1734
Design of an electromagnetic actuator for magnetic resonance elastography1Soochow University, Suzhou, China, 2the First Affiliated Hospital of Soochow University, Suzhou, China
Synopsis
We introduced a novel design of electromagnetic actuator for magnetic resonance elastography. The actuator consists of a vibration control module and an actuation module. The actuation frequency and magnitude were manually tuned in a control panel of the control module. The actuation module could be easily converted to imaging phantom, organs of the abdomen region and the brain. Results showed a steady elastic wave propagation at gel phantom, liver, and brain tissues.
Introduction
The clinically approved and implemented actuators for MRE is a pneumatic actuator system working on the liver that proves to be reliable and effective (1). For other organs, phantoms, and animals, researchers have developed different forms of actuators (2, 3). However, a simple and reliable actuator that can be used to measure different tissues or phantoms is still desirable. In this study, we introduced a flexible and portable MRE actuator that could be used for phantom, brain, and abdominal imaging. The simplicity and flexibility of the design could provide convenient and comfortable clinical experiences for patients. In addition, the actuator could also be used to image a variety of different phantoms. With compactly designed controller and actuation system, the light-weighted actuator assembly has a miniature size and is easily portable. We demonstrated the applications of the actuator for different tissues with multiple frequencies.Methods
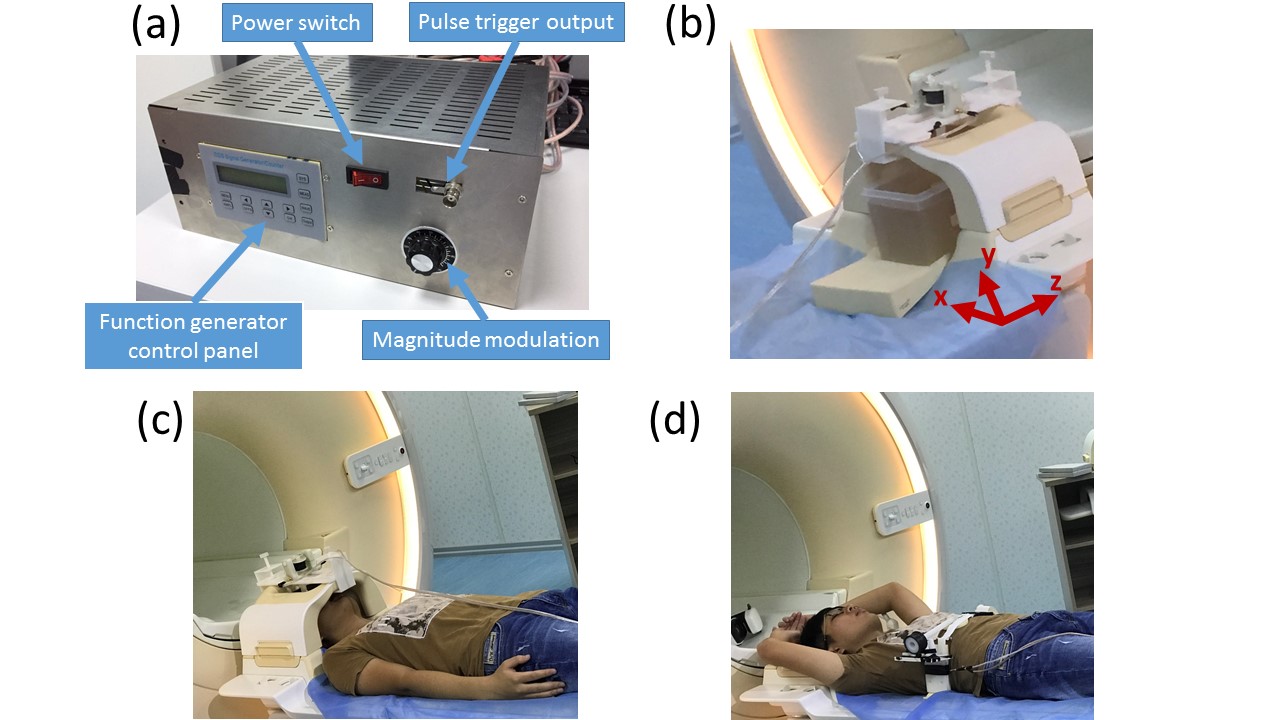
We adopted a module-based design to facilitate the flexible applications of the actuator. The actuation system was separated into a vibration control module (Figure 1a) and an actuation module (Figure 1b). The custom-built control module consisted of a function generator unit and a power amplification unit. The trigger signal from MR scanner was received via a BNC connector to synchronize the actuation motion with the scanning sequence. A knob was used to modulate the vibration magnitude manually. The scale of the vibration magnitude was tunable from 0% to 100% with respect to the maximum power output. Insulated power cords were used to transmit the amplified current to the electromagnetic actuator.
The phantoms were made of gelatin (Knox) and glycerol, which were prepared using a previously reported protocol (4, 5). Samples were placed in a plastic container with a dimension ~ 150x130x140 mm3. For vibration transmission, a small rectangular plastic plate connected with the actuation unit with was placed on top of the gel phantom. Transverse images were acquired at 3 adjacent slices with a voxel size of 0.625x0.625x6 mm3. We measured the brain tissue with an actuation frequency of 50 Hz. For liver imaging, a circular-shaped vibration pad was placed on the abdomen region right above the liver. A soft bandage was wrapped around the body to make sure the vibration pad was closely attached to the abdomen surface. The image in the transverse plane was acquired with a voxel size of 1.3x1.3x8 mm3, and the actuation frequency was set to 60 Hz.
