2699
Data driven sampling of k-space using GO-Active techniquePavan poojar1,2, Ashok kumar reddy2, Amaresha Shridhar Konar1, Ramesh Venkatesan2, and Sairam Geethanath1,3
1Medical Imaging Research Centre, Dayananda Sagar Institutions, Bangalore, India, 2GE, Healthcare, Bangalore, India, 3Dept. of Radiology, Columbia University Medical Center, New York, NY, United States
Synopsis
The extensive coverage of k-space data on a standard MRI scanner requires long acquisition times. In dynamic MRI methods such as DCE-MRI, cardiac MRI, DWI, etc., the shape of the significant values in k-space depends on the structure of the organ and temporal events. The proposed method generates the arbitrary k-space trajectory and optimizes the gradient waveforms by utilizing GO-Active. Design constraints of gradient system are slew rate and gradient amplitude are accounted for by using convex optimization. All images were acquired on a GE 1.5T scanner. Image reconstruction was performed in graphical programming interface.
Purpose
The shape of the object being imaged in MRI impacts the locations of significant values of k-space and are arbitrary. This can be generally observed in dynamic scans such as DCE-MRI, cardiac MRI, etc. The conventional trajectories such as radial, spiral and Cartesian are less efficient in covering the arbitrary k-space trajectories. Data driven k-space trajectory may therefore provide optimal sampling strategies to enable significantly high spatio-temporal resolutions in dynamic scans. Gradient Optimization using Active contours (GO-Active) technique1 can be extended to obtain arbitrary k-space trajectory and optimized gradient waveforms based on the hardware constraints.Methods
The k-space data was acquired on the GE 1.5 T scanner for geometric shapes and that of a heart. 2D Gradient Recalled Echo (GRE) sequence was used with the parameters – TR/TE – 20/10 ms, flip angle – 60o matrix size – 128x128, field of view – 25.6 cm, number of slices – 1. The circular mask (1’s outside the circle and 0’s inside the circle) was created. The resulting k-space was obtained by multiplying the mask with the original k-space. The mean () and standard deviation () values were calculated. The k-space values greater than ( + 2*) were considered as the significant values. This kspace region acted as a threshold mask upon which morphological operations were performed to smoothen the mask. This aided the active contour perform better. The active contour2 segmentation method was applied to this mask to obtain k-space trajectory points. These trajectory points were divided into multi-shot trajectories and subsampled to obtain required number of points per shot. The number of shots and number of points per shot was selected based on the application. Each shot was fed to the convex optimization tool (cvx)3, that was utilized to optimize the gradient waveforms based on the hardware constraints such as maximum gradient amplitude (Gmax) – 33 mT/m and maximum slew rate (SRmax) – 100 T/m/s. The obtained gradient waveforms were verified using analytical method. Multi-shot trajectories along with the image were passed to Graphical Programming Interface (GPI) to reconstruct the images. The same method was repeated for the other shapes and heart.Results
Figure 1 shows the phantom images which has different shapes and along with their respective k-spaces. Figure 2 depicts the different shapes of ROI drawn on the cardiac data and k-spaces are obtained. It can be absorbed from both the figures that the significant values in kspace are dependent on the shape of the object. The block diagram depicts the complete overview of the data driven GO-Active method shown in figure 3. Figure 4 shows the retrospective reconstruction of data driven GO-Active for the ROI heart and two shapes. The reconstruction was performed in GPI for 8 shot trajectories. It can be observed that the trajectories selected were based on the shape of the organ which is typically arbitrary. Figure 5 shows the GPI network for retrospective reconstruction.Discussion and Conclusion
The k-spaces shown in figure 1 indicate that the significant values in k-space is dependent on shape of the object. GO-Active can be used for arbitrary k-space trajectory as it samples the k-space based on the required shape. This method works efficiently as compared to conventional trajectories. The gradient waveforms were designed and optimized utilizing cvx based on hardware constraints Gmax and SRmax. Additional constraints such as the Peripheral Nerve Simulation (PNS), gradient amplifier current and voltage limit, etc. can be included as constraints in cvx. Current and future work involves prospective implementation of GO-Active using Pulseq-GPI.Acknowledgements
No acknowledgement found.References
[1] Pavan Poojar et.al., Gradient Optimization for arbitrary k-space trajectories using Active Contour (GO-Active) ISMRM-2016. [2] Michael Kass et.al., “Snakes: Active Contour Models”, International Journal of Computer Vision, 1988 [3] Micheal Grant and Stephen Boyd, “Disciplined convex programming”, 2014Figures

Figure 1: Images with different shapes and their
respective k-spaces.

Figure 2: images with their respective kspaces for different ROI on heart image.
