4085
Evaluating the influence of motion on FISP-MRF1Siemens Healthcare GmbH, Erlangen, Germany, 2Max Schaldach-Stiftungsprofessur für Biomedizinische Technik, Friedrich-Alexander-Universität Erlangen-Nürnberg, Erlangen, Germany
Synopsis
Magnetic Resonance Fingerprinting (MRF) is an MR technique that generates parameter maps by matching pseudo randomly generated MR signals to a precalculated dictionary. MRF sequences in general consist of a long series of closely spaced excitations. An assumption underlying MRF is that a partially motion-corrupted signal is not able to significantly alter results. Corrupted signal segments are supposed to have no respective counterpart in the dictionary and therefore do not affect the pattern match. This assumption is evaluated in this study. Controlled motion was added to phantom and in vivo MRF experiments, and the results were related to realistic patient movement recorded by a 3D camera system.
Purpose
Magnetic Resonance Fingerprinting (MRF)1 is a new technique that yields multi-parametric, quantitative MRI. Despite the vast number of parameters affecting the MR signal, signal simulations are limited to incorporating only impacting parameters. In MRF, it is assumed that signals corrupted by motion do not significantly affect the pattern match, since the corrupted signal parts do not have a counterpart in the dictionary. Therefore, motion is typically ignored in signal simulations to build the dictionary1.
Motion in slice-selective sequences can be categorized in in-plane and through-plane motion. In-plane motion is supposed to lead to only small changes in the actual spin evolution, because the measured signal in one voxel can be corrected for by registering the images2. With through-plane motion, not only the sampling locations are changed but also the spin evolution itself, because out-of-slice spins that have not been excited before move into the slice where they get excited and contribute to the measured signal.
In this study, the tolerance of slice-selective FISP-MRF3 against motion is evaluated.
Methods
We use a prototype implementation of the MRF method3 that is based on a steady-state free-precession (SSFP) sequence with a prescan4-based B1+ correction. A spiral sampling scheme is applied (undersampling factor 48, field of view 300 mm, resolution 1.2 mm, slice thickness: 5mm) with a spiral angle increment of 82.5° from shot to shot5,6.
Measurements were performed on a phantom (EuroSpin “Test Object T05", Sonar Diagnostics Ltd, Livingston/UK) consisting of several cylindrical vials and on a healthy volunteer on a clinical 3T MR scanner (MAGNETOM Skyra, Siemens Healthcare, Erlangen, Germany). To control the motion in a simple, precise and reproducible manner, we kept the imaged object still and instead varied the z-position of the measured slice during the acquisition by a predefined pattern. The healthy volunteer’s head was fixated firmly. The movement patterns were designed to resemble breathing (continuous movement throughout the scan with different amplitudes and frequencies) as well as short, isolated motion events (modelled as a half-sine with 0.5 Hz frequency with different amplitudes and at different times during the acquisition). The resulting T1 and T2 maps were compared to the corresponding ones without movement.
Additionally, MRI scans with less fixation and a camera system (Kineticor, HI, USA) were performed. The volunteer was asked to perform several movements during the scan, and the resulting movement patterns were related to the artificial motion experiments.
