4789
Implementation of Cardiac MRF in Gadgetron for Online ReconstructionJames Ahad1, Wei-Ching Lo2, Jesse Hamilton2, Dominique Franson2, Yun Jiang3, and Nicole Seiberlich2
1Biomedical Engineering, Case Western Reserve University, Cleveland, OH, United States, 2Case Western Reserve University, Cleveland, OH, United States, 3Radiology, University Hospitals, Cleveland, OH, United States
Synopsis
Cardiac MRF is a unique MRF technique that requires a new dictionary for each acquisition to account for heart rate variability. Dictionary simulation presents a barrier for accessibility to cardiac MRF techniques due to the lack of tools at the scanner. To this end, Bloch simulation tools were developed on the Gadgetron platform to allow for online dictionary simulation and pattern matching reconstruction. Results between prior MATLAB implementations and Gadgetron implementation were in agreement. Future work in optimization may allow for data feedback from the scanner, reducing the need for additional scan time for accurate quantification of T1 and T2 maps.
Purpose
Cardiac MRF (cMRF) (1, 2) is an MRF technique that enables simultaneous acquisition of T1, T2, and M0 maps in the heart. cMRF is unique in that a new MRF dictionary must be simulated after every scan in order to incorporate subject- and scan-specific variations in heart rate. Gadgetron (3) is an open-source modular reconstruction platform that allows complex reconstruction algorithms to interface directly with MRI scanners. Previously, MRF has been implemented in the Gadgetron for brain and prostate mapping (4). In those studies, the MRF dictionary was pre-computed once and used to generate maps for all subsequent acquisitions. In this study, Bloch equation simulation tools were implemented in Gadgetron to allow for online dictionary simulation and pattern matching at the scanner to enable Gadgetron to be employed for cMRF reconstructions.Methods
Cardiac MRF data were acquired on a 3T Skyra scanner (Siemens Healthineers, Erlangen, Germany) in the short-axis view during a breathhold using previously described sequence parameters (1, 2, 5). Dictionary generation and tissue property map reconstructions were performed on the conventional MATLAB-Mex C platform and as well as the Gadgetron platform. The Gadgetron system specifications were: 8GB Nvidia GeForce GTX 1080 Graphics Card, 4-core 5.1GHz i7 7700k processor and 32 GB of 2400 MHz DDR4 memory. The cMRF dictionary was simulated on the Gadgetron platform using the Bloch equations with T1 values of [20:10:2000 2020:20:3000 3050:50:4000] and T2 values of [4:2:100 105:5:200 210:10:300 320:20:500] for a dictionary size of 22,866 entries. After L-2 normalization, the dictionary was compressed using the SVD along the time dimension from 750 time points to 46 temporal basis vectors (6). The k-space data were PCA coil compressed and SVD compressed before NUFFT. For NUFFT, the MATLAB-Mex C reconstruction used the Fessler toolbox (7), and the Gadgetron reconstruction used the Sorensen algorithm (8). For the Gadgetron reconstruction, the resulting aliased images are adaptive coil combined (9). Tissue property maps were generated by dot product matching between the pixel timecourses and the dictionary (10). The root mean square error (RMSE) between the cMRF dictionaries calculated in MATLAB and on the Gadgetron were computed before SVD compression. In addition, the mean T1 and T2 of the heart wall was obtained from manually drawn ROIs on the parameter map outputs from MATLAB and Gadgetron.Results
cMRF dictionary simulation time was 1220s on MATLAB-Mex C and 2146s on Gadgetron. The RMSE between dictionaries was 7.6x10-6, indicating that the Bloch equation simulation on the Gadgetron platform yields equivalent dictionary entries to MATLAB. The tissue property maps show good agreement for T2 with slight differences in T1 values for the heart wall (Table 1). Figure 1 shows T1, T2 and M0 maps generated using both Gadgetron and MATLAB-Mex C reconstructions.Discussion and Conclusion
Cardiac MRF requires the dictionary to be simulated after data collection to account for heart rate variations, and thus this step is essential for on-line tissue property mapping in the heart with MRF; because clinical translation of MRF requires on-scanner reconstruction without the cumbersome transfer of data to an off-line reconstruction engine, this work opens the way for clinical adoption of cMRF. Tissue property maps from both reconstruction platforms showed good agreement with each other, with variation due to differences in pulse sequence modeling and the gridding algorithm. While the Gadgetron-based MRF dictionary simulation had slower performance, it competed against highly optimized MATLAB-Mex C code. While MATLAB-Mex C code is efficient, it is narrow in application. In contrast, the Gadgetron-based cMRF reconstruction can be employed at any modern MRI scanner. The availability of such a vendor-independent cardiac MRF reconstruction system will enable the evaluation of cMRF at other clinical sites. In addition, the Gadgetron reconstruction has considerable space for further optimization, particularly via GPU acceleration. With on-the-fly dictionary generation capabilities, it may be possible to generate the MRF dictionary in real-time to determine when enough data have been collected for accurate T1 and T2 quantification in order to reduce MRF data collection times.Acknowledgements
R01HL094557, R01DK098503, R01EB016728, Siemens Medical Solutions.References
: (1) Hamilton et al, MRM 2017. (2) Hamilton et al, JCMR 2016;18:W1. (3) Hansen et al, MRM 2012. (4) Lo et al. Proc. of ISMRM Workshop on MRF 2017. (5) Hamilton et al. Proc. Of ISMRM Workshop on MRF 2017. (6) McGivney et al. IEEE TMI 2014. (7) Fessler et al, IEEE TSP 2003. (8) Sorensen et al. IEEE TMI 2008. (9) Inati et al. Proc. of ISMRM. 2013, #2672. (10) Ma et al. Nature. 2013.Figures
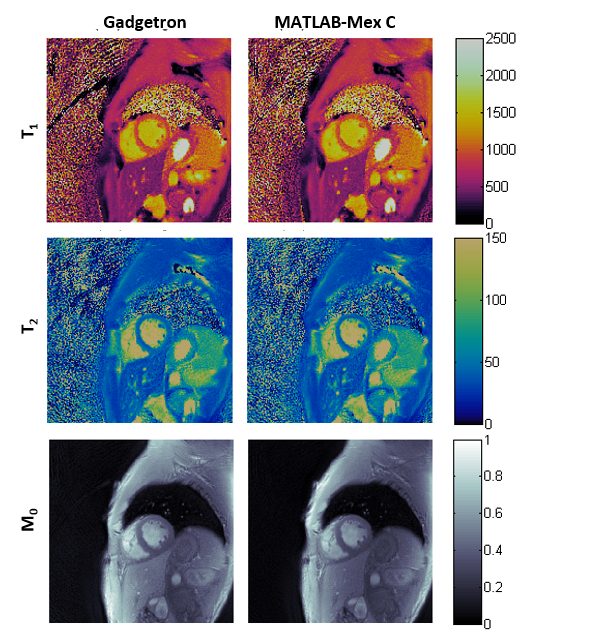
Figure 1:
T1,T2, and M0 maps for Gadgetron and MATLAB-Mex C
reconstruction.
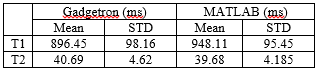
Table 1. Differences in Measured T1 and T2 of Heart Wall