1018
Magnetic Field Fingerprinting (MFF)1Siemens Healthcare GmbH, Erlangen, Germany, 2Max Schaldach-Stiftungsprofessur für Biomedizinische Technik, Friedrich-Alexander-Universität Erlangen-Nürnberg, Erlangen, Germany, 3Biomedical Engineering, Case Western Reserve University, Cleveland, OH, United States, 4Georg-August-Universität Göttingen, Göttingen, Germany, 5Radiology, Case Western Reserve University, Cleveland, OH, United States
Synopsis
Parameter maps obtained from Magnetic Resonance Fingerprinting (MRF) are sensitive to magnetic field inhomogeneities. Most MRF publications are based on FISP to minimize the dependency on B0. In FISP however, the magnetization is spoiled at the end of every TR resulting in lower T2 differentiation capability and SNR compared to TrueFISP. We propose an MRF variant that applies TrueFISP, FISP and FLASH in a continuous acquisition, and additionally incorporates B1 and B0 in the dictionary, which are resolved by a pattern match. This implementation enables increased spiral resolution and spiral deblurring with the derived high-resolution B0 maps.
Purpose
Magnetic Resonance Fingerprinting (MRF)1 is a new technique that promises multi-parametric, quantitative MRI. A series of RF pulses generates a complex signal response in a non-steady-state. For each voxel, the measured complex signal evolution is then matched against a series of simulated signal evolutions for different parameters, forming a dictionary.
The TrueFISP-based MRF1 with a B0 dimension was widely replaced by a FISP2 version, mainly due to B0-related problems such as null bands. However, imperfections of the RF transmit field are another source for systematic errors in MRF results that requires mitigation3,4,5.
Because there is no reliance on a steady-state, MRF theoretically does not require a single sequence framework throughout an acquisition. In this work we utilize this flexibility and combine TrueFISP, FISP, FLASH in a single continuous acquisition. B0 and B1+ related signal changes are intrinsically accounted for by adding a B1+ and B0 dimension to the dictionary with subsequent matching of these field parameters. This implementation enables higher undersampling and improved resolution. Resulting high-resolution B0 maps can furthermore be used for spiral deblurring and may aid in diagnosis.
Methods
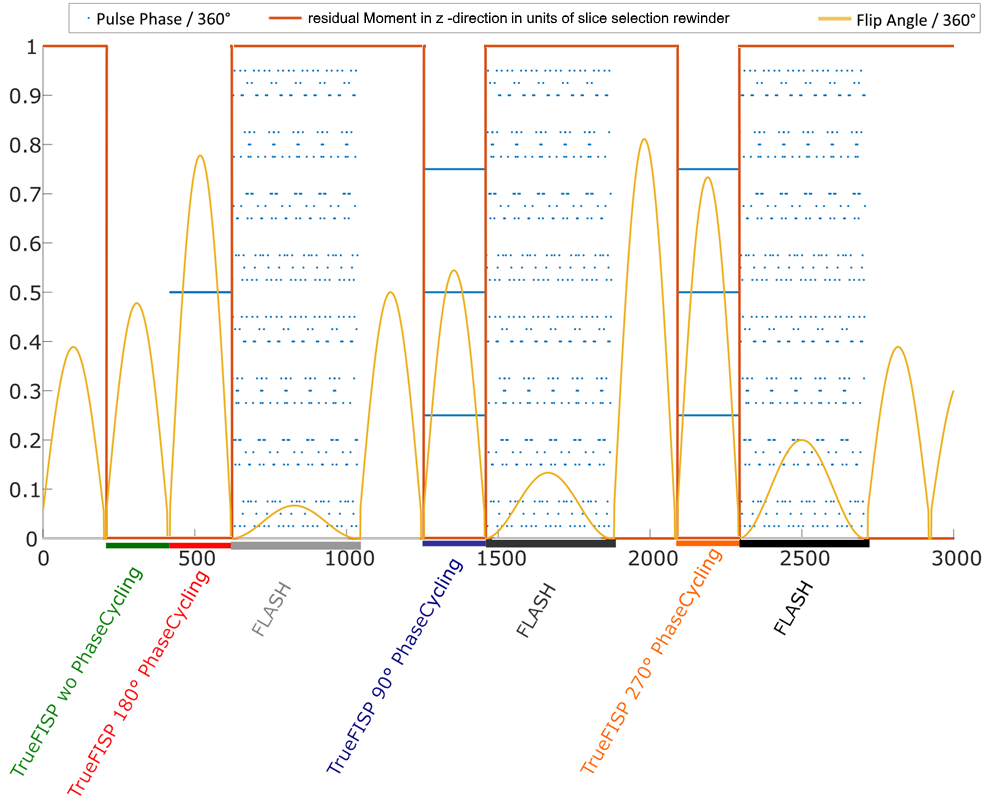
Our prototype sequence configuration, depicted in Figure 1, consists of a total of 3000 echos at a constant TR of 12ms. In each of the TrueFISP segments a different phase cycling is used to ensure high and differentiable signals with respect to B0. The FLASH parts yield signals with negligible T2-sensitivity.
