2852
A fully automatic territory segmentation method for prostate MR images by multi-atlas matching1Biomechanics and Medical Engineering, Academy for Advanced Interdisciplinary Studies, Peking University, Beijing, China, 2Department of Radiology, Peking University Frist Hospital, Beijing, China, 3Biomechanics and Medical Engineering, Academy for Advanced Interdisciplinary Studies/ College of Engineering, Peking University, Beijing, China
Synopsis
Approximately 70%-75% of prostate cancers originate in the peripheral zone (PZ) and 20%-30% in the transition zone (TZ). According to the Prostate Imaging Reporting and Data System (PIRADS), the diagnostic criteria for PZ and TZ is different. To accomplish fully automatic segmentation for the PZ and TZ, we proposed a territory segmentation method for prostate MR images by multi-atlas matching. This novel segmentation method could not only segment the whole prostate (WP) region, but also the PZ and TZ. The proposed method is fully automatic and could achieve high segmentation accuracy.
Purpose
Prostate cancer (PCa) is the fourth most common cancer and the second most common cancer in men worldwide [1]. Approximately 70%-75% of prostate cancers originate in the peripheral zone (PZ) and 20%-30% in the transition zone (TZ) [2]. According to the Prostate Imaging Reporting and Data System (PIRADS), the diagnostic criteria for PZ and TZ is different [2]. To accomplish fully automatic segmentation for the PZ and TZ and improve prostate cancer computer aided diagnosis, we proposed a territory segmentation method for prostate MR images by multi-atlas matching. This novel fully automatic segmentation method could not only segment the whole prostate (WP) region, but also the PZ and TZ with high segmentation accuracy.Materials & Methods
Data source
The proposed method is evaluated on 80 clinical scans from prostate cancer patients. All MR images of the prostate cancer were acquired on a 3.0-T whole-body MR scanner (Achieva, Philips Medical Systems, Best, the Netherlands) with an abdomen coil. All routine prostate MR examinations followed standardized protocols. To determine the ground truth, each scan was manually segmented by two human experts, including WP, PZ and TZ.
Atlas selection
The selection is based on the similarity of the target image and the deformed atlas images [3]. The normalized mutual information (NMI) is measured to evaluate the similarity.
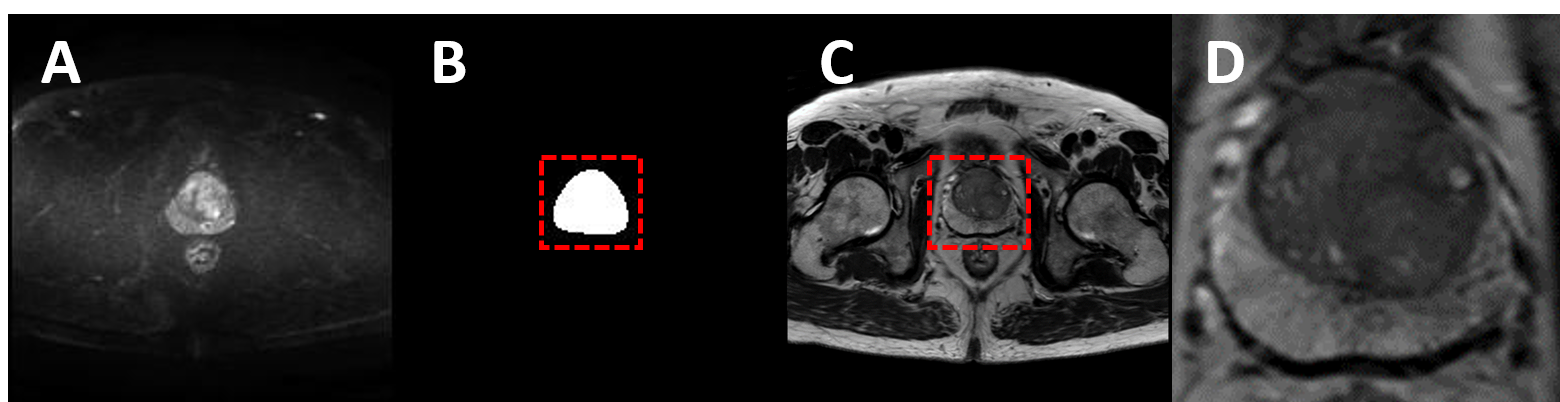
Prostate detection
To locate the prostate and obtain the prostate volume for the next steps, an average filter was used to denoise in the images of DWI and then K-means algorithm was adopted for DWI gray value, extracting the bounding box of prostate dilated mask for cropping the prostate volume for the multi-atlas matching stage (Fig. 1).