Results
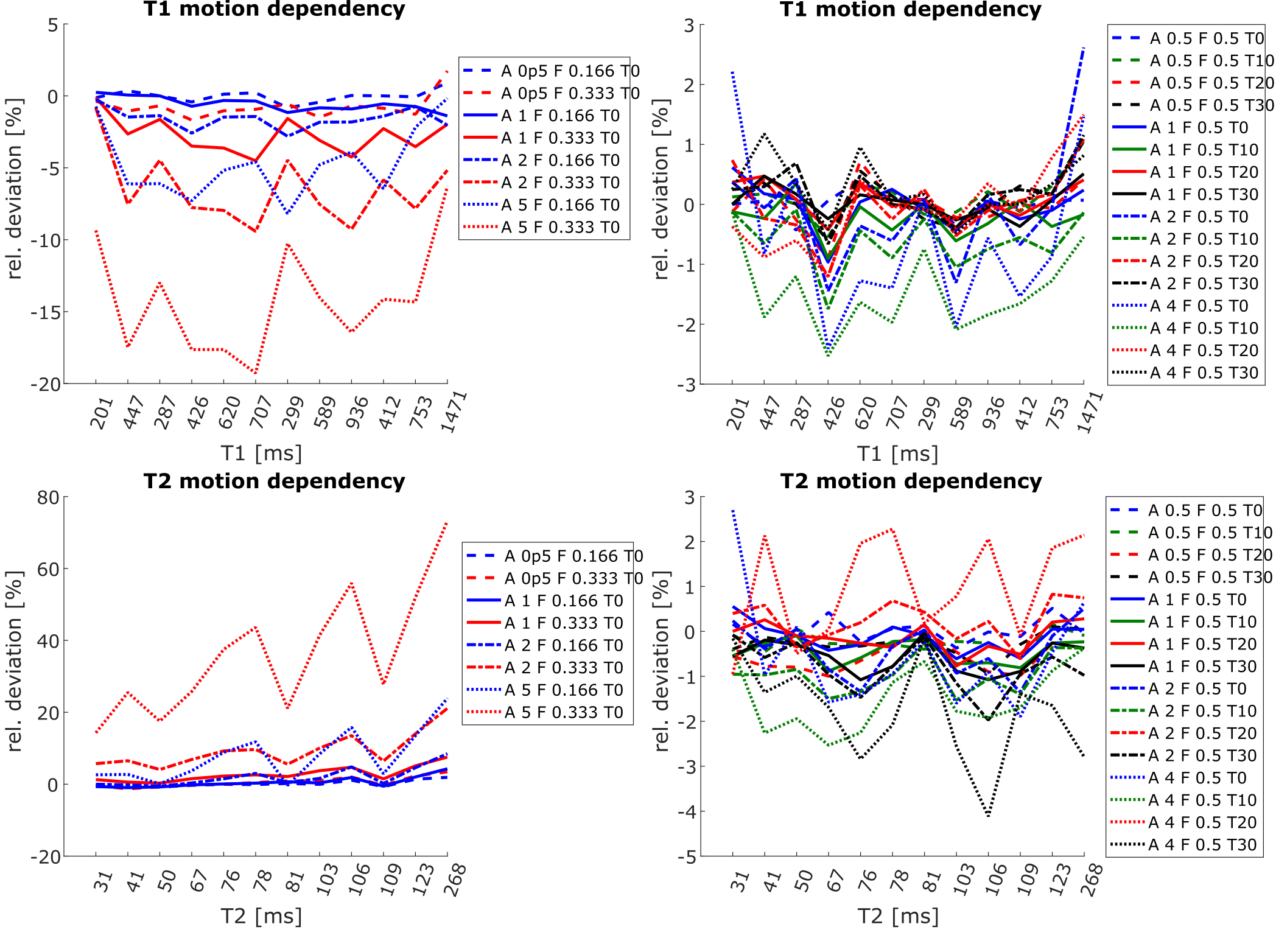
Figure 1 displays the relative deviation of T1 and T2 results from MRF experiments with artificial through plane motion against an experiment without additional motion in the agarose-filled phantom. A trend to higher deviations of T1/T2 with increased frequency and amplitude of artificial breathing motion can be observed. No trend or deviations higher than 4 percent were observed with isolated short movements.
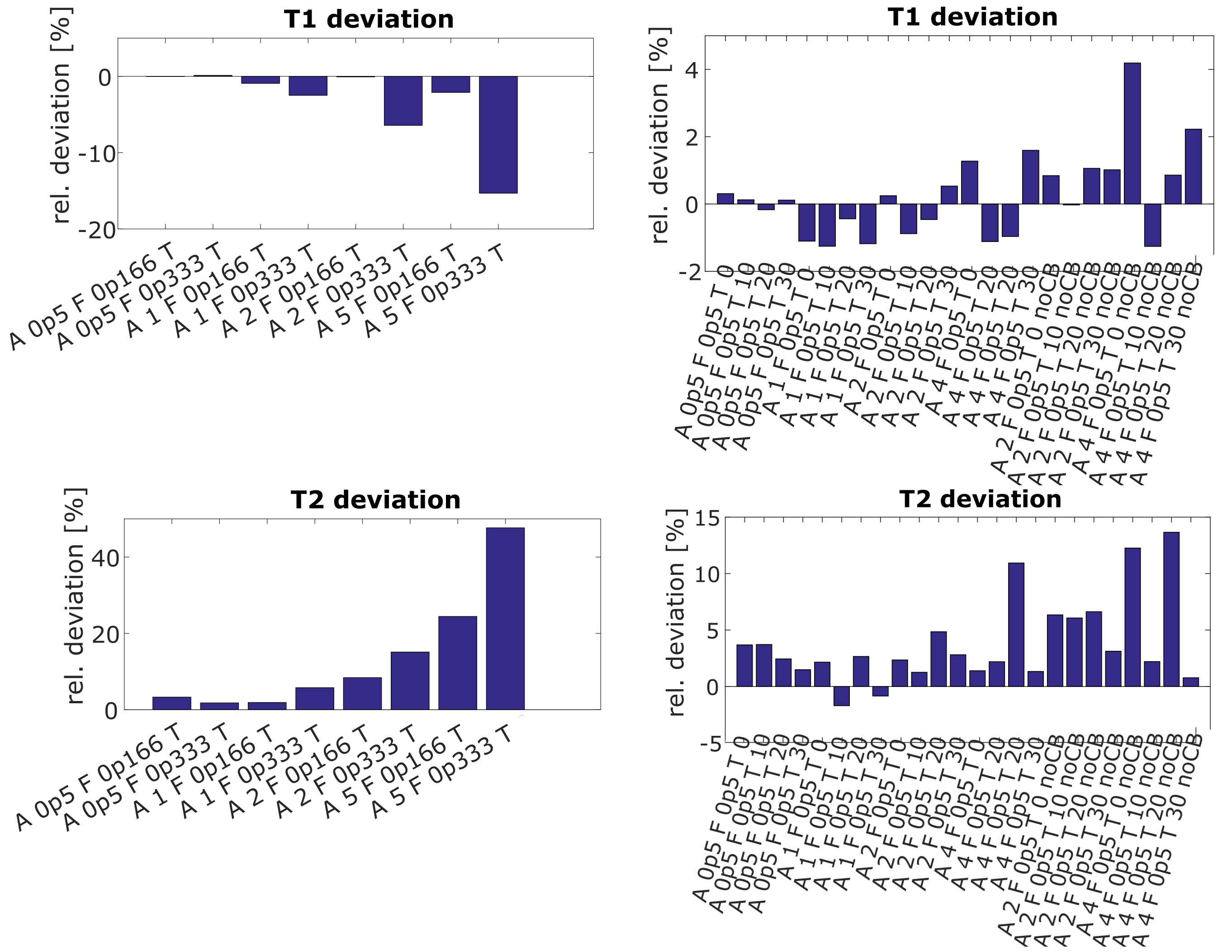
Figure 2 displays corresponding results in the human brain. The respective parameter value was calculated in homogenous white matter regions of the brain. Experiments in the brain were also carried out with strong short movements where the slice does not come back to its original position. Results for artificial breathing motion in the brain show the same behavior as those in the phantom. Short isolated movements lead to deviations in T2 of up to 15%.
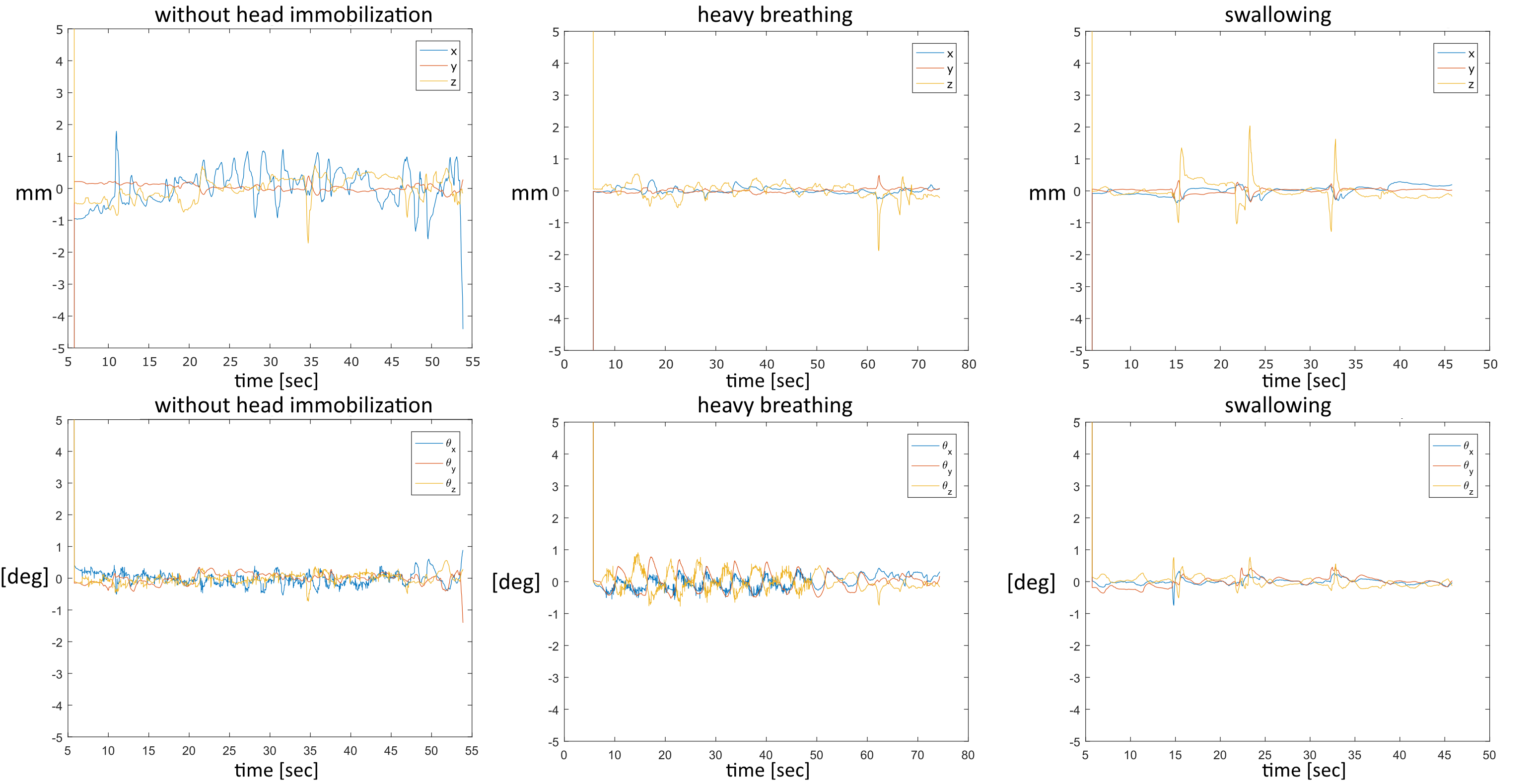