A dictionary was simulated with B0 ranging from -41 to 41 Hz, relative B1 from 0.7 to 1.3, T1 from 200 to 3000 and T2 from 10 to 300 ms. Because of the constant TR, two spin ensembles with a frequency difference that is an integer multiple of 1/12ms=83.33 Hz experience almost the excact same evolution. Therefore the dictionary size can be substantially limited, to a range of +-41 Hz. In order to assess higher off-resonances, the echo time in each of the FISP segments is slightly different but constant throughout one segment. The phase differences serve for computing a coarse B0 map for unwrapping.
With the first pattern matching step all four parameters are resolved. An additional spiral deblurring step using a frequency-segmented method6 is implemented with a following second matching step using the deblurred images. A third step is implemented as previously reported7. By only matching FLASH segments and keeping T1,T2 fixed to a certain range around the previous result, B1+ can be resolved in voxels experiencing flow.
We use spiral trajectories with a Tan-Meyer8 correction, resolutions vary from 1.2 to 0.8 mm inplane, slice thickness of 5 mm and undersampling factors from 48 to 90 with a spiral rotation of 82.5°9,10 at each TR. The method was tested in healthy volunteers’ brain, abdomen and knee. All scans were performed on a clinical 3T MR scanner (MAGNETOM Skyra, Siemens Healthcare, Erlangen, Germany).
Results
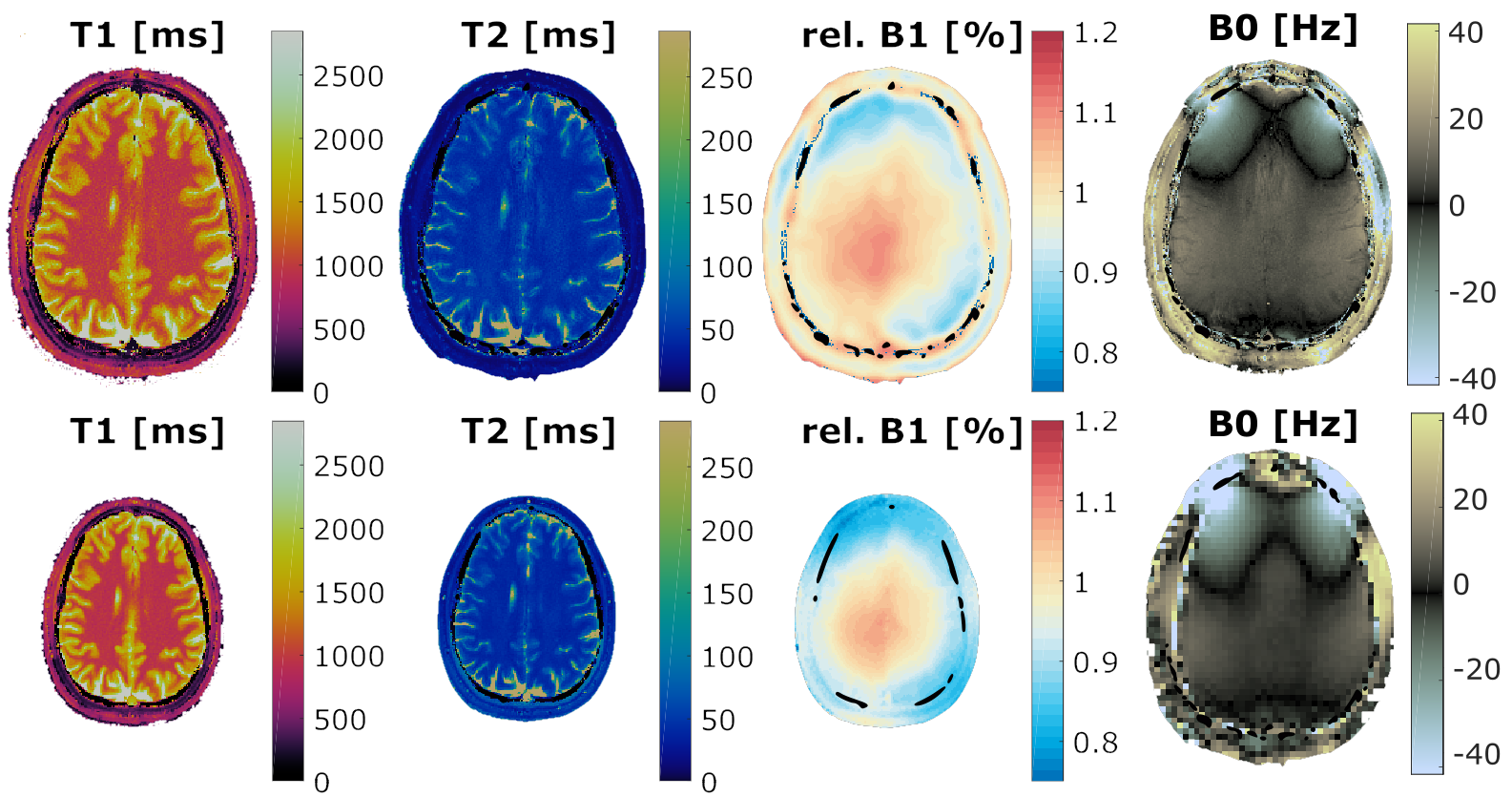
Figure 2 shows T1,T2,B1+ and B0 maps obtained with the novel encoding in a human brain. For comparison, the corresponding results from the original FISP-MRF with a prescan11-based B1+ correction and conventional B1+ and B0 mapping sequences are shown. All parameter maps are in good agreement.
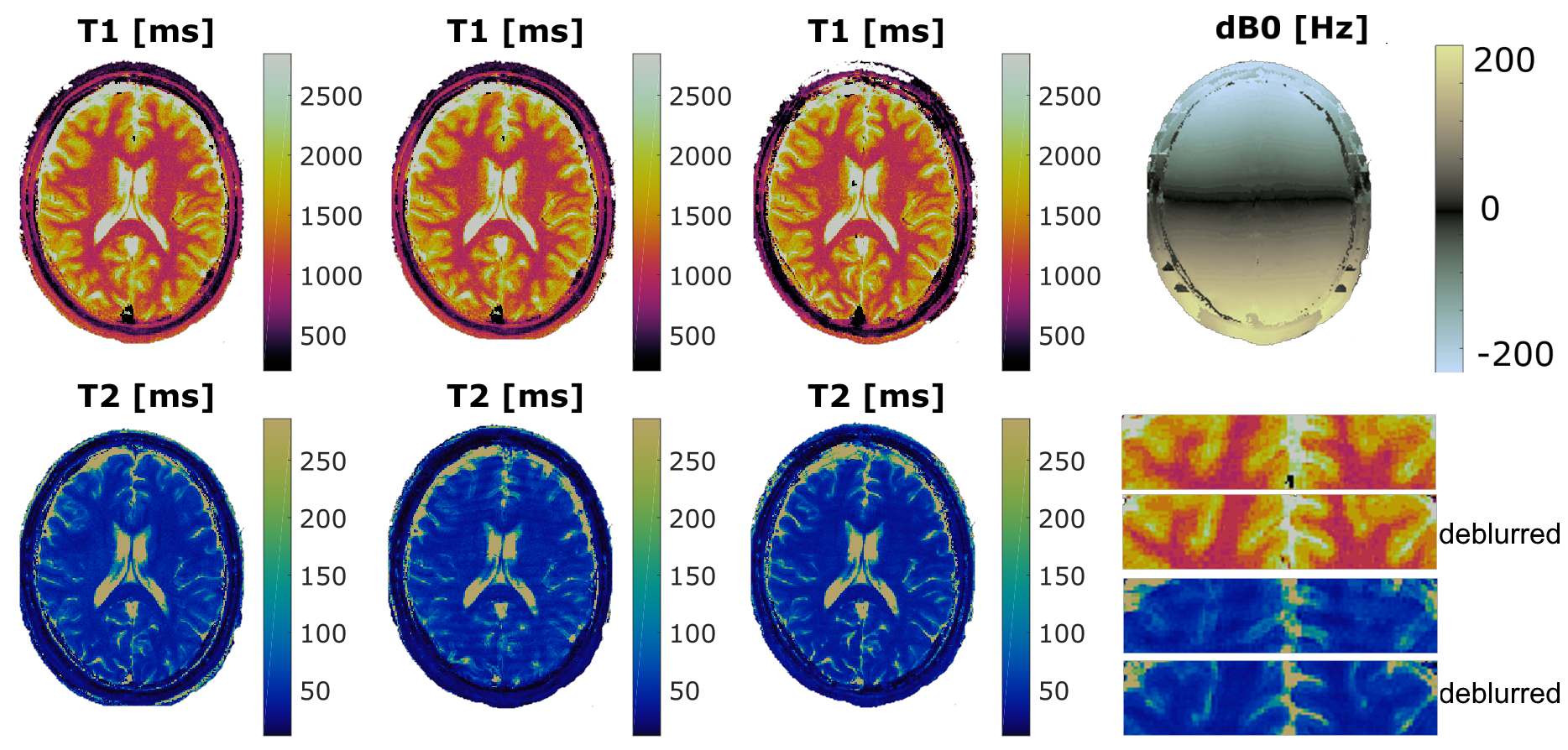
Figure 3 shows the effect of spiral deblurring in a human brain. Maps were acquired using the novel encoding with and without an additional B0 shim offset in y-direction. The quality of parameter maps acquired at high off-resonances can be substanially improved.
