4266
Acceleration of the Cartesian acquisition of MR fingerprinting using the keyhole acquisition and view-sharing reconstruction1Institute of Applied Physics, University of Tsukuba, Tsukuba, Japan
Synopsis
MR fingerprinting (MRF) is a promising approach that enables quantification of multiple tissue parameters at a single scan. MRF uses spiral sampling which requires a high fidelity of gradient hardware. Meanwhile, MRF with the Cartesian sampling is feasible for conventional scanners with the moderate hardware fidelity, but it comes at the cost of the elongation of the acquisition time. Here we propose an acceleration method for the Cartesian MRF acquisition that enables the 8-fold acceleration. The quantitative errors and undersampling artifacts in the T1 and T2 maps are alleviated by using the keyhole acquisition and view-sharing reconstruction.
INTRODUCTION
MR fingerprinting (MRF) 1 is a promising approach that enables quantification of multiple tissue parameters at a single scan. MRF data are often acquired by a series of variable-density spiral interleaves to reduce the acquisition time. Thus, a high fidelity of gradient hardware is required to ensure robust results, which makes MRF inapplicable in some conventional scanners with the low or moderate gradient fidelity. Meanwhile, MRF with the Cartesian sampling 2 is feasible for those conventional scanners with small errors, but it comes at the cost of the elongation of the acquisition time. Here we propose an acceleration method for the Cartesian MRF acquisition that enables the 8-fold acceleration. The quantitative errors and undersampling artifacts in the T1 and T2 maps are alleviated by using the keyhole acquisition and view-sharing reconstruction.METHOD
The inversion-recovery FISP sequence was used for MRF scans. The number of time frames was 600. Echo time was held constant (5 ms). Flip angle was varied pseudo-randomly and sinusoidally (5 to 90o) and repetition time was varied using a Perlin noise pattern (20 to 30 ms). All experiments were performed on a home-built MRI system consisting of the 1.5T/280mm horizontal bore superconducting magnet (JMBT-1.5/280/SS, JASTEC, Kobe, Japan), shim and gradient coils, a birdcage coil, and a digital MRI console 3 (DTRX6, MRTechnology, Tsukuba, Japan).
The MRF data were acquired with the Cartesian keyhole sampling and reconstructed with view-sharing technique (KH+VS). The phase-encode lines near the k-space center (2 lines in this study) were chosen for every time frames. The peripheral encode lines in one frame were randomly chosen with the variable k-space density in such a way that each lines were not overlapped with those of the neighboring frames within the distance of N along the time dimension. Then the image-series were reconstructed using view-sharing technique in which unacquired k-space data were borrowed from the nearest frame along the time dimension with an acquired data at that location. The dictionary with a range of T1 (10-1500 ms, 150 points), T2 (5-1000 ms, 150 points), and B1/B1(90o) (0.6-1.2, 30 points) was generated using an extended phase graph.
For comparison, two acceleration strategies were tested. The first one was the random acquisition allowing overlap with the neighboring frames and view-sharing reconstruction (RS+VS) 4. The second one was the keyhole acquisition but with sliding-window reconstruction 5 (KH+SW) in which k-space data at a time point were combined with the data of multiple consecutive time frames (N frames). For the SW reconstruction, the mixed-contrast dictionary was reformulated from the aforementioned dictionary by applying a moving averaging filter with the window size of N.
A phantom consisting of 10 test tubes of MnCl2 or GdCl3 solutions with different T1 and T2 values was used for phantom validation. For in vivo measurements, the left hand and wrist of a 23-year-old male was imaged.
