2649
Prospectively Motion Corrected DWI by Projection Fat Navigators1Department of Clinical Neuroscience, Karolinska Institutet, Stockholm, Sweden, 2Neuroradiology, Karolinska University Hospital, Stockholm, Sweden, 3GE Healthcare, Stockholm, Sweden
Synopsis
A projected fat navigator module was added to a diffusion weighted EPI sequence to allow prospective rigid body motion correction without additional hardware. Improved image quality was demonstrated by imaging the brain of a volunteer subject who performed prescribed patterns of large motion with and without prospective correction. Improvements were most evident for through-plane motion. For in-plane motion only, the image quality was comparable to images acquired without motion. Ghosting due to gradient delays following FOV updates was avoided by acquiring phase reference lines directly after the excitation pulse.
Purpose
Due to the short duration of EPI readout trains, echo planar images are quite insensitive to motion within readouts. In typical applications however, multiple shots and/or volumes are combined, rendering these applications sensitive to motion between shots, slices, and volumes. In-plane motion can be compensated by retrospective correction, but through-plane motion is more challenging. Prospective correction of diffusion weighted EPI has been performed using a camera system (1). Here, we propose to use projection fat navigators, FatNav (2), aiming to reduce the sensitivity of DWI to all kinds of motion without additional hardware.Methods
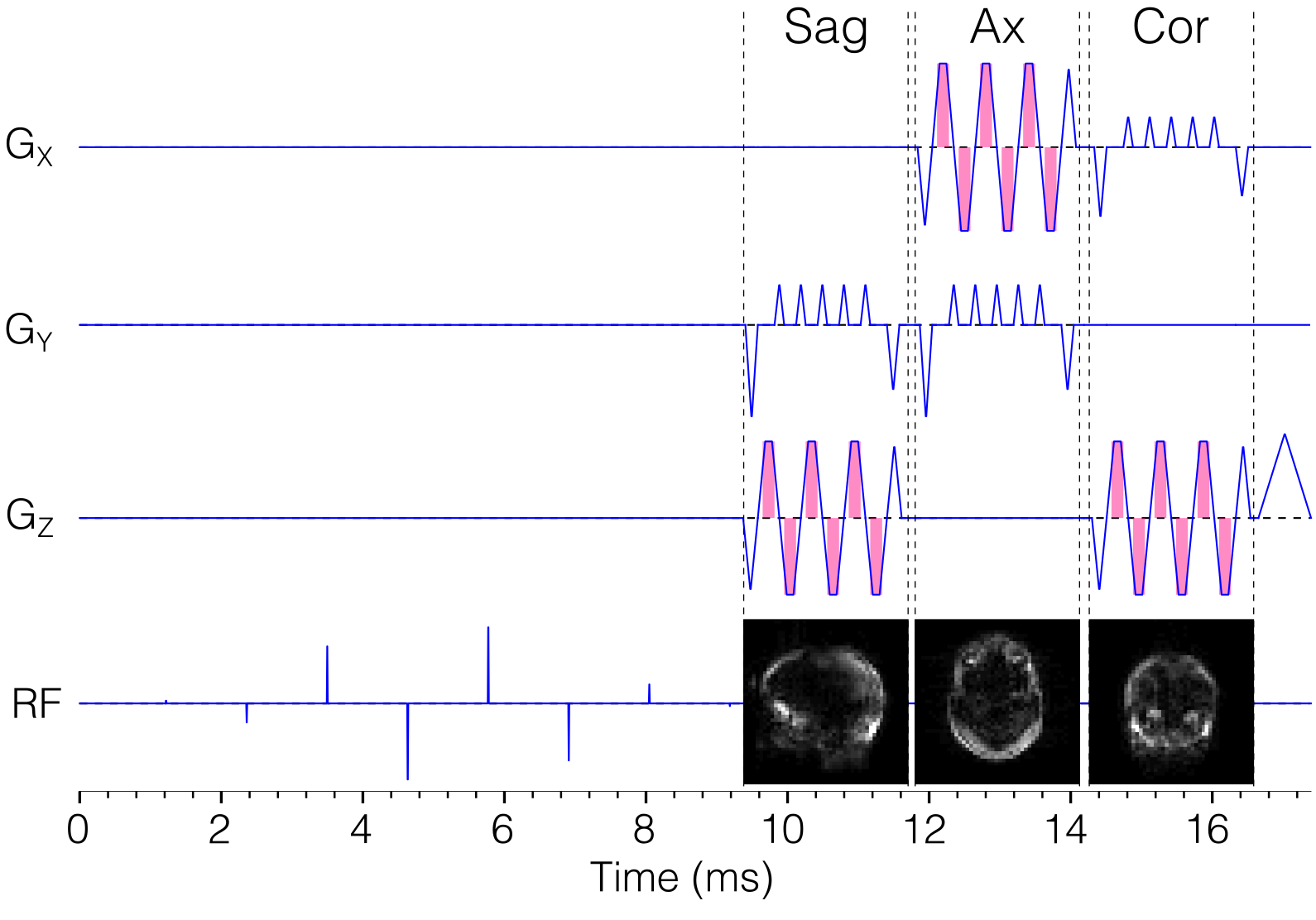
An EPI sequence developed in-house (3) was modified by inserting a rapid fat navigator module (4) before each EPI readout (Fig 1), and additional phase reference lines directly after the excitation pulse for ghost correction (Fig 2). The navigator module acquires three orthogonal projections, which are heavily accelerated to minimize the duration (17 ms) and distortions. At the beginning of the sequence, three fully sampled multi-shot 3D calibration volumes were acquired, to allow registration of the navigators to projections of the calibration volumes in order to estimate the motion and update the FOV.
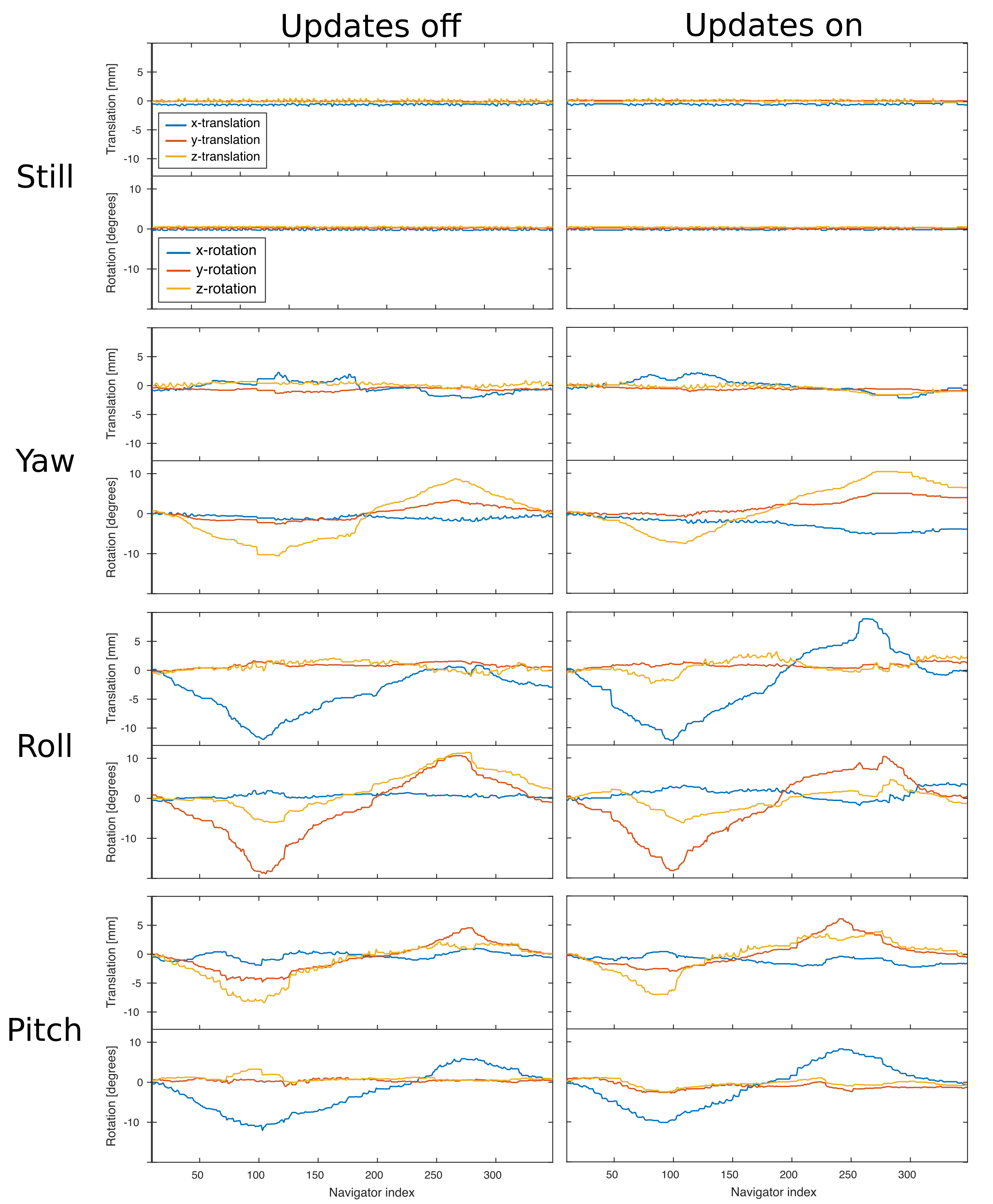
A volunteer was imaged on a 3T GE DVMR750 clinical system using a standard eight-channel head coil. Four different motion patterns were repeated with and without FOV updates, denoted “still”, “yaw”, “roll”, and “pitch”. These eight series were then reconstructed with and without retrospective motion correction. Acquisition parameters were: FOV 24 cm, matrix 156×102 (partial Fourier), 5 mm slices, TE 83 ms. TR was set to 4 s, but the acquisitions with FOV updates additionally included waiting for calculation of motion estimates. Diffusion encoding was performed in 25 directions with b=1000 s/mm2. GRAPPA was performed with R=3, but the b=0 s/mm2 volume was acquired without acceleration, i.e. 3-shot, allowing calculation of GRAPPA weights.
Since the FOV was updated each shot and slice, zero- and first-order phase correction between k-space lines of opposite polarity was made for each shot and slice according to the phase reference lines, to avoid Nyquist ghosting.
Results
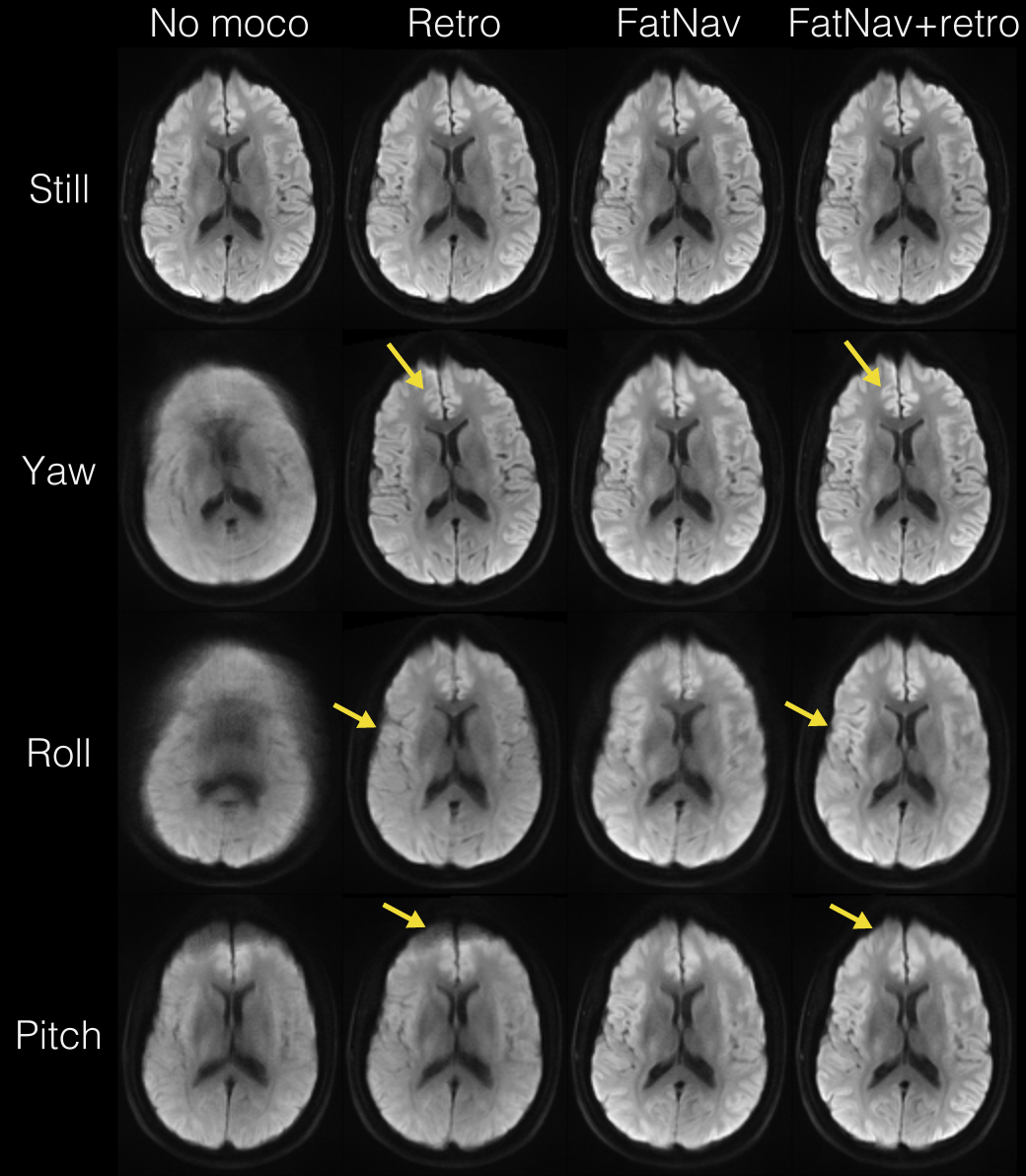
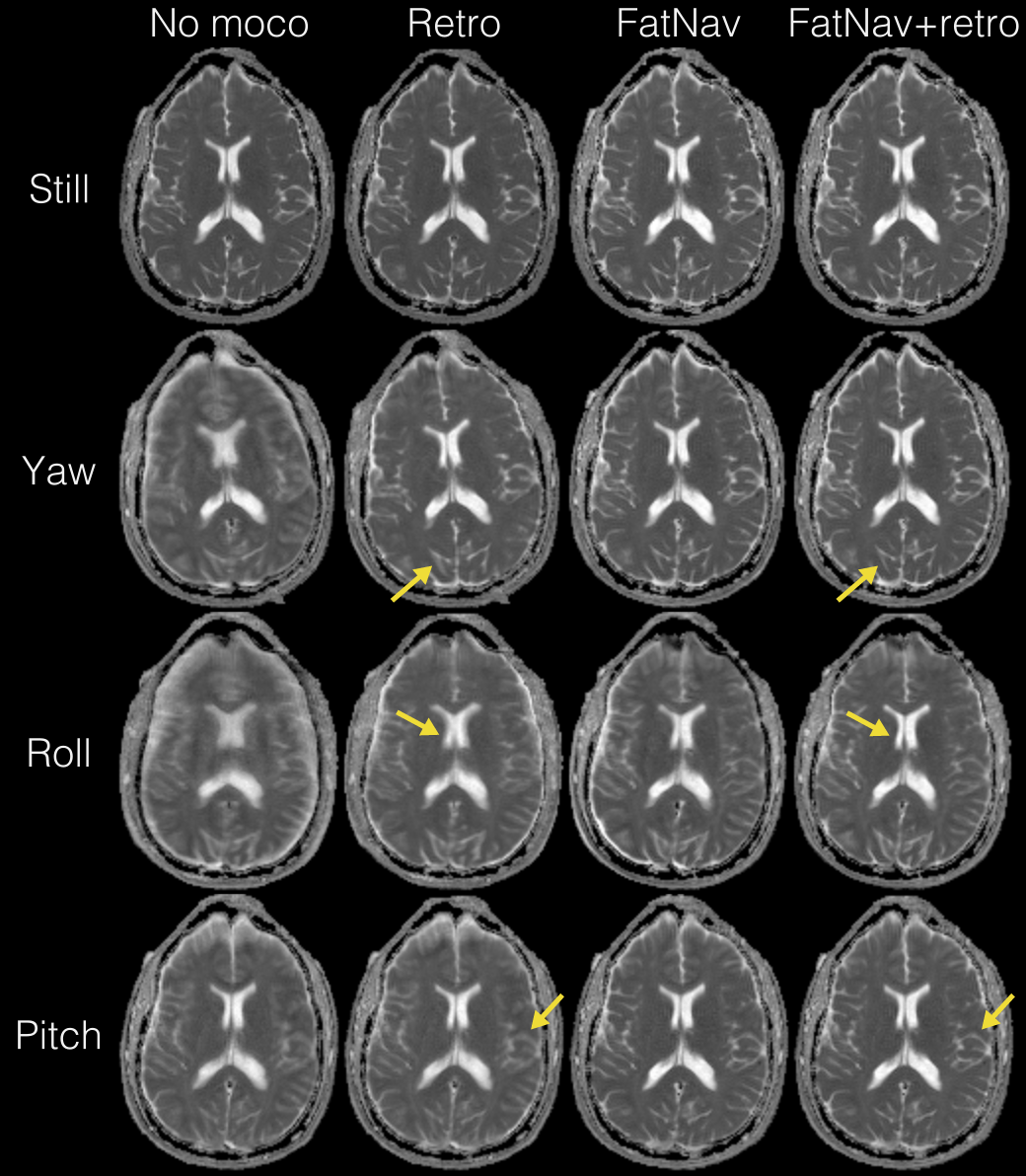
The navigator playout brought a scan time penalty of about 20%. The motion patterns, as estimated from the navigator, are shown in Fig. 3. The motion range was quite extreme (20° for yaw, 25° for roll, and 20° for pitch) and the motion patterns were similar for acquisitions with and without FOV updates. The reconstructed images for the four motion patterns and the four