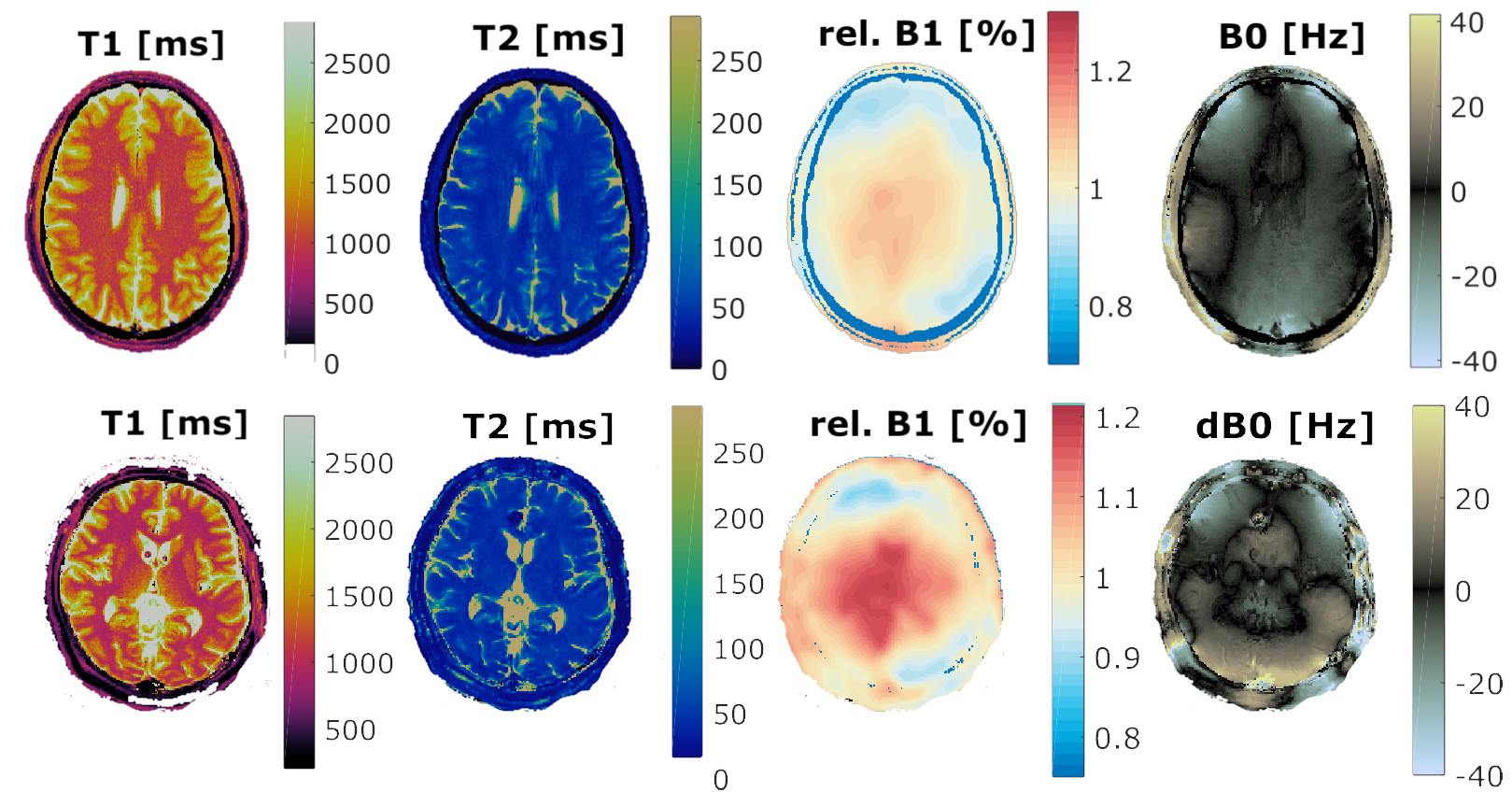
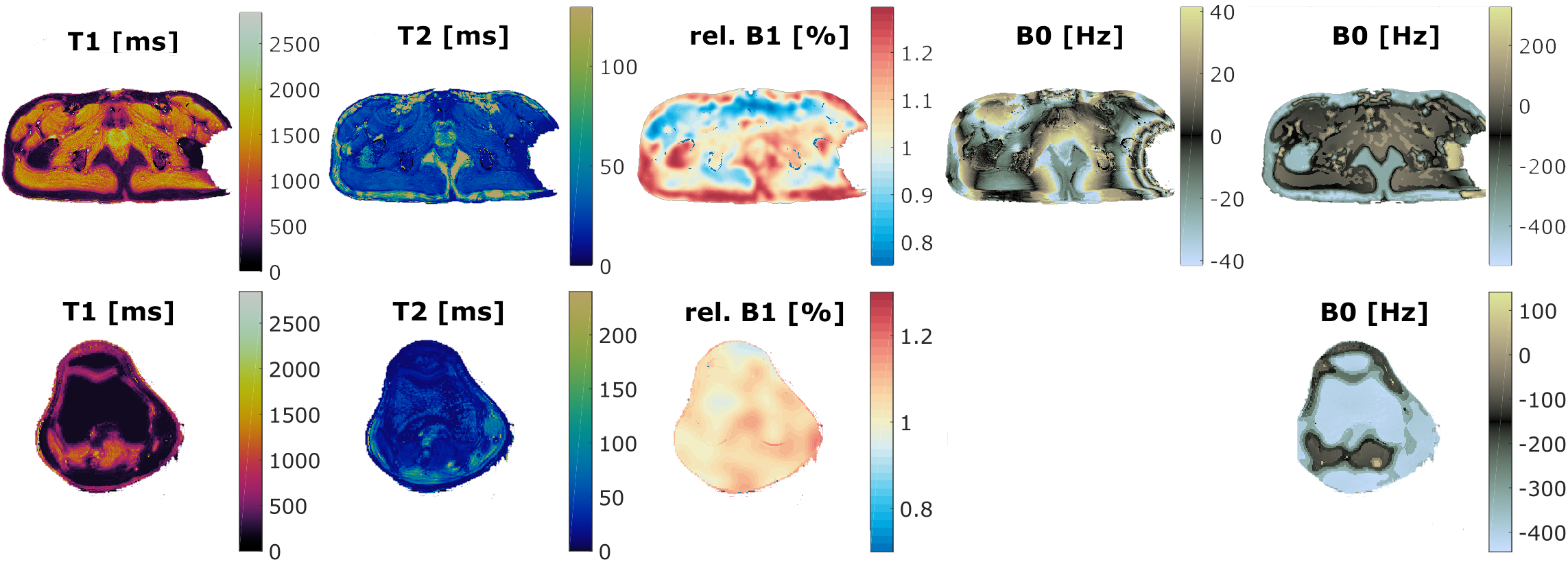
Figure 4 shows MFF results with an undersampling factor of 90 for an increased resolution of 0.8 mm in-plane. The parameter maps are free of artifacts by visual inspection, though an almost twice as big undersampling factor is used. The bottom row in figure 4 shows results from a different volunteer with a cavernoma. The susceptibility changes in the lesion can be seen in the B0 map as abrupt changes.
Figure 5 displays results in the prostate and knee. In the unwrapped B0 maps the off-resonance difference between fat and water can be well observed.
Discussion & Conclusion
A comprehensive set of T1, T2, B0 and B1+ maps is obtained from a single scan with MFF being free of artifact and comparable to conventional methods at increased resolution and without scan time prolongation