2861
Integration of the BART Toolbox into Gadgetron Streaming Framework for Inline Cloud-Based Reconstruction1NHLBI, National Institutes of Health, Bethesda, MD, United States
Synopsis
BART toolbox is a free open-source framework that consists of a rich set of libraries for common operations in medical image reconstruction. Although the libraries provide highly efficient image reconstruction algorithms and toolbox of command-line programs, it does not, by itself, provide seamless integration with commercial MRI systems. Therefore, the goal of the present work is to enable the deployment of BART in clinical research environment for real-time image reconstruction using Gadgetron streaming framework.
Introduction:
BART1 is an open-source reconstruction toolbox implementing linear and non-linear MRI reconstruction algorithms. This toolbox is used as a command line tool with custom intermediate file format. While the command line interface is well suited for exploring algorithms and reconstruction parameters, it does not, by itself, provide seamless integration with clinical MRI systems. In addition, the computationally intensive (iterative) reconstruction can be prohibitive for clinical usage. We have leveraged the Gadgetron2 streaming framework to provide tight, seamless scanner integration of BART on Siemens MRI systems. The integration of BART into the Gadgetron also enables users to leverage cloud computing resources and achieve fast online reconstruction relevant to clinical workflow.Methods:
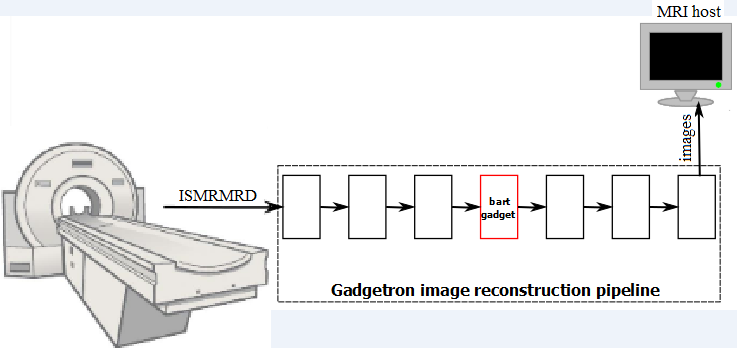
The Gadgetron was extended with a new reconstruction module, the “bartgadget” which was implemented in C++ and designed to be inserted into a Gadgetron reconstruction chain after individual readouts (ISMRMRD3 Acquisitions) have been accumulated into reconstruction buffers. The reconstruction buffers, including any parallel imaging reference data, are written to disk to allow BART command line processing. The BART commands are supplied by user as a Bash script. After the shell script execution, the resulting images are read back into the Gadgetron streaming pipeline and passed down the chain for any additional processing before being returned to the scanner. The use of a configurable BART shell script allows deployment of many different BART reconstructions and for these reconstructions to be selected from the Gadgetron client, which can either be a command line client or the MRI scanner itself. The Gadgetron includes infrastructures to support cloud computing4, which were utilized to accelerate BART reconstructions. The BART integration Gadgets are available as part of the Gadgetron source code archive (https://github.com/gadgetron/gadgetron/tree/master/gadgets/bart) from commit “ 06d2892” and onwards.
Experiments: Multi-slice real-time cardiac cine imaging was chosen as an example application. Following imaging parameters were used: TR/TE=3.85/1.75ms, FA=50o, FOV=360×270mm2, 10 SAX slices, slice thickness=8mm, GRAPPA rate 3, matrix size=160×120, acquisition duration = 1200ms/slice. The images were reconstructed using the following four reconstruction configurations 1) Gadgetron-BART reconstruction using ESPIRIT5 with L1 regularization on single computing nodes, 2) Gadgetron reconstruction using TGRAPPA6 on single computing nodes, 3) Gadgetron-BART cloud reconstruction using ESPIRIT with L1 regularization on 12 computing nodes, 4) Gadgetron cloud reconstruction using TGRAPPA on 12 computing nodes. All computational nodes were deployed on the Microsoft Azure cloud platform. The instance type used was Standard_F16 (16 cores, 32GB RAM).