RESULTS AND DISCUSSION
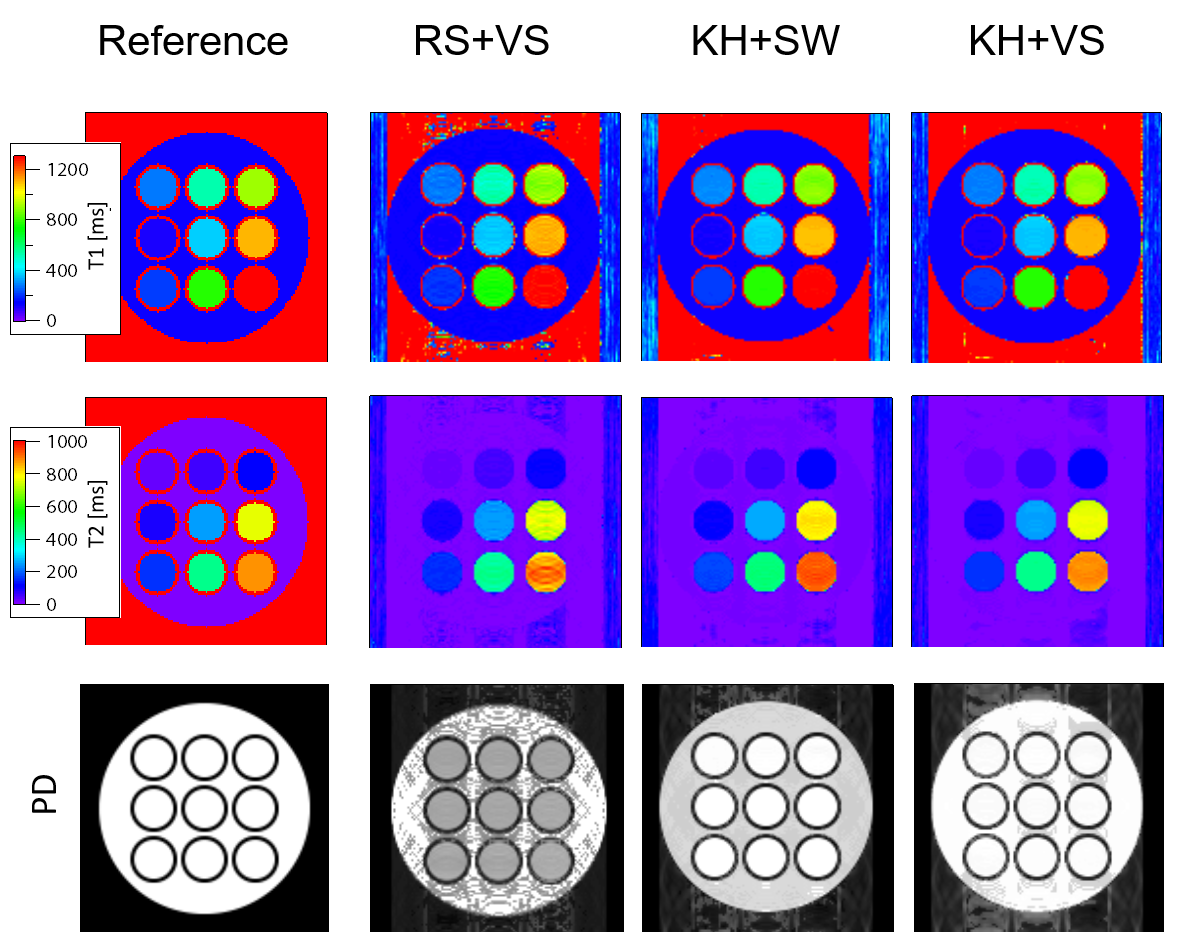
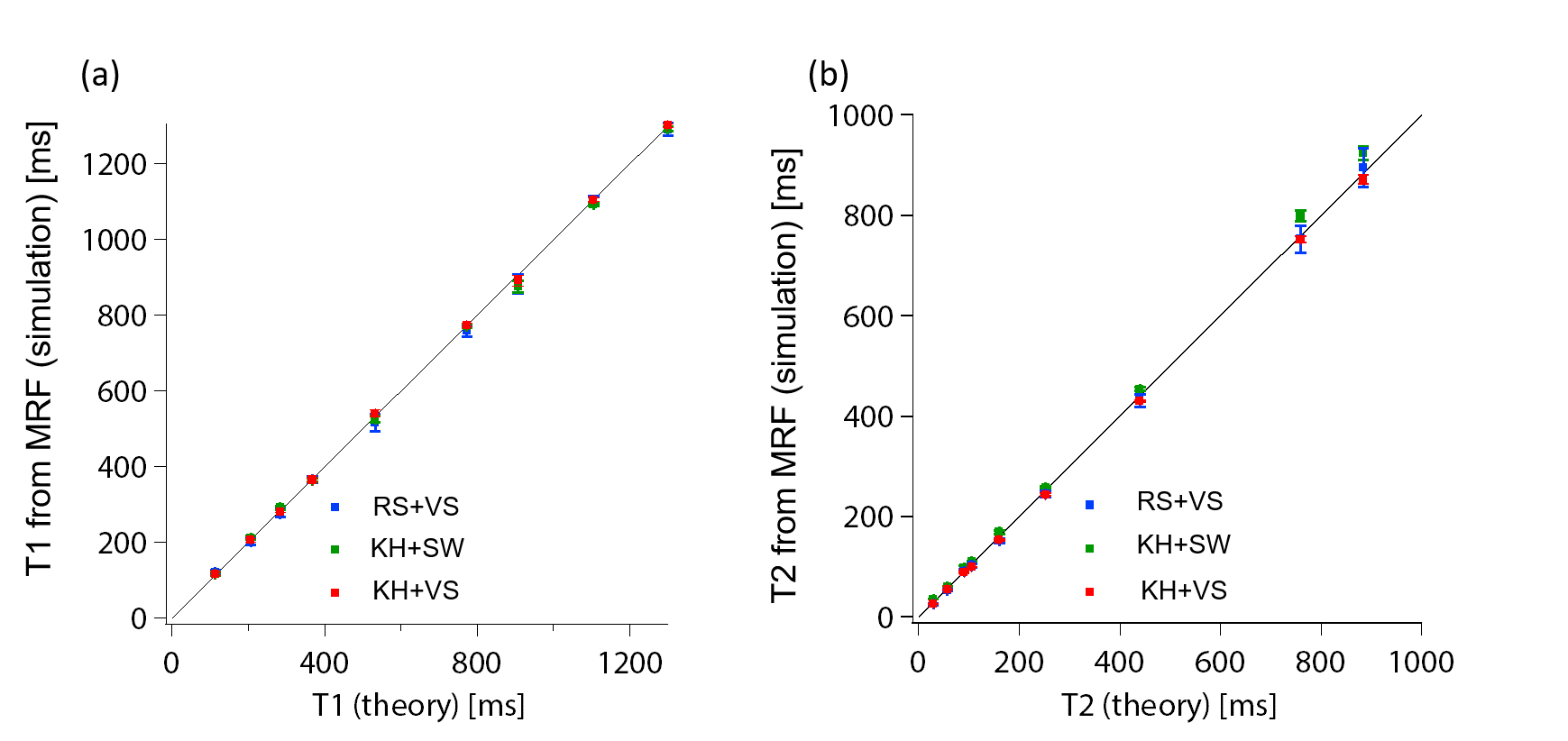
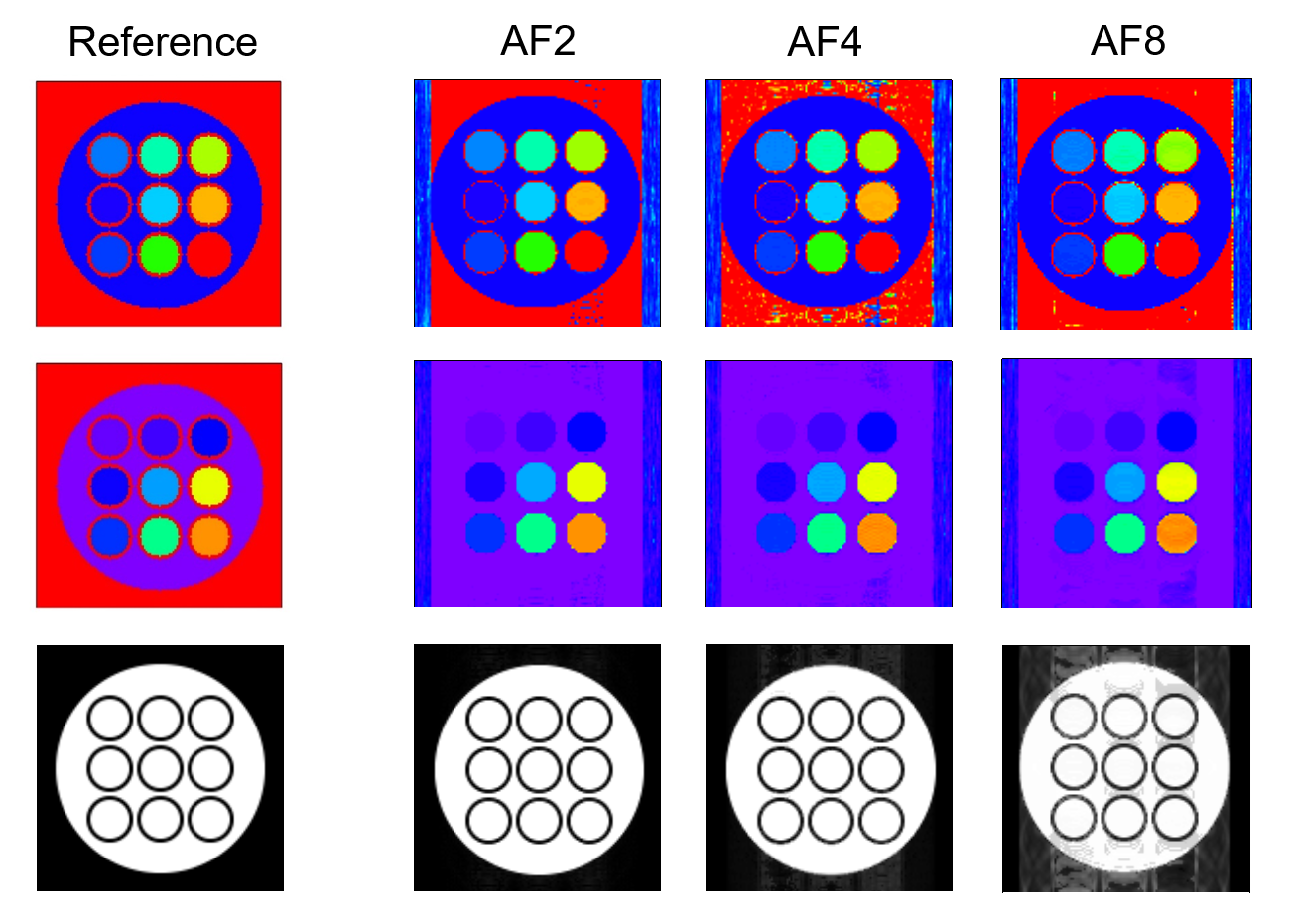
Figures 1 and 2 show simulated MRF results of the phantom acquired with the acceleration factor (AF) = 8. The T1 and T2 maps from RS+VS showed ghosting artifacts due to the undersampling, and those from KH+SW exhibited less artifacts but showed the slight overestimation of T2 (Fig. 2(b)). The proposed KH+VS method showed reduced artifacts and the estimated T1 and T2 values were accurate. These results reveal that the keyhole acquisition without overlapping largely reduces the aliasing artifacts, and the view-sharing reconstruction gives the accurate T1 and T2 estimation. Figure 3 shows the simulation results for different AF values. The aliasing gradually increased with AF, but was suppressed even for AF = 8.
