1169
Noise navigator based motion detection and compensation1Radiotherapy, UMC Utrecht, Utrecht, Netherlands
Synopsis
The feasibility of irregular and unpredictable motion detection and retrospective head motion artifact removal was demonstrated based on the noise navigator. The key advantages of the noise navigator are its inherent synchronization with MR acquisition, compatibility with most read-out strategies and no additional acquisition or hardware is required. Only the raw k-space data needs to be available for this method.
Introduction
Motion during image acquisition results in motion artifacts and degrades diagnostic quality. This issue especially affects 3D acquisitions due to relatively long acquisition times (i.e. minutes) compared to the motion timescale (i.e. seconds). Motion artifact reduction requires motion detection. The noise navigator can detect breathing1, but could in theory detect any motion that induces tissue displacement that affects the thermal noise variance measured by an RF receive coil. Hence, irregular motion detection and retrospective artifact removal based on the noise navigator was explored.Methods
Four healthy volunteers were scanned on a clinical 1.5T MR scanner (Ingenia, Philips Healthcare, Best, NL) using a 16 channel head and neck receive array for signal detection. All MR acquisitions had a maximum FOV (i.e. 56cm) and four times oversampling in read-out direction to ensure maximum proton free regions for noise navigator calculation. This does not affect the SNR or acquisition time. The thermal noise and MR signal were spatially disentangled in read-out direction by a 1D Fourier transform. Then the thermal noise variance was calculated over the proton free area per k-space line for each receive channel within the array. The individual channel noise variances were normalized to their median and subsequently demeaned. Principal component analysis was performed in channel dimension to maximize motion detection sensitivity. The first principal component was selected as a noise navigator.
The detection of irregular and unpredictable motion was tested with yawning and coughing experiments. As a validation, the noise navigator was acquired simultaneously with continuously collected sagittal RF-spoiled incoherent GRE cine MR frames centered in the middle of the neck. A 2D image navigator was calculated from these cine MR frames (with an optical flow algorithm) and then compared to the noise navigator. For comparison purposes the mean and standard deviation of the image navigator was scaled to match the noise navigator.
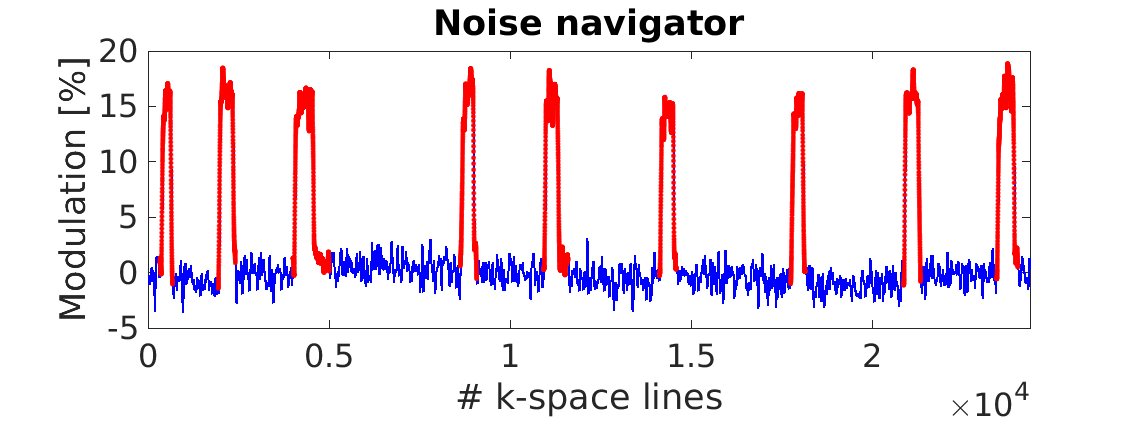
Motion compensation was tested with clinically used Cartesian 3D multi-shot ultrafast GRE sequences (1mm3 voxel size, TR = 8.8ms, TE = 4.1ms, FA = 10°) and 3D TSE FLAIR sequences (1.2mm3 voxel size, TR = 4.8s, TE = 657ms, and 1660ms inversion delay). Peak detection was used to find motion events. All k-space lines around the detected peaks with a modulation higher than 0.5% were considered corrupted. The corrupted k-space lines were removed and the motion compensated image was reconstructed with Tikhonov regularized iterative SENSE2.Results
Figure 1 shows the first thirty seconds of an example yawning experiment. The temporal behavior detected by the image and noise navigators are very similar. The first thirty seconds of a coughing experiment are shown in Figure 2. Notice that both the image and noise navigators detect coughing at the same time. The image navigator detects an increase during a cough, whereas the noise navigator signal decreases first and increases suddenly around the time a peak is detected by the image navigator. Figure 3 shows the noise navigator per k-space line used for motion compensation due to head motion in Figure 4. It can be seen that head motion during MR acquisition resulted in a sudden modulation increase up to 18%. The k-space lines indicated in red are the ones that were excluded in the motion compensated reconstruction (as shown in Figure 4). In Figure 5 the motion corrupted and compensated FLAIR images are shown.Discussion
The noise and image navigator signals are more alike for the yawning experiment than the coughing experiment. The bipolar behavior of the noise navigator during coughing, could be due to the two-step motion that is typical for coughing. From the images it can be seen that first the volunteer inspired some air, followed by coughing.
As a feasibility study the corrupted k-space lines, according to the noise navigator, were retrospectively removed and an MR image with reduced artifacts was reconstructed. The motion compensated MR images still contained some artifacts (especially close to the edges of the brain). The most likely cause of these artifacts is that the volunteer did not exactly return to the same position after moving. This cannot be repaired with the simple method employed here. Instead a head motion model3 would need to be created, in a similar way as shown for 4D respiratory motion prediction in the abdomen4.
Conclusion
The noise navigator could successfully detect yawning and coughing. Moreover, it is feasible to retrospectively detect k-space lines that were corrupted by head motion. Motion artifacts were effectively reduced in brain MR images by discarding these corrupted readout lines and subsequently applying a parallel imaging reconstruction. The key advantages of the noise navigator are its inherent synchronization with MR acquisition, compatibility with most read-out strategies and no additional acquisition or hardware is required.Acknowledgements
No acknowledgement found.References
1. Andreychenko A, et al. Thermal noise variance of a receive radiofrequency coil as a respiratory motion sensor. Magn Reson Med. 2017;77(1):221-228. doi: 10.1002/mrm.26108
2. Pruessmann KP, et al. Advances in sensitivity encoding with arbitrary k-space trajectories. Magn. Reson. Med. 2001;46: 638–651. doi:10.1002/mrm.1241
3. Gong E, et al. Motion Estimation from Noise Intrinsic Correlation between RF Channels (MECHANICS). Proc. Intl. Soc. Mag. Reson.
Med. 25 (2017) p 3671
4. Navest RJM, et al. 3D Motion Quantification Based on the Temporal Evolution of the Noise Covariance Matrix of a Receive Array. Proc. Intl. Soc. Mag. Reson.
Med. 25 (2017) p 3949
Figures