2653
A Novel Framework for Head Motion Measurement using Free Induction Decay Navigators from Multi-Channel Coil Arrays1Radiology, Boston Children's Hospital, Harvard Medical School, Boston, MA, United States
Synopsis
FID navigators (FIDnavs) encode substantial quantitative rigid-body motion information; however, current implementations require subjects to cooperate for a choreographed training session, which is impractical in many clinical scenarios. We present a new approach that uses simulation of the acquisition physics and effect of motion on the measured FIDnav from each coil. This method is tested in three volunteers scanned at 3T with a 32-channel head coil using a 3D FLASH sequence, each performing a series of repeating motion patterns. Sub-millimeter and sub-degree tracking accuracy was achieved across all volunteers, demonstrating the efficacy of this approach for real-time head motion measurement.
Introduction
Free induction decay navigators (FIDnavs) can qualitatively detect motion in MRI due to the localized sensitivity profiles of each coil1 and have been shown to recognize previous head positions within the magnet using a pattern recognition approach2. Obtaining quantitative motion information from FIDnavs currently requires subjects to perform a series of choreographed motions with simultaneous ground-truth motion measurements to train the algorithm, which is highly impractical for imaging uncooperative patient groups who are prone to motion. This work presents a novel motion measurement framework that eliminates the need for patient-specific training by calibrating FIDnav signal changes using a model of the spatial coil sensitivity profiles (CSP) and simulation of the effect of head motion upon the FIDnav measurements from each coil.Methods
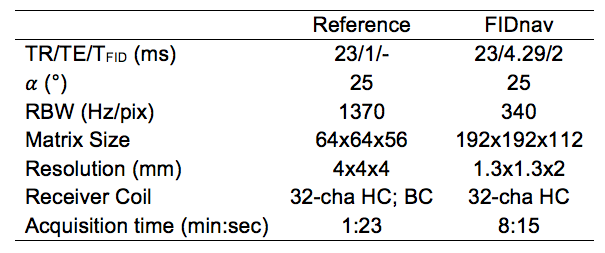
Data Acquisition. Three volunteers were scanned at 3T (Siemens Healthcare, Erlangen, Germany), using a product 32-channel head coil array, after providing written informed consent. A 3D FLASH sequence was modified to include an FIDnav readout (2 ms duration) every TR, after the non-selective RF excitation pulse. Two FID-navigated sagittal, non-selective 3D FLASH scans with fat saturation were acquired for each subject. During both scans, verbal instructions were given to subjects to perform a repeating series of motion patterns: head nodding, shaking, figure-of-eight motion and translation along the scanner bore. Motion blocks of 20 s were interleaved with 20 s of no motion. For comparison, rigid-body motion estimates were acquired every TR by an electromagnetic tracking system (Robin Medical, Baltimore, MD), comprising two sensors placed on the subject's forehead. Low-resolution reference scans were also obtained using both surface and body coils for calculation of the CSP and estimation of the initial effective proton distribution and noise covariance matrix (α=0°). Acquisition parameters for each scan are displayed in Table 1.
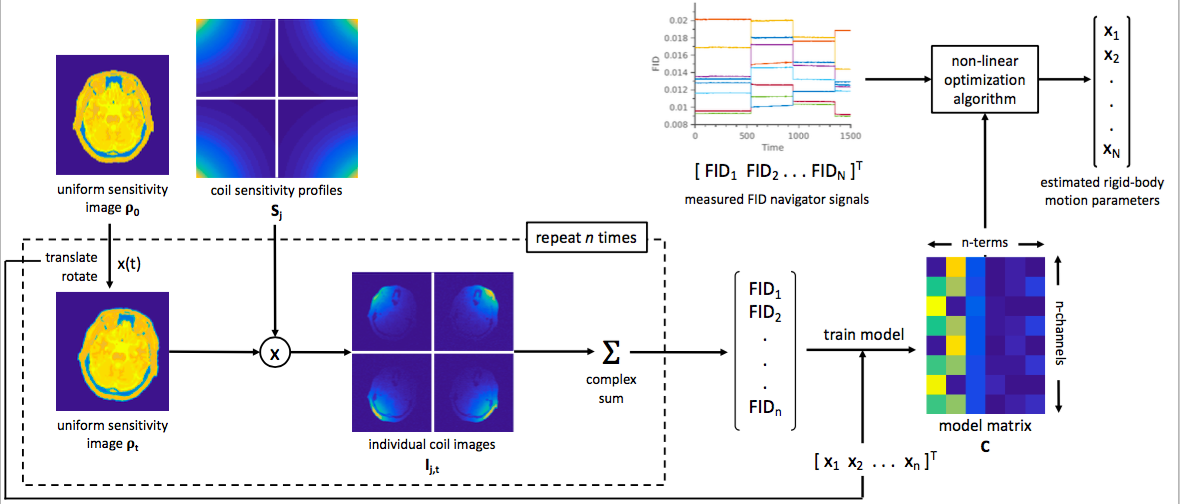
Data Analysis. CSPs were computed from the ratio of complex surface and body coil images and modelled across the whole field of view by fitting a 3D linear radial basis function to reliable measured data points. The reference image was transformed and resampled 500 times within this model of the coil array and FID signals were generated for each new position as the complex sum of simulated coil images (Fig. 1). These were used to construct a second-order polynomial regression model (C) of FIDnav signal changes with motion. (Previous phantom validation experiments demonstrated that a linear model is insufficient to accurately model large-amplitude motions.) The measured FIDnavs were low-pass filtered to mitigate physiological noise and an efficient numerical non-linear algorithm (BOBYQA3) was used to solve the following optimization problem:
$$\min_{x_t,k_t} \{(|y_t|-k_t|Cf(x_t)|)\psi^{-1}(|y_t|-k_t|Cf(x_t)|)\}$$
where yt is a vector of the measured FIDnavs at time t, xt is a vector of the unknown rigid-body motion parameters, Ψ is the noise covariance matrix and kt is a scaling factor included to account for bulk magnitude fluctuations. Accuracy and precision of FIDnav motion estimates were computed as the mean and standard deviation of the error, relative to EM tracker motion measurements.