Results:
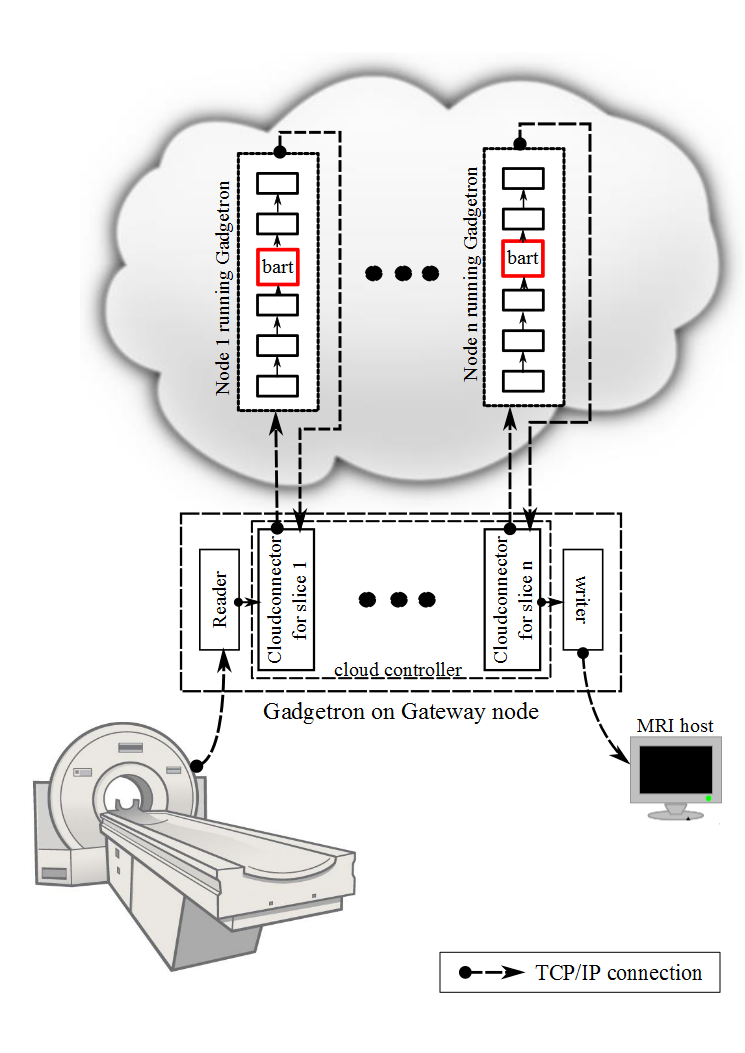
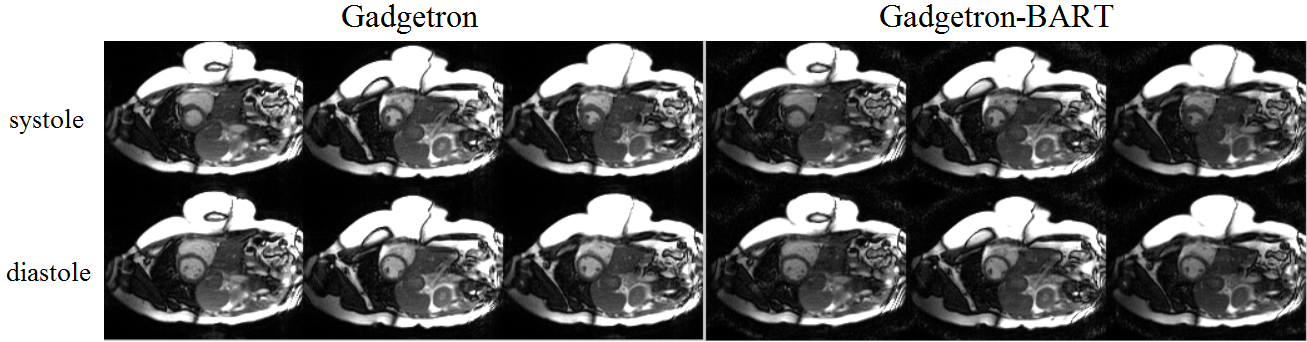
Figure 1 shows a schematic diagram of the integration of BART gadget into Gadgetron reconstruction pipeline and inline display of images on the MRI host. Figure 2 illustrates the deployment of BART on the cloud using Gadgetron-based cloud computing. In our experiments, each node on the cloud or on the distributed two nodes system was running an identical Gadgetron reconstruction pipeline and, the images were reconstructed one slice per node. Images reconstructed on the remote computers using the BART toolbox were successfully return to the MRI host for display and inclusion in the Dicom database. Table 1 shows the total image reconstruction time of the different reconstruction configurations. Figure 3 displays side-by-side three slices of the real-time cine cardiac images using the Gadgetron reconstruction and the Gadgetron-BART reconstruction respectively.Conclusion:
Our study demonstrates the inline integration of BART into the Gadgetron framework to accelerate real-time cine imaging. The use of a configurable BART script allows quick prototyping and the deployment of many different BART reconstructions that can be integrated into Gadgetron reconstruction from the command line or deployed on the MRI scanner itself. The new BART gadget is designed to be thread safe and fully deployable on distributed systems. Since Gadgetron and BART frameworks are completely decoupled, the new gadget can be easily modified to accommodate other imaging reconstruction frameworks regardless of the programming language used in these frameworks.Acknowledgements
Funding source: NHLBI Division of Intramural Research ZIA-HL006214References
1Uecker et al. Berkeley Advanced Reconstruction Toolbox, Annual Meeting ISMRM, Toronto 2015, In Proc. Intl. Soc. Mag. Reson. Med. 23:2486
2Hansen et al. Gadgetron: An Open Source Framework for Medical Image Reconstruction. Mag. Reson Med 69:1768-1776(2013)
3Inati et al. ISMRM Raw Data Format: A Proposed Standard for MRI Raw Datasets. Mag. Reson. Med 77:411-421(2017)
4Xue et al. Distributed MRI Reconstruction Using Gadgetron-Based Cloud Computing. Mag. Reson. Med. 73:1015-1025(2015)
5Uecker et al. ESPIRIT-an eigenvalue approach to autocalibrating parallel MRI: where SENSE meets GRAPPA. Mag. Reson. Med. 71:990-1001(2014)
6Breuer et al. Dynamic autocalibrated parallel imaging using temporal GRAPPA (TGRAPPA). Mag. Reson. Med 6:981-985(2005)
Figures