1505
Intra-operative MRI with MR detectable endoscope using tunable lens filled with MR contrast agent1Department of Bio and Brain Engineering, Korea Advanced Institute of Science and Technology, Daejeon, Republic of Korea
Synopsis
During brain surgery, location of lesions can change in real-time due to leakage of cerebrospinal fluid. Therefore, navigating an MR-Endoscope probe with real-time intraoperative MRI is important in clinical application. However, conventional tracking system attached to the endoscope probe induces severe artifacts and is expensive and bulky. In this study, we propose a technique for navigating the endoscope probe without additional tracking system through segmentation of signals from tunable lens filled with gadolinium contrast agents. We also demonstrated tunable liquid-filled lens endoscope for intraoperative MRI. The proposed system/approach would be a good alternative as a tracking system for intraoperative MRI.
Introduction
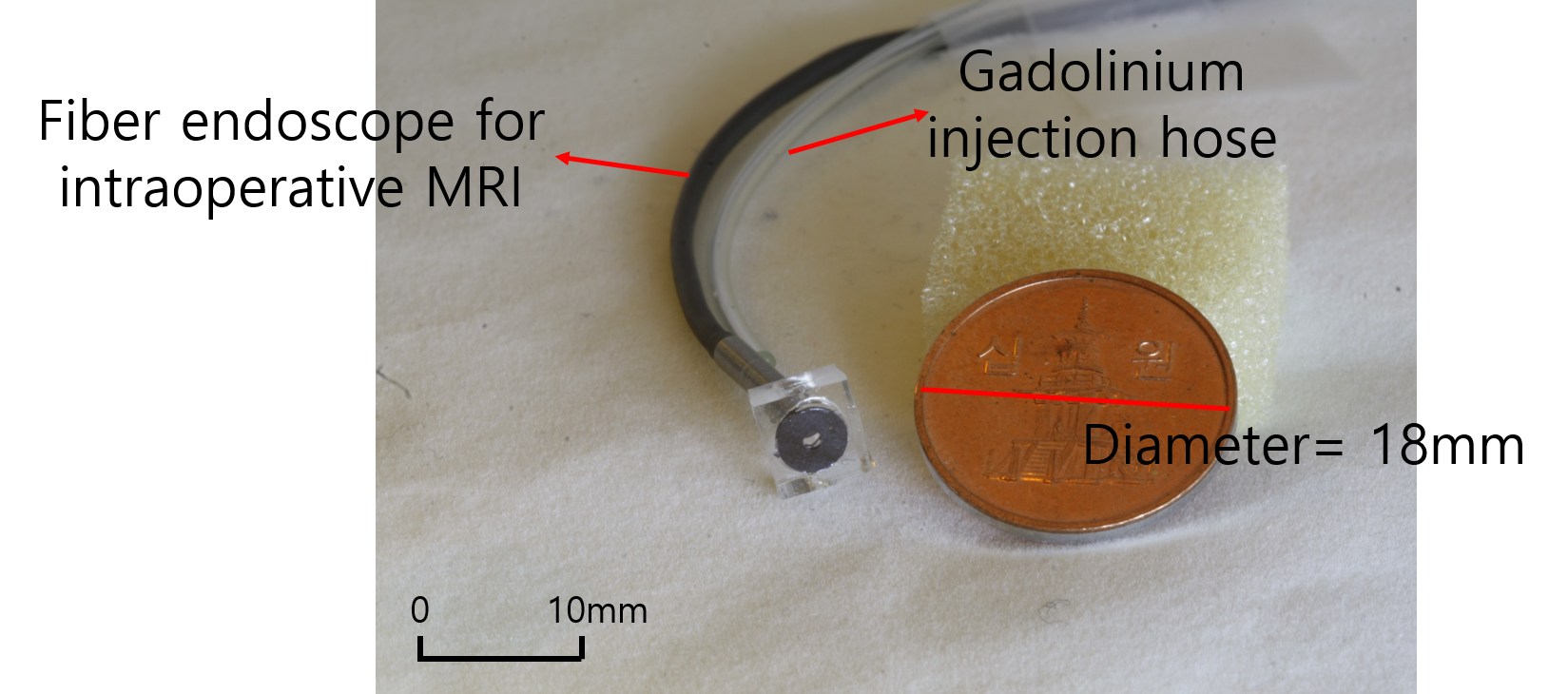
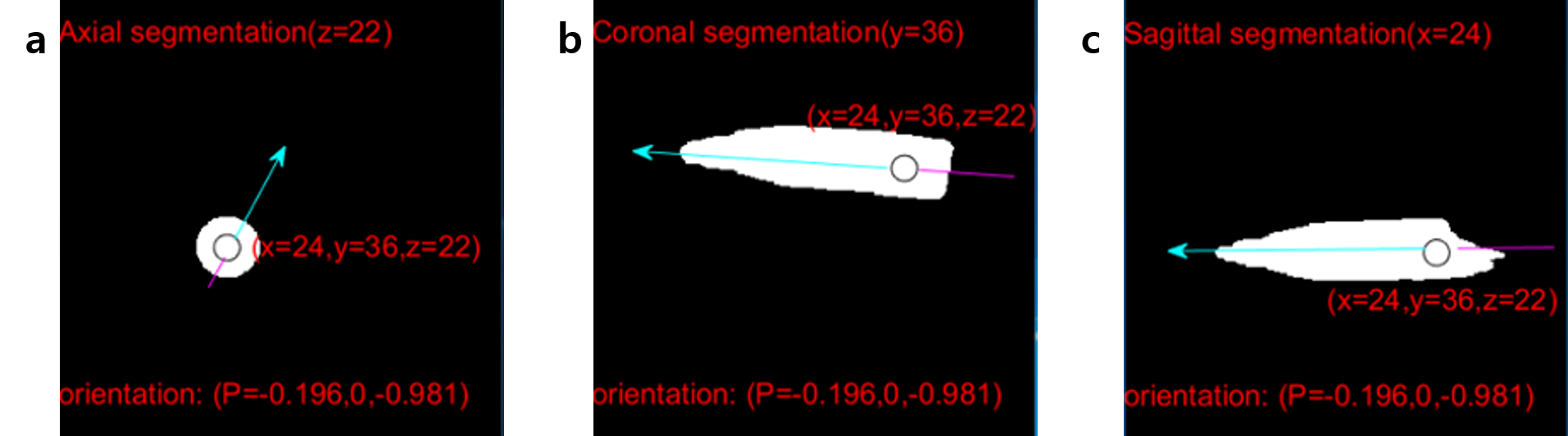
In order to verify the position and orientation of MR-Endoscope in human brain during intra-operative MRI, it is crucial to navigate the MR-Endoscope. However, the conventional tracking system during operation is required to additional tracking device, which is expensive bulky, and when the detectable sensor of the device is scanned in MRI, it could induce image artifact. Also, tunable focus lens endoscope can vary the field-of-view (FOV) by changing the focal length and minimizing mechanical movement. Tunable focus lens endoscopes are classified into liquid-crystal (LC) type, electrowetting on