as compared to the original FISP MRF2. The additional B0 and B1+ field maps directly mitigate related errors in T1 and T2. Furthermore, the B0 map serves to enhance image quality by spiral deblurring and may aid in diagnostic tissue characterization by indicating local changes in susceptibility. The successful application of this technique is demonstrated in brain, prostate, and knee. A 3D implementation in combination with more sophisticated reconstruction methods for MRF is a future step.Acknowledgements
The authors would like to thank Dr. Craig Meyer (Departments of Biomedical Engineering and Radiology, University of Virginia, Charlottesville, Virginia) for the spiral design algorithm and the corresponding trajectory correction method.References
1 Ma D. et al, Magnetic resonance fingerprinting. Nature 2013;
2 Jiang Y. et al, MR fingerprinting using fast imaging with steady state precession (FISP) with spiral readout. MRM. 2015;
3 Buonincontri G et al, MR fingerprinting with simultaneous B1 estimation. MRM 2016
4 Buonincontri G et al, Spiral MR fingerprinting at 7 T with simultaneous B1 estimation. MRI 2017
5 Cloos MA. et al, Multiparametric imaging with heterogeneous radiofrequency fields. Nat. Commun. 2016;
6 Noll D, Reconstruction techniques for magnetic resonance imaging. PhD thesis, Stanford University, California, 1991.
7 Körzdörfer, G. et al, Robust B1+ sensitive FISP Magnetic Resonance Fingerprinting in Brain and Abdomen, ESMRMB 2017
8 Tan, H. and Meyer, C. H, Estimation of k-space trajectories in spiral MRI, MRM 2009
9 Pfeuffer, J. et al, Mitigation of Spiral Undersampling Artifacts in Magnetic Resonance Fingerprinting (MRF) by Adapted Interleaf Reordering. ISMRM 2017;
10 Körzdörfer, G. et al, Spatial biases in Magnetic Resonance Fingerprinting parameter maps arising from undersampling patterns. ISMRM 2017;
11 Chung S. et al., Rapid B1+ mapping using a preconditioning RF pulse with TurboFLASH readout, MRM 2010;
Figures