4208
Measuring Eddy Currents Induced by Switching Gradient/Shim Currents1Max Planck Institute for Biological Cybernetics, Tuebingen, Germany, 2IMPRS for Cognitive and Systems Neuroscience, Eberhard-Karls University of Tuebingen, Tuebingen, Germany, 3Department of Physics, Ernst-Moritz-Arndt University Greifswald, Tuebingen, Germany
Synopsis
In this work, we measured eddy currents for a very high order B0 shim system. The eddy currents were measured using two methods: a low-resolution B0 mapping sequence and a NMR field camera. The high temporal resolution of the field camera allowed the eddy currents to be corrected using a digital pre-emphasis setup.
Introduction
Fast switching currents in devices within a magnetic field can cause eddy currents that results in concomitant fields. Eddy currents are often induced in MRI due to fast switching of currents in gradient/shim coils. If the induced eddy currents are large, this can result in a variety of different artifacts such as: image distortion, blurring and ghosting [1,2]. Furthermore, eddy currents in the coils can reduce their speed and efficiency [3].
Large changes in gradient/shim currents result in more severe eddy currents. Measuring eddy currents can be useful for artifact correction in image reconstruction post-processing [4] or for compensation using pre-emphasis [5,6]. In recent literature, the two most commons methods for eddy current measurement is to use a fast B0 mapping sequence (or projection-based B0 mapping) [5,7] or a NMR field camera [6,8].
In this work, we use both methods to measure eddy currents in a very high order B0 shim system (up to 4th degree) and further use the measured eddy currents for pre-emphasis compensation.
Methods
An insert shim from Resonance Research Inc. (Billerica, MA) with up to full 4th degree and partial 5th/6th degree spherical harmonic shim terms was used for this study. A current of 1.0A was applied to each shim coil consecutively and the fields were measured using 1) a fast, low-resolution B0 mapping sequence and 2) a custom-built NMR field camera. All measurements were performed on a Siemens 9.4T Magnetom whole-body human MRI scanner (Erlangen, Germany).
A dual-echo 3D GRE sequence with ΔTE=1ms and a matrix size of 32x32x4 was used to acquire the B0 maps of each shim field. The maps were acquired with a temporal resolution of 600ms for a duration of 10 seconds. The shim fields were then measured again using a field camera consisting of twelve 1H field probes (Figure 1a). Since the field camera did not have enough probes to measure a sufficient number of spatial points, the experiment was repeated multiple times with the field camera moved to different positions each time. The positions of all the 96 spatial points measured by the camera are shown in Figure 1b. The measurements were acquired using a FID sequence with 25ms TR and a total duration of 7 seconds. The shim field measurements acquired from both the B0 mapping sequence and field camera were decomposed using up to 4th degree spherical harmonic functions for comparison.
The system dynamics and eddy currents of the insert shim measured from the field camera were then used for pre-emphasis. The system was modelled using 2nd order transfer functions and digitized using the zero-order hold transform. The digital filter was then implemented on a microcontroller and updated through a digital-to-analog converter and pre-amplifier circuitry to drive the shim amplifiers.
Results/Discussion
Some of the B0 maps acquired from the B0 mapping sequence are shown in Figure 2 to illustrate what the low-resolution B0 maps looked like for some of the 2nd, 3rd and 4th degree shim terms. Figure 3 shows a comparison of some of the shim terms measured using the B0 mapping sequence and the field camera. The steady-state behaviour measured using the two methods show good agreement. However, the B0 mapping sequence has a lower temporal resolution and is unable to capture the finer dynamic behaviour in the transient period.
Finally, in Figure 4 we show the shim fields measured when a digital pre-emphasis filter was used. The slow transient effects caused by eddy currents have been compensated.