Figure 3 shows actual motion that was recorded with the help of the camera system. Both the translation and rotation around three angles (in xyz convention) are depicted. Respiration introduces dominantly head foot motion, i,e. motion that is in thru-plane direction for the typical transverse MRF acquisitions.
Discussion
As expected, through-plane movement with periods higher than TR can have a strong impact on MRF results. The impact is higher for recurrent motion such as breathing. In this study, we found a high deviation when introducing heavy and rapid breathing. The impact of short strong movements depends on the time point when it occurs and its amplitude. In both cases, T2 is more afflicted than T1. Another finding that should be noted is that through-plane motion yields blurred maps.
However, real volunteer motion as recorded in this study is smaller than what is needed to significantly alter MRF results. Due to the complexity of motion in real patients, further investigations are required. Finally, the camera system may be used to directly correct for patient motion in real-time by feeding its signal back to the scanner, which is subject of ongoing work.
Conclusion
We evaluated the motion sensitivity of slice-selective FISP-MRF by adding a certain spectrum of controlled motion to the experiment. A certain spectrum of motion types and its impact on MRF could be evaluated.
Real volunteer movements quantified with a 3D camera system are within this spectrum in this study.
Acknowledgements
No acknowledgement found.References
1 Ma D. et al, Magnetic resonance fingerprinting. Nature 2013;
2 Mehta B. et al, Motion Insensitive Magnetic Resonance Fingerprinting (MORF), ISMRM Workshop on Magnetic Resonance Fingerprinting 2017;
3 Jiang Y. et al, MR fingerprinting using fast imaging with steady state precession (FISP) with spiral readout. MRM 2015;
4 Chung S. et al., Rapid B1+ mapping using a preconditioning RF pulse with TurboFLASH readout, MRM 2010;
5 Pfeuffer, J. et al, Mitigation of Spiral Undersampling Artifacts in Magnetic Resonance Fingerprinting (MRF) by Adapted Interleaf Reordering. ISMRM 2017;
6 Körzdörfer, G. et al, Spatial biases in Magnetic Resonance Fingerprinting parameter maps arising from undersampling patterns. ISMRM 2017;
Figures