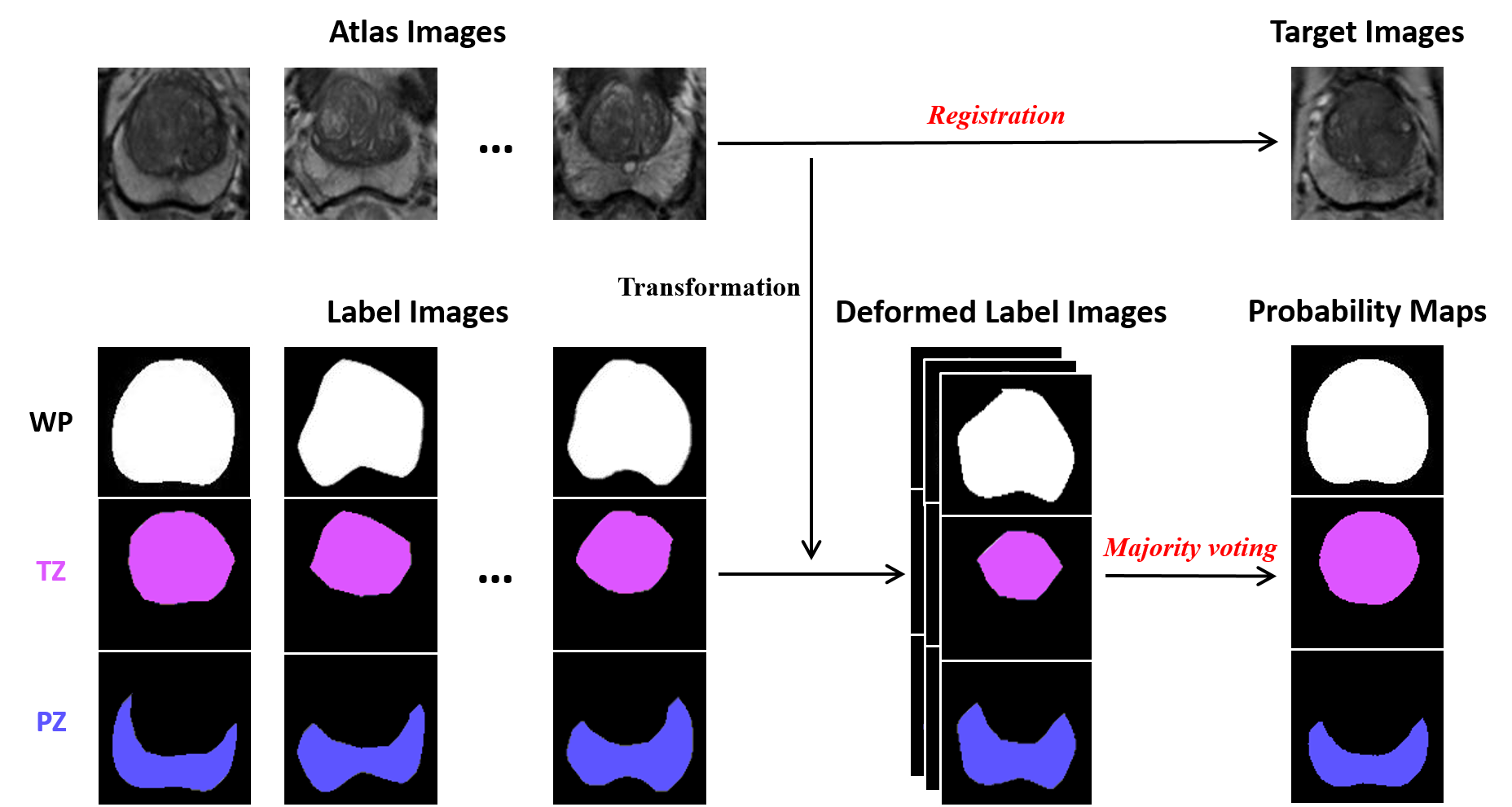
Multi-atlas Matching
(A) Registration
In the registration stage, each atlas image Ai is matched to the target image Ti. An coordinate transformation TMi is obtained from registering the atlases image Ai to the target image Ti. The similarity measure is localized mutual information (LMI) (Fig. 2).
(B) Majority voting
The registration stage yields a set of transformations TMi, which can be applied to the label images Li, resulting in a set of deformed label images LDi. To combine the deformed segmentations of the selected atlas images into a single segmentation L(t), a weighted voting rule step is considered [4].
Results
The Dice similarity coefficient, over-segmentation ratio and less-segmentation ratio were evaluated between the manual segmentations and the automatic segmentations (Table. 1). More than 80% Dice similarity coefficient can be obtained and the over-segmentation and less-segmentation ratio is less than 16% for WP, PZ and TZ, indicating that the proposed method achieved high segmentation accuracy for prostate territory segmentation. Fig. 3 shows typical results of segmentation outlined by the computer and the experts, for WP, PZ and TZ.Conclusion
The proposed method could segment the prostate territory with high accuracy and can be applicated in prostate cancer computer aided diagnosis system.Acknowledgements
No acknowledgement found.References
[1] Ferlay J, et al. International journal of cancer 2015, 136(5): E359-E386.
[2] Weinreb J C, et al. European urology, 2016, 69(1): 16-40.
[3] Rohlfing T, et al. NeuroImage, 2004, 21(4): 1428-1442.
[4] Klein S, et al. Medical physics, 2008, 35(4): 1407-1417.
Figures