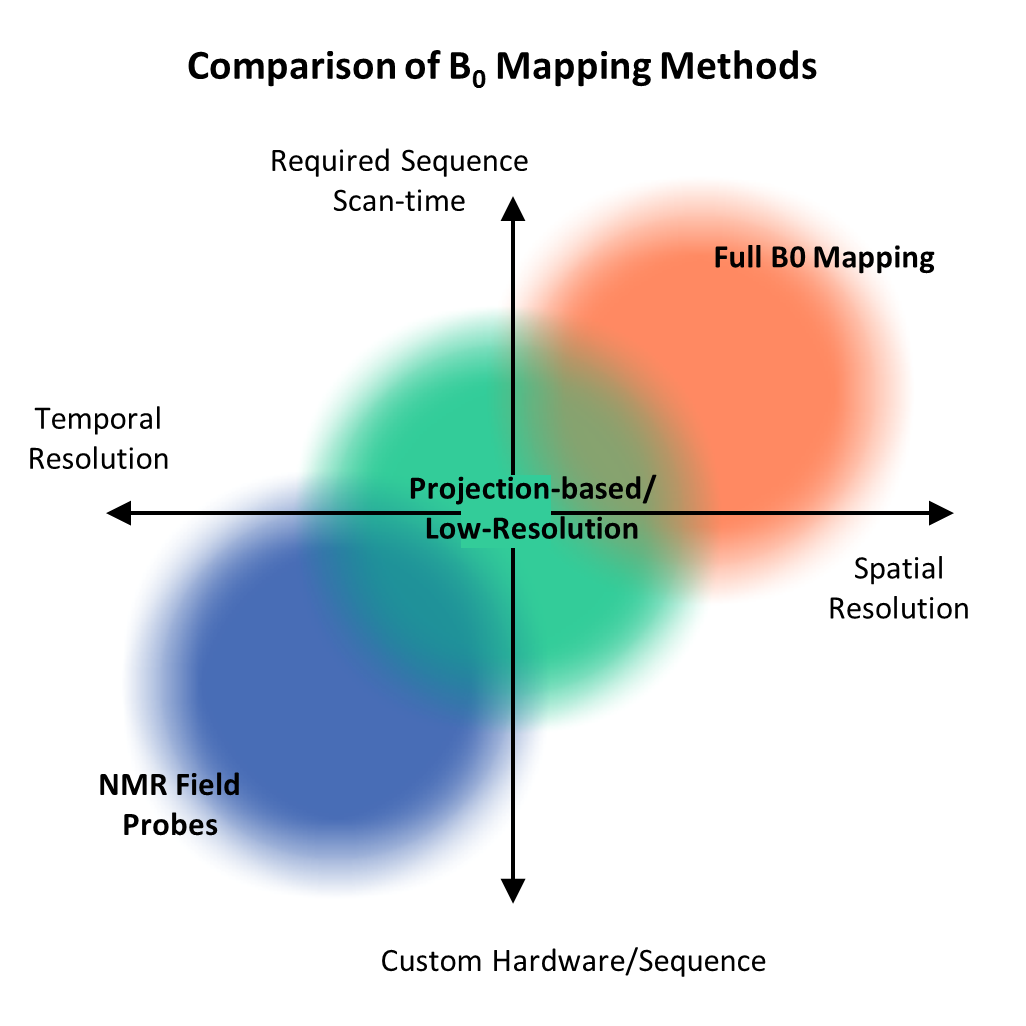
A comparison of two methods for measuring eddy currents and field dynamics shows that although B0 mapping sequences have higher spatial resolution, they are relatively slow and do not have good temporal resolution. Although field cameras have high temporal resolution, they have lower spatial resolution. Even with more spatial samples, there is still a loss of spatial accuracy [9]. Furthermore, field cameras require extra hardware. Nevertheless, the high temporal resolution allows us to correct for the eddy current effects quite well using a pre-emphasis filter. The comparison between the two methods is summarized in Figure 5.
In conclusion, for spherical harmonic-based shim terms, a field camera is preferable for eddy current measurement due to its high temporal resolution.
Conclusion
In this work, we measured the effects of eddy currents induced by shim coils (with very high order terms). The eddy currents were measured using both a B0 mapping sequence and a field camera. The higher temporal resolution of the field camera allowed the eddy currents to be very well compensated despite the slight loss of accuracy due to lower spatial resolution.Acknowledgements
No acknowledgement found.References
[1] P Jezzard, AS Barnett, C Pierpaoli, “Characterization of and correction for eddy current artifacts in echo planar diffusion imaging”, Magnetic Resonance in Medicine, 1998.
[2] MA Horsfield, “Mapping eddy current induced fields for the correction of diffusion-weighted echo planar images”, Magnetic Resonance Imaging, 1999.
[3] HM Gach, et al., “A programmable pre-emphasis system”, Magnetic Resonance in Medicine, 1996.
[4] SJ Vannesjo, et al., “Retrospective correction of physiological field fluctuations in high-field brain MRI using concurrent field monitoring”, Magnetic Resonance in Medicine, 2015.
[5] C Juchem, et al., “Dynamic shimming of the human brain at 7Tesla”, Concepts Magn. Reson. Part B, 2010.
[6] A Fillmer, et al., “Fast iterative pre-emphasis calibration method enabling third-order dynamic shim updated fMRI”, Magnetic Resonance in Medicine, 2016.
[7] KM Koch, et al., “Dynamic shim updating on the human brain”, Journal of Magnetic Resonance, 2006.
[8] SJ. Vannesjo, et al., “Field camera measurements of gradient and shim impulse responses using frequency sweeps”, Magnetic Resonance in Medicine, 2014.
[9] P Chang, et al. "Limitations of NMR Field Cameras for B0 Field Monitoring" ISMRM 2017.
Figures