructions, the need for specialized radial navigators translates to low scanning efficiency; specifically, ~40% of the scan time is devoted to the acquisition of the navigators. Another challenge is that SToRM is not capable of exploiting the spatial variations in the manifold structure. Since motion in different spatial regions of the image is different (e.g cardiac & respiratory motion), it is better to use different Laplacian matrices for different regions. The main focus of this abstract is to introduce a generalized SToRM algorithm, which does not require navigators and can also account for the spatially varying manifold structure. The new formulation translates to lower data-demand, which further reduces the scan time.Methods
We formulate the proposed framework to recover the dynamic dataset F as the following optimization problem:
\begin{equation}\mathbf F^{*} = \arg \min_{\mathbf F} \|\mathcal A (\mathbf F)-\mathbf B\|^{2}_{2}+ \lambda_{1} \sum_{\mathbf r_k} ~\underbrace{ \sum_{i=1}^{N_{f}} \sum_{j=1}^{N_{f}} \varphi\left(\|\mathbf P_{\mathbf r_k}(\mathbf f_i) - \mathbf P_{\mathbf r_k}(\mathbf f_j)\|\right)}_{\mathcal C(\mathbf r_k)},\end{equation}
The second term is the proposed manifold smoothness penalty where both image patches or image frames can be used to estimate the manifold structure. Here, $$$\mathcal P_{\mathbf r}(\mathbf f_i)$$$ is a patch extraction operator, which extracts a square shaped 2-D image patch of dimension $$$(N+1)\times (N+1)$$$, centered at the spatial location $$$\mathbf r$$$ from $$$\mathbf f_i$$$, which is the $$$i^{\rm th}$$$ frame in the dataset. The main differences between this formulation and (3) is the use of unweighted robust distances between patches in the dataset, rather than the weighted quadratic distances between images used in (3). We choose the distance metric as $$$\varphi(t)= 1-\exp(-t^2/2\sigma^2)$$$.We use an alternating algorithm, which alternates between estimating the weights as \begin{equation}w_{i,j}(\mathbf r) = \exp\left(-\frac{\|\mathcal P_{\mathbf r_k}(\mathbf f_i) - \mathcal P_{\mathbf r_k}(\mathbf f_j)\|^2}{2\sigma^2}\right)\end{equation}and updating the images as \begin{equation}\mathbf F^{*} = \arg \min_{\mathbf F} \|\mathcal A (\mathbf F)-\mathbf B\|^{2}_{2}+ \lambda_{1} \sum_{\mathbf r_k} ~\sum_{i=1}^{N_{f}} \sum_{j=1}^{N_{f}} w_{i,j}(\mathbf r)~\|\mathcal P_{\mathbf r_k}(\mathbf f_i) - \mathcal P_{\mathbf r_k}(\mathbf f_j)\|^2\end{equation} Note that the above equation is equivalent to SToRM, when a single patch is considered; the main difference is that the weights are derived from the images themselves rather than navigators, which facilitates the use of local manifold structure. The above alternating strategy is inspired by PRICE (4), where we used similar approaches to exploit the similarity of patches in adjacent images. We typically use 3-4 iterations.