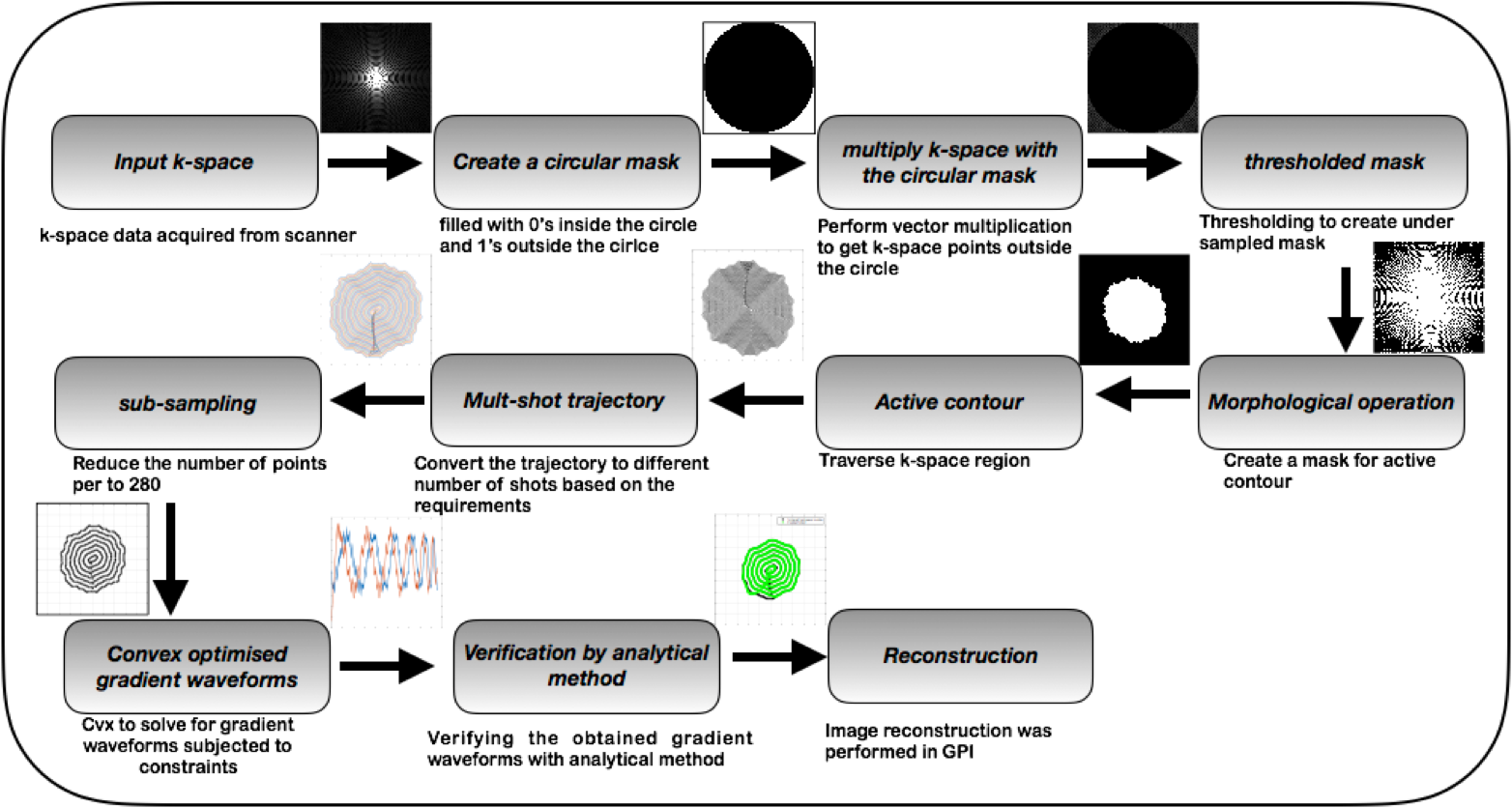
Figure 3:Flow diagram depicted the step-by-step procedure of the data driven GO-Active method.
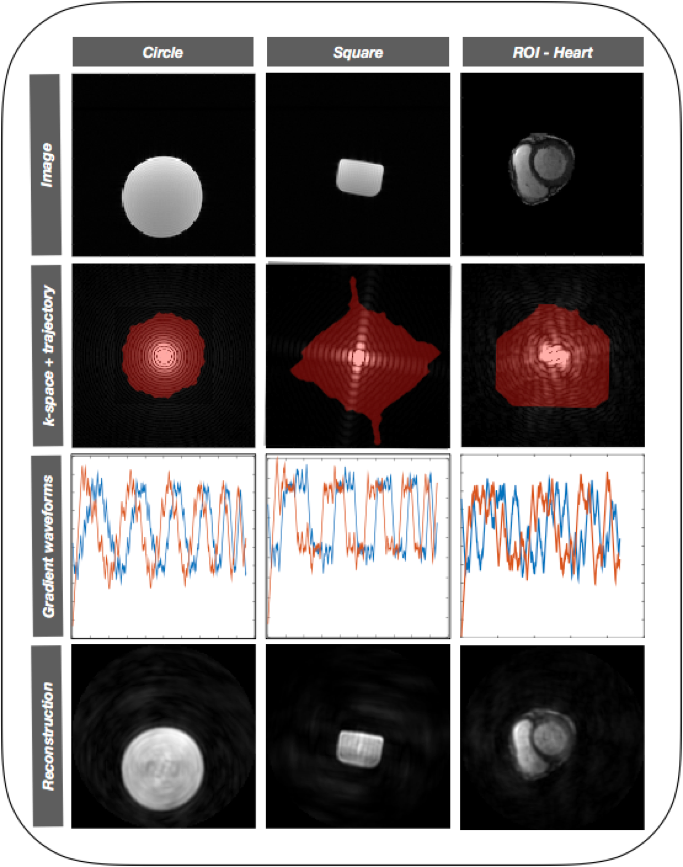
Figure 4: Retrospective reconstruction
of different shapes along with gradient waveforms
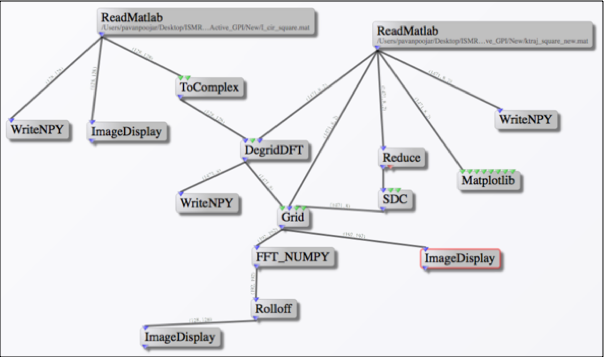
Figure 5: GPI network
for retrospective reconstruction of different shapes