Results
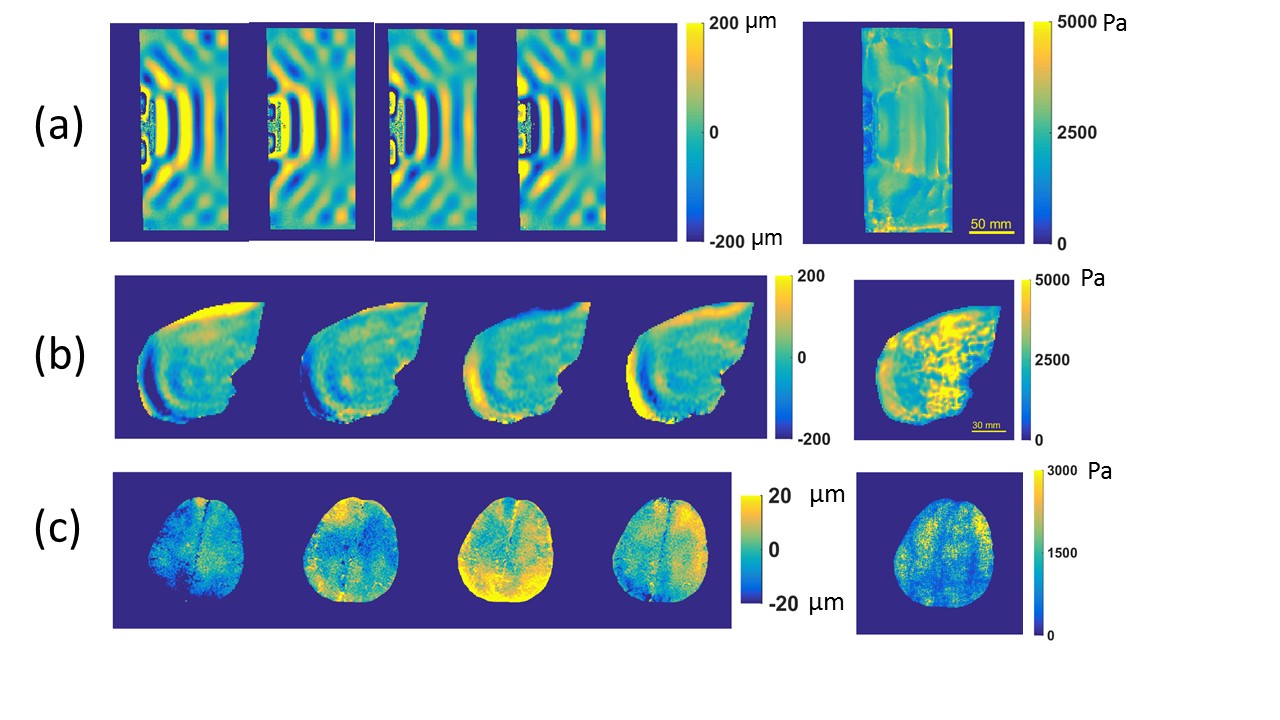
Apparent elastic wave propagations were observed for both phantom, liver, and brain tissues (Figure 2). The estimated average shear modulus for the gel phantom, liver, and brain tissues was about 2.5 kPa, 2 kPa, and 1.0 kPa, respectively. Results showed a great flexibility of the actuator in imaging both phantom and human tissues. The corresponding patient set up was relatively easy and the placement of the vibration pad could be adjusted. This showed that the actuator could also be used to image other parts of the abdomen region for different organ imaging.Discussion
In this study, we designed and built an electromagnetic actuator along with a control system for MRE measurement. We demonstrated that the actuator could be used for both phantom and human imaging at multiple frequencies. The actuator could be easily converted to image either phantom or human tissues. By simple adaptations of the design mechanisms, the actuator could be easily used to image other abdomen regions. Future studies include applying the actuator to carry out clinical studies to extend the usage to a variety of different regions or organs.Acknowledgements
We would like to thank Prof. Philip V. Bayly for introducing us to the field of MRE and helpful discussions. Funding is provided by grant 61503267 (YF) from National Natural Science Foundation, grant BK20140356 (YF) and 16KJB460018 (YF) from Jiangsu Province, and by grant K511701515 (YF) from Scientific Research Foundation for the Returned Overseas Chinese Scholars, State Education Ministry. Support from Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD) is also acknowledgedReferences
1. Venkatesh SK, Ehman RL. Magnetic Resonance Elastography of Liver. Magnetic Resonance Imaging Clinics of North America. 2014;22(3):433-46.
2. Uffmann K, Ladd ME. Actuation systems for MR elastography: design and applications. IEEE engineering in medicine and biology magazine : the quarterly magazine of the Engineering in Medicine & Biology Society. 2008;27(3):28-34.
3. Latta P, Gruwel ML, Debergue P, Matwiy B, Sboto-Frankenstein UN, Tomanek B. Convertible pneumatic actuator for magnetic resonance elastography of the brain. Magn Reson Imaging. 2011;29(1):147-52.
4. Okamoto RJ, Clayton EH, Bayly PV. Viscoelastic properties of soft gels: comparison of magnetic resonance elastography and dynamic shear testing in the shear wave regime. Physics in Medicine and Biology. 2011;56(19):6379-400.
5. Feng Y. Dynamic Deformation and Mechanical Properties of Brain Tissue: Washington University in St. Louis; 2012.
Figures