Results
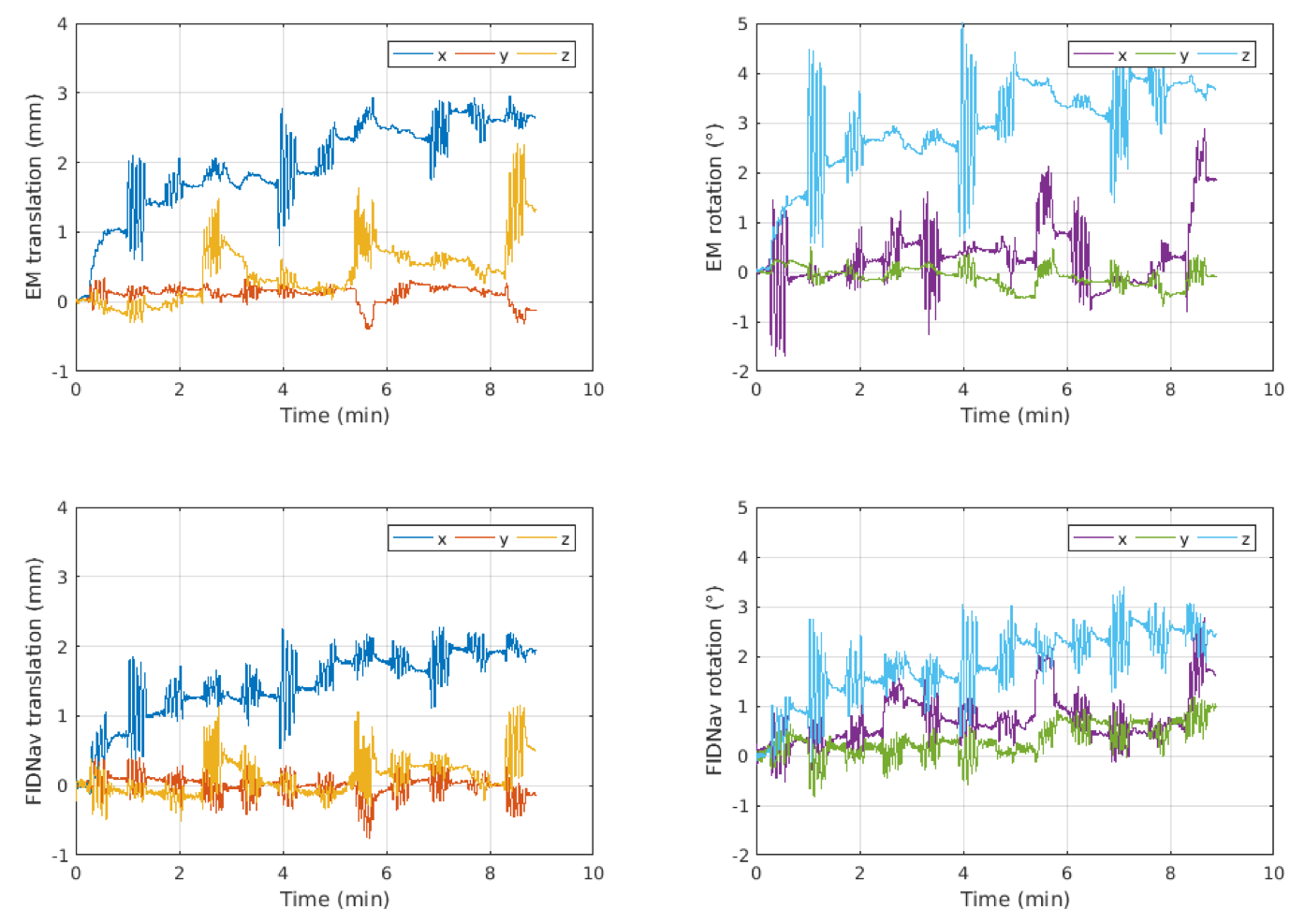
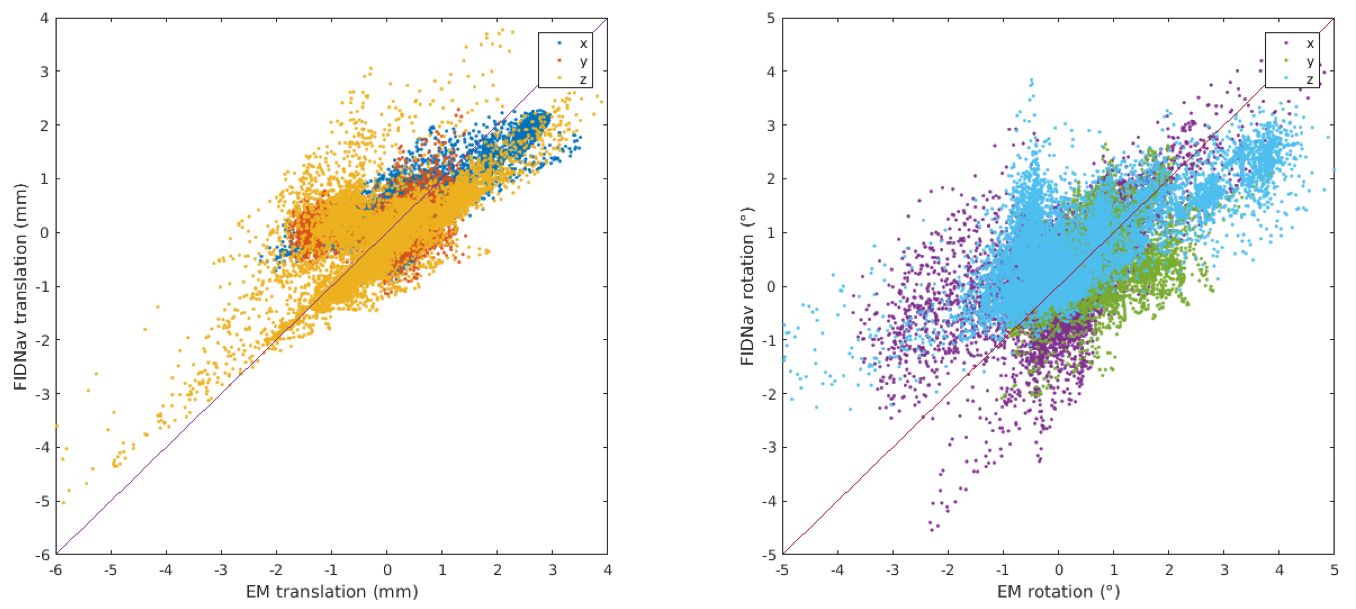
The motion trajectories from one volunteer scan as measured by the EM tracking system and predicted by the proposed FIDnav motion measurement system are shown in Figure 2. Comparing translational and rotational motion estimates across all volunteers and scans demonstrated the FIDnav motion measurement system had an accuracy and precision of 0.40±0.40 mm and 0.58±0.52° for maximum RMS motion amplitudes of 3.7 mm and 3.6° (Fig. 3). 94% and 90% of data points had mean translational and rotational errors <1 mm and <1° respectively.Discussion
This study demonstrates the ability of FIDnavs to provide quantitative motion estimates, without the need for choreographed training or additional ground-truth motion measurements. By calibrating the algorithm with simulated training data using a model of the head coil array, head translation and rotation could be predicted with sub-millimeter and sub-degree accuracy and precision. Residual errors are likely due to asymmetry in the underlying coil geometry, B0 field variations and changes in coil loading that occur with motion that would affect the accuracy of the model, as well as any errors in the EM tracking measurements e.g. due to non-rigid motion. FIDnavs can be acquired with high temporal resolution and minimal impact on contrast, making this an extremely practical approach for intrinsic correction of rapid head motion. FIDnavs could be used for standalone retrospective correction or to guide autofocusing algorithms for improved accuracy and computational speed. Future studies will test correction of individual k-space shots with FIDnav motion estimates and work towards real-time prospective implementation of this approach.Acknowledgements
This research was supported in part by the following grants: NIH-5R01EB019483, NIH-4R01NS079788 and NIH-R44MH086984.References
1. Kober T Marques JP, Gruetter R, and Krueger G, Head motion detection using FID navigators, Magn Reson Med. 2011;66:135–143.
2. Babayeva M, Kober T, Knowles B, et al., Accuracy and precision of head motion information in multi-channel free induction decay navigators for magnetic resonance imaging, IEEE Trans Med Imaging, 2015;34(9):1879–1889.
3. Powell MJD, The BOBYQA algorithm for bound constrained optimization without derivatives, 2009; Cambridge, UK.
Figures