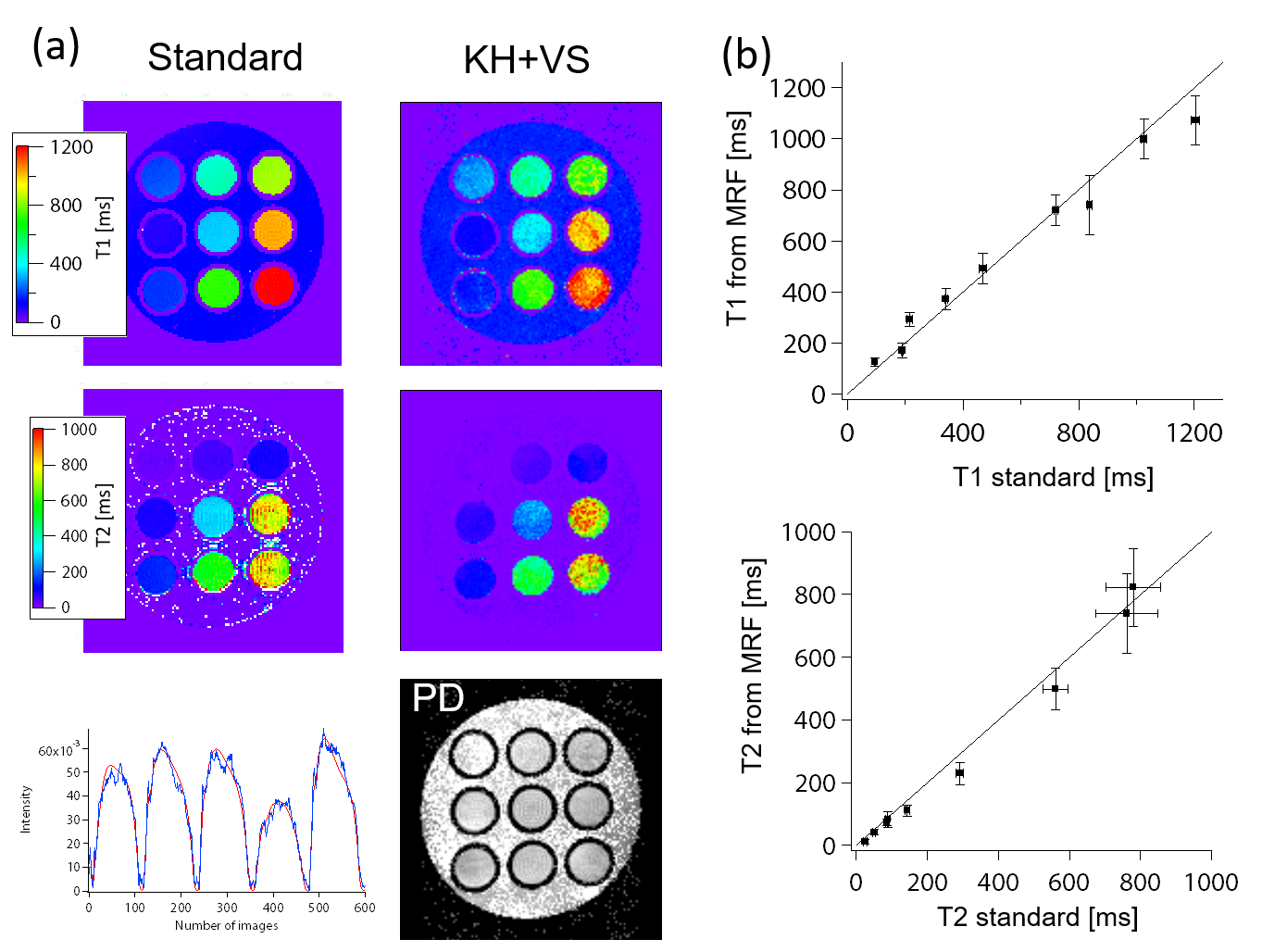
Figure 4 shows the experimental results acquired with the proposed KH+VS with AF = 8. Although the banding artifacts due to the off-resonance appeared in the estimated maps, the estimated T1 and T2 values corresponded to those from standard methods.
