4115
MR-assisted PET reconstruction in the presence of respiratory motion: A phantom study1Washington University in St. Louis, St. Louis, MO, United States
Synopsis
Simultaneous PET/MR provides an unprecedented opportunity for motion correction. We aimed at developing an integrated MR-assisted PET motion correction method which would allow accurate PET quantification in the presence of respiratory motion. In this study, we evaluated the impact of motion correction on lesions of various sizes by using a deformable motion phantom. A static scan was used as the ground truth for PET activity. The combined MR and PET motion correction recovered the activity from 55% to >97% of the static scan activity.
Introduction
PET imaging can be severely affected by respiratory motion1,2 . Simultaneous PET/MR imaging provides an unprecedented opportunity for motion correction3,4. In this regard, we aimed at developing an integrated MR-assisted PET motion correction method which would allow accurate PET quantification in the presence of respiratory motion. This makes it possible to detect small lesions which would otherwise become undetectable given the blurring caused by motion. We evaluated the performance of the proposed method using a deformable motion phantom by paying special attention to the magnitude of the motion and the size of the lesion. The results show the promise of the method.Methods
For tracking respiratory motion, we developed a self-navigated free breathing MR motion correction method that is robust and fully-automated. The sequence is based on a T1-weighted stack-of-stars spoiled 3D gradient-echo sequence with fat suppression5. The partition encoding is Cartesian, whereas the in-plane acquisition is radial with a constant azimuthal increment of phi = 111.25o. A navigator echo was added for tracking respiratory motion and a novel phase-rotated peak detection scheme was used for estimating motion.
The acquisition parameters were as follows: TE/TR = 1.99 ms/3.84 ms, matrix size = 320 x 320, field of view (FOV) = 240 mm x 240 mm, slab thickness = 163.2 mm, number of partitions = 48, partial Fourier factor = 6/8, reconstructed slices per slab = 96 (yielding a slice thickness of 1.7 mm). The resulting voxel size for the phantom study was 0.75 x 0.75 x 1.7 mm3.
Four spheres with [18F]2-fluoro-2-deoxyglucose (FDG) activity were placed in a deformable motion phantom to mimic FDG avid lesions. The diameters of the spheres were 4.5 mm, 6.75 mm, 7.5 mm and 9 mm. List mode PET data and MR motion correction data were acquired simultaneously in the presence and absence of motion. Respiratory motion was first detected using the self-navigated free breathing MR method. This MR-derived motion was then used to rebin the simultaneously acquired list mode PET data. Motion-corrected and uncorrected PET images were reconstructed using the same motion-corrupted data. On the other hand, the static (no-motion) PET/MR scan was used as the ground truth for PET activity.
For comparison purposes, data-driven motion estimation was also performed based on PET data only, by tracking the center of mass of the four spheres in the sinogram data.
Results
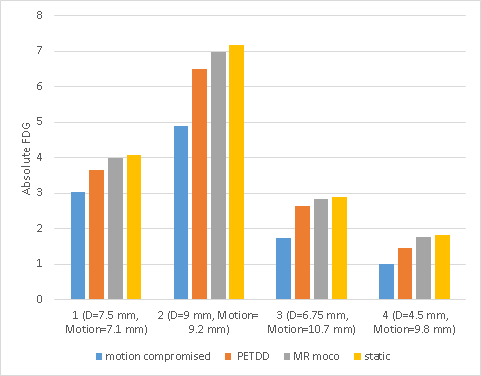
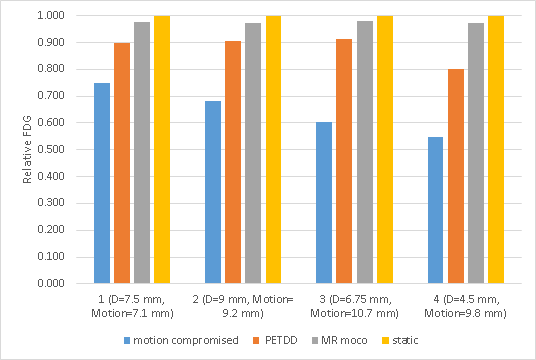
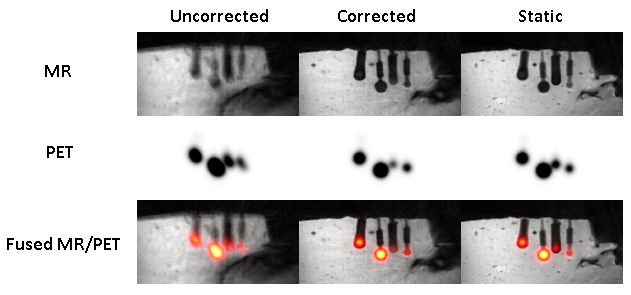
In reference to the static PET, the relative FDG activity measured in the motion-uncorrected PET images were 55% (D=4.5 mm, motion range = 9.8 mm), 60% (D=6.75 mm, motion range = 10.7 mm), 75% (D=7.5 mm, motion range = 7.1 mm) and 68% (D=9 mm, motion range = 9.2 mm) for the four spheres. In contrast, the measured activity became, respectively, 97%, 98%, 98% and 97% after applying the MR-assisted PET motion correction scheme. Figure 1 shows the bar plot of the absolute measurements while Figure 2 depicts the normalized activity with respect to the static experiment. Figure 3 illustrates the images that are obtained by the motion-corrupted and motion-corrected reconstructions, as well as the images from the static experiment.Discussion
The motion of the spheres (signal sources for PET) in this phantom study or the motion of the FDG avid lesions in an in vivo study do not necessarily follow the MR motion signal sources (i.e. the gel in the phantom study and the abdominal organs in the in vivo study) to their full extent. Therefore, MR-derived motion might be slightly different from the actual motion of the main PET sources. It is also worth noting that the data is binned into a small number of respiratory bins. In this respect, motion blurring, albeit small, can still be in place for bins that cover a large physiological range.Conclusion
Depending on the size and the magnitude of motion, motion-compromised PET images can show up to 45% reduction in FDG activity. Our MR-assisted PET motion correction can recover the activity back to >97% of that measured using the static data set. High noise and respiratory motion make it difficult to detect small lesions in PET images. MR-assisted motion correction makes it possible to delineate lesions with significantly higher accuracy regardless of the lesion size.Acknowledgements
No acknowledgement found.References
1. Nehmeh SA, Erdi YE. Respiratory motion in positron emission tomography/computed tomography: a review. Semin Nucl Med. 2008;38:167–176.
2. Bai W, Brady M. Motion correction and attenuation correction for respiratory gated PET images. IEEE Trans Med Imaging. 2011;30:351–365.
3. Guérin B, Cho S, Chun SY, et al. Nonrigid PET motion compensation in the lower abdomen using simultaneous tagged-MRI and PET imaging. Med Phys. 2011;38:3025–3038.
4. Chun SY, Reese TG, Ouyang J, et al. MRI-based non-rigid motion correction in simultaneous PET/MRI. J Nucl Med. 2012;53:1284–1291.
5. Grimm R, Fürst S, Souvatzoglou M, et al. Self-gated MRI motion modeling for respiratory motion compensation in integrated PET/MRI. Med. Image Anal. 2015;19(1):110–120.
Figures