dielectric (EWOD) type, and liquid-filled type. Liquid-filled type is the most suitable type for intraoperative MRI because it can be miniaturized by applying pneumatic pressure and does not induce metal artifact with no electronic device. In this work, we propose (i) MR-Endoscope tunable liquid-filled lens, which could be controlled by changing the pressure as injected gadolinium (Fig. 1). Also, we propose (ii) The technique navigating the MR-Endoscope lens, which is filled with gadolinium contrast agents using MRI segmentation by thresholds and no additional tracking device is needed (Fig. 4). In particular, for ultrafast MRI imaging, balanced steady-state free precession (bSSFP) sequence is used since it enables to have higher signal-to-noise ratio (SNR) per unit time, and reduce the data acquisition time effectively, and get better T2/T1 contrast.Methods
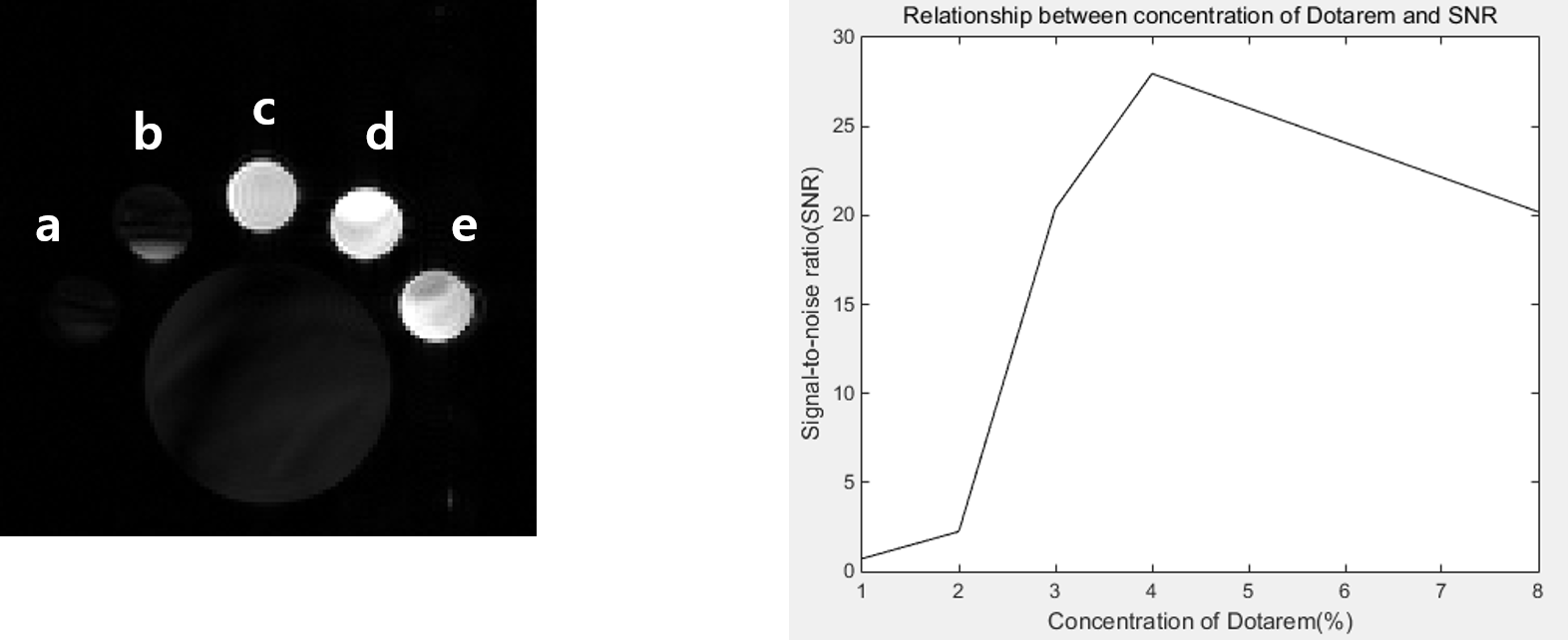
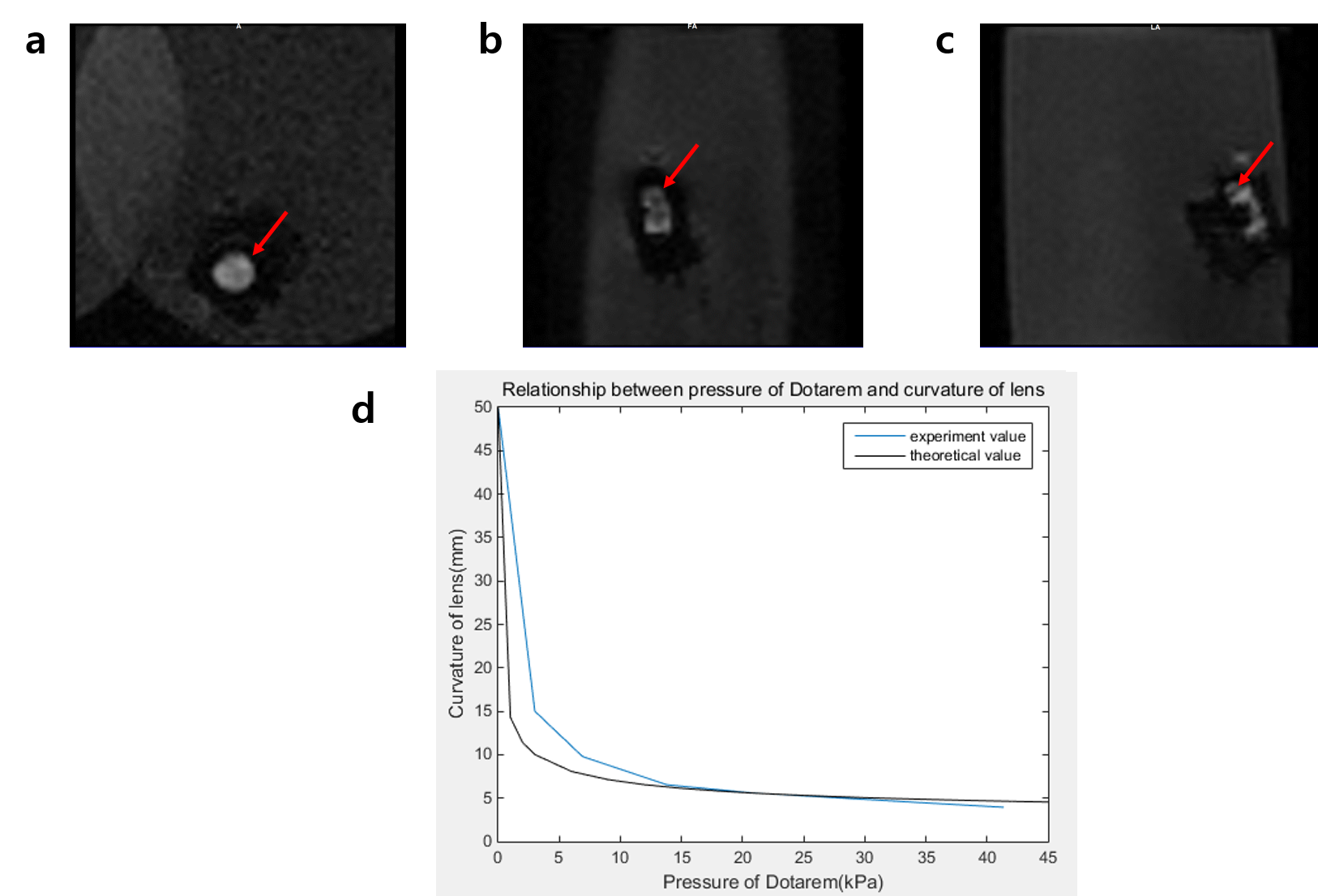
All experiments were performed on a 3 Tesla animal scanner (MR solutions, Guildford, UK). The 3D bSSFP sequence was used with scan parameters of FOV= 60mm, matrix= 128x128x32, flip angle=30, TR/TE= 2.6/5.4ms. To optimize the concentration of gadolinium (Meglumine Gadoterate, Dotarem), phantoms with various concentrations of 1%, 2%, 3%, 4%, and 8% were generated and tested for MR imaging. To compare differences in signal intensity, we set a region of interesting (ROI) and calculated the signal-to-noise ratio (SNR). The gadolinium solution of the optimal concentration was injected into lens designed to be tuned by adjusting the pressure of the gadolinium solution. A homemade liquid-filled based