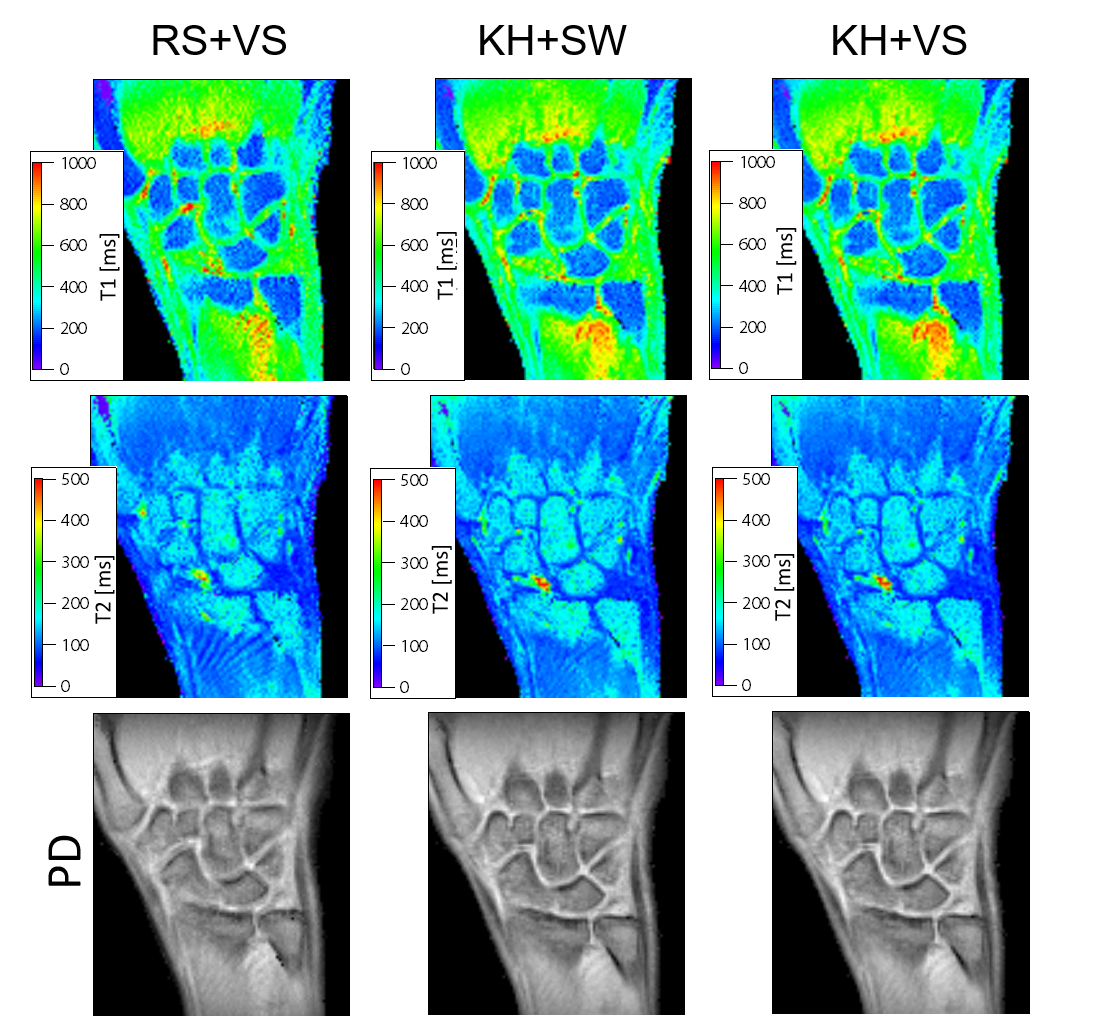
Figure 5 shows the results of in vivo human hand study (with AF = 8). The keyhole sampling strategies (KH+SW, KH+VS) were superior to the random sampling (RS+VS); the proton density map from RS+VS showed the blurring-like artifact in the carpal bones, which would be caused by the aliasing as observed in the phantom study. The T2 values in the carpal bones estimated from KH+SW showed slightly high values than those from KH+VS, corresponding to the phantom study.
CONCLUSION
We proposed the acceleration strategy for Cartesian MRF based on the keyhole acquisition and view-sharing reconstruction. We verified that the superiority of the proposed strategy stands out.Acknowledgements
No acknowledgement found.References
1. Dan Ma et al., Magnetic resonance fingerprinting, Nature 2013; 495: 187-193.
2. Y. Gao et al., Preclinical MR fingerprinting (MRF) at 7T: effective quantitative imaging for rodent disease models, NMR Biomed. 2015; 28: 384-394.
3. S. Hashimoto et al, Development of a pulse programmer for magnetic resonance imaging using a personal computer and a high-speed digital input–output board, Rev. Sci. Instrum. 2012; 83: 053702.
4. G. Buonincontri et al., MR Fingerprinting with simultaneous B1 estimation, Magn. Reson. Med. 2016; 76: 1127-1135.
5. X. Cao et al., Robust sliding-window reconstruction for accelerating the acquisition of MR Fingerprinting, Magn. Reson. Med. 2017; 78: 1579-1588.
Figures