combinations of motion correction (no correction, retrospective only, prospective only, and both prospective and retrospective) are shown in Fig. 4 (mean diffusion) and Fig. 5 (ADC). Importantly, the acquisitions without motion are not degraded by the prospective correction. For all acquisitions with motion, the image quality for the combination of prospective and retrospective correction is superior to prospective or retrospective correction alone. Comparing combined prospective and retrospective correction against retrospective correction only, the improvement in image quality is quite small for the “yaw” motion, and quite large for the “roll” and “pitch” motions.Discussion & Conclusion
This experiment demonstrates that prospective motion correction by projection fat navigators is capable of decreasing the motion sensitivity of DWI, even in the presence of very large motion. For in-plane motion (“yaw”), prospective and retrospective motion correction were able to achieve an image quality similar to the acquisition without motion. For through plane motion (“roll” and “pitch”), some residual blurring remains. Still, the image quality is significantly improved compared to retrospective correction alone. Even with perfect prospective correction, some blurring due to B0 distortion is expected, since the susceptibility-induced field will vary with head position.
Even with very small FOV updates, it is essential to perform ghost correction for each update. This works well with the added phase reference lines. The GRAPPA weights could also be rotated along with the FOV. This was not done in these experiments, but despite the large motion, no aliasing artifacts were seen.
The scan time penalty can be reduced by playing the navigator less often, but the current bottleneck is the calculation of motion estimates, which takes about 0.2 s per navigator.
Acknowledgements
No acknowledgement found.References
- Herbst M, et al. “Prospective motion correction of segmented diffusion weighted EPI”. Magn Reson Med 2015;74:1675–1681.
- Engström M, et al. “Collapsed fat navigators for brain 3D rigid body motion”. Magn Reson Imaging 2015;33:984–991.
- Skare S, et al. “An Abstraction Layer for Simpler EPIC Pulse Programming on GE MR Systems in a Clinical Environment”. ISMRM 2017 (#3813)
- Avventi E, et al. “Projection-based 2D/3D registration of collapsed FatNav data for prospective motion correction”. ISMRM 2015 (#584)
Figures