lens was attached inside a tube, fixed in a water phantom. Lens consisted of 4 liquid-filled based channels with diameter of 4.0mm. As the pressure of the injected gadolinum solution increased (0, 3, 6.89, 13.79, 20.68, 27.58, 34.47, 41.37 kPa), it was observed that curvature of the lens relative to the focal point varied during MRI scan. To reduce banding artifact, we acquired bSSFP images at multiple phase cycling angles of 0°, 90°, 180°, and 270°. Navigation for MR-Endoscope were performed by segmentation using Matlab (The MathWorks, USA). MRI segmentations were conducted by intensity-based thresholding that demonstrated the tube which was filled with the gadolinium solution. Images were acquired along the axial, sagittal, and coronal directions and the axial plane with the highest number of pixels above the threshold level for analysis. Also, we found the center of the gadolinium-filled tube at the axial plane was also the middle of the coronal and sagittal planes. Since the gadolinium tube was inserted into water phantom straightly, the orientation was calculated using position vector.Results
SNR of the segmented lens was maximized at 4% concentration, therefore, 4% gadolinium solution was used to fill the tunable lens (Fig. 2). The curvature of the tunable lens was logarithmically decreased with the pressure (Fig. 3-(d)). The information of position and orientation of the lens could be displayed simultaneously after segmentation and calculation with Matlab (Fig. 4). As shown in Fig. 4, the orientation of the tube could be calculated as a unit vector in a similar way to the conventional tracking devices.Discussion