Results
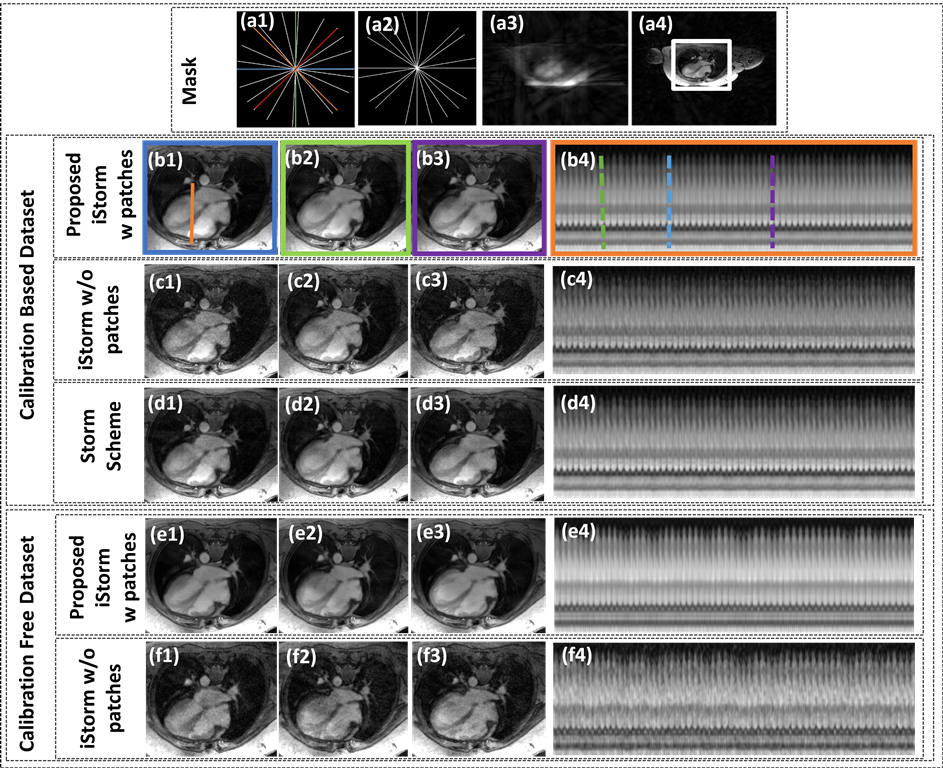
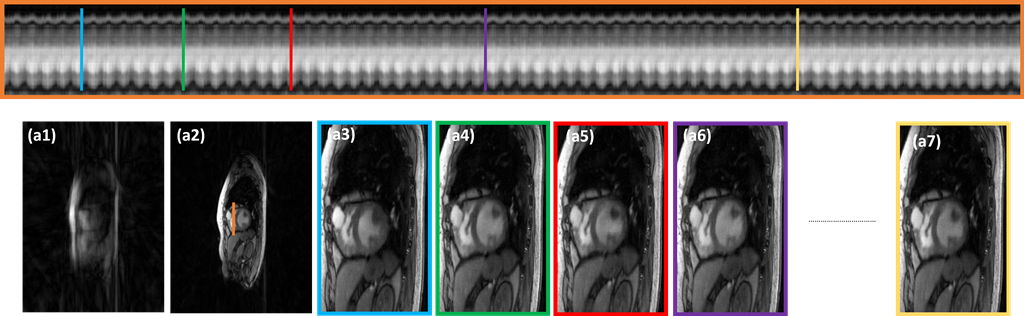
The proposed scheme is validated on two free-breathing ungated datasets acquired using FLASH sequence on Siemens 3T Skyra scanner at the University of Iowa Hospital. The datasets were acquired with 10 radial lines per frame, with and without using navigators. The sequence parameters were: TR/TE 4.3/1.92 ms, FOV 300mm, Base resolution 256, Bandwidth 574 Hz/pix. 10000 spokes of k-space were collected in 43 s. Figure 1 shows the recovery of the proposed scheme iSToRM, with and without using patches, vs the state-of-the-art navigator-based SToRM. The calibrated based dataset has 4 navigator signals as shown in a(1) while the calibration-free dataset is acquired without navigators a(2). Figure 2 shows the recovery of another dataset acquired from a different patient using the patch-based scheme. The proposed patch-based framework provides comparable image quality to SToRM with fewer motion artifacts and without relying on any navigator signals.
Conclusion
The experiments demonstrate the potential of the proposed scheme in the recovery of ungated & free breathing dynamic MRI data with considerable motion and high undersampling factor without the need for any specially designed navigator or gating signals. The ability of the proposed scheme to work without navigators makes it more flexible to be applied to data acquired from Cartesian or golden angle sampled sequences, which become available nowadays on clinical scanners.Acknowledgements
This work is supported by NIH 1R01EB019961-01A1.References
1: Feng L, et al. XD-GRASP: Golden-angle radial MRI with the reconstruction of extra motion-state dimensions using compressed sensing. MRM. 2016.
2: HJ Huang et al. Super-resolution hyperspectral imaging with unknown blurring by low-rank and group-sparse modeling, IEEE ICIP, 2015.
3: Poddar S et al. Dynamic mri using smoothness regularization on manifolds (storm). IEEE TMI, 2016.
4: Mohsin YQ, et al. Accelerated dynamic mri using patch regularization for implicit motion compensation. MRM, 2016.
5: Yang Z et al. Nonlocal regularization of inverse problems: a unified variational framework. IEEE TIP 2013.
Figures