The focal length of the tunable liquid-filled lens, which was filled with the optimized concentration of gadolinium (4% in this study), was adjustable by changing the pressure of the solution using a pneumatic pressure device. It can enable us to view the wide tuning range and did not need a separate mechanical adjustment through our homemade tunable liquid-filled lens. Upon connection of the MR-Endoscope fiber with CCD camera and PC, it would be possible to visualize the lesion in human brain during surgery. Since navigating the tunable lens filled with MR contrast agent is also possible, it would be also possible to navigate the MR-Endoscope during brain surgery in real-time MR imaging.Conclusion
The described technique was designed to navigate the tunable liquid-filled lens filled with gadolinium for MR-Endoscopy during human brain surgery using bSSFP. It does not require any other expensive bulky tracking device. Also, our navigating system using gadolinium segmentation would be suitable for clinical intraoperative MRI for minimally excised surgery.Acknowledgements
No acknowledgement found.References
1. D Beyersdorff, et al. MR imaging-guided prostate biopsy with a closed MR unit at 1.5T: initial results. Radiology, 2005; 234:576-581
2. Jeong, K-H, et al. Tunable microdoublet lens array. Optics Express, 2004; 2494-2500
3. A de Oliveira, et al. Automatic passive tracking of an endorectal prostate biopsy device using phase-only cross-correlation. MRM, 2008;59:1043-1050
4. GS Fischer, et al. Pneumatically operated MRI-compatible needle placement robot for prostate interventions. IEEE, 2008; doi: 10.1109/ROBOT.2008.4543587.
Figures