0661
Real-time motion and dynamic transmit/receive B1 correction of CEST in the human brain at 7T1High-Field MR Center, Department of Biomedical Imaging and Image-guided Therapy, Medical University of Vienna, Vienna, Austria, 2Department of Physics, University of Helsinki, Helsinki, Finland, 3Christian Doppler Laboratory for Clinical Molecular MR Imaging, Vienna, Austria, 4Athinoula A. Martinos Center for Biomedical Imaging, Department of Radiology, Massachusetts General Hospital, Harvard Medical School, Boston, MA, United States
Synopsis
Movement during MR imaging may cause significant motion artifacts that can impair the experiment. This is especially true in CEST imaging, which relies on comparison between images recorded at different time points during the experiment. We implemented a real-time motion correction method and a retrospective receiver sensitivity(B1-) correction based on volumetric EPI navigators interleaved with the CEST measurements. We tested these methods on phantoms and healthy volunteers. Together with adequate B0 and B1+ corrections, motion and sensitivity corrections may completely restore CEST data fidelity in the presence of involuntary head motion, thereby facilitating CEST imaging of restless patients.
Introduction
Chemical exchange saturation transfer (CEST) imaging is a novel molecular magnetic resonance (MR) imaging technique that is capable of measuring metabolite levels based on their proton exchange reactions.1 Patient motion during MR imaging is problematic and in worst case scenario may ruin the experiment and CEST imaging is no exception to this. In addition to movement artifacts, due to the nature of CEST imaging, motion induced changes in receiver sensitivity manifest as asymmetry in CEST spectra. This may lead to misinterpretation of CEST images.
We implemented real-time motion correction in the CEST sequence based on volumetric echo-planar navigators as previously reported.2 In addition, we propose a dynamic navigator-based retrospective receiver sensitivity (B1-) correction in addition to commonly applied transmit (B1+) corrections to further alleviate motion related artifacts
Methods
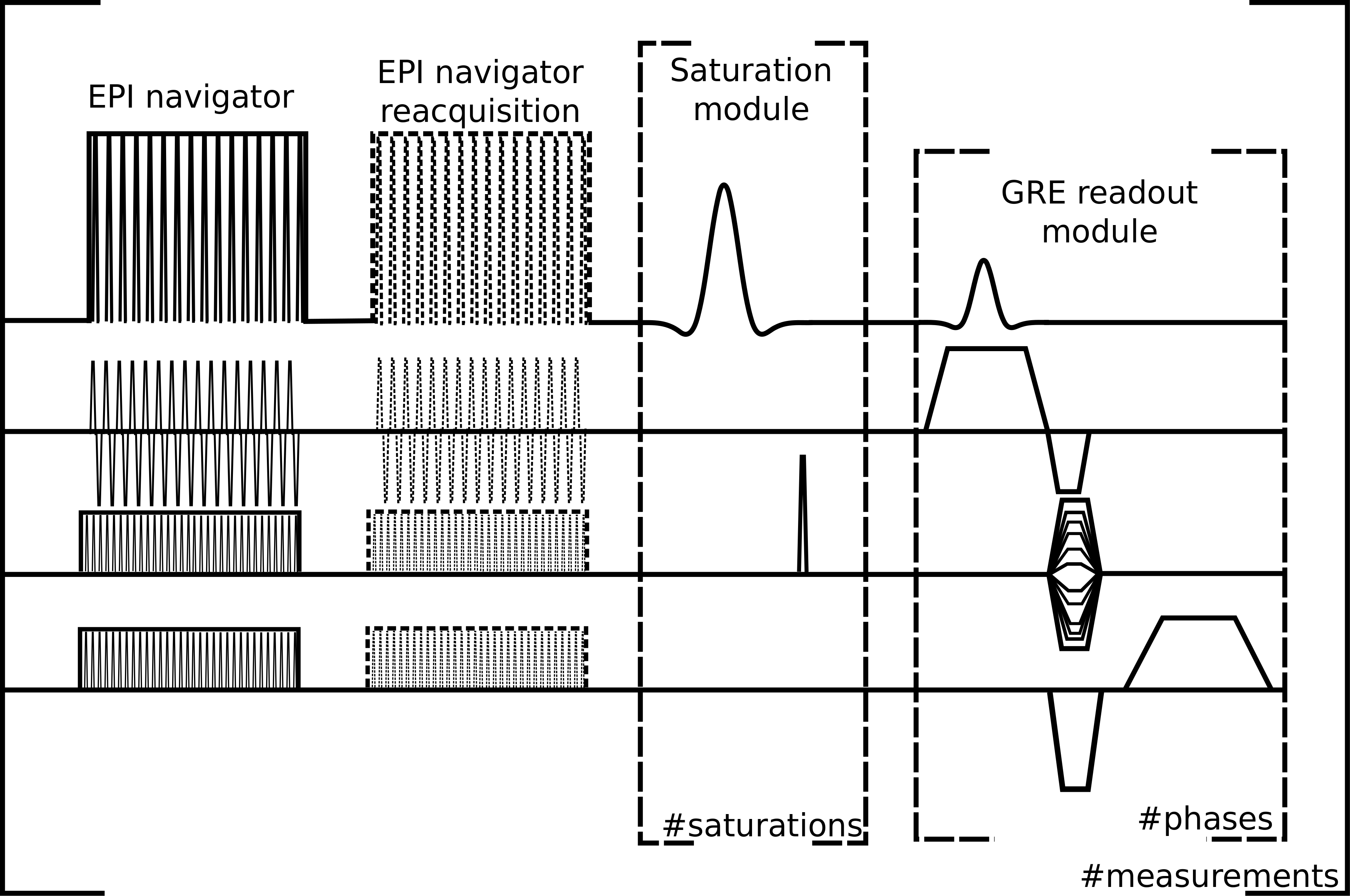
A volumetric echo-planar imaging-based navigator was acquired interleaved with all CEST offset acquisitions. Navigator images (Figure 5) were used for real-time motion correction during the CEST measurement. In case the patient moved too much (i.e., translation of >0.4 mm or rotation >0.4° per repetition with respect to the previous repetition) the navigator was reacquired (Figure 1). Changes in B1- receiver coil sensitivity due to patient movement were corrected in post-processing by using the navigator images. This was achieved by calculating the difference in intensity between navigator images with respect to the first navigator images of the sequence. These difference images were then normalised by the first navigator image to determine the relative change in intensity in each voxel. This relative change was then multiplied by two for adequate correction. These images were then smoothed and interpolated to match the matrix size and the slice location of the CEST images. B0-inhomogeneity was corrected dynamically based on B0-maps generated from dual echo CEST images.3 B1+ correction was based on Z-B1-correction where each CEST image is individually corrected based on a flip angle map.4 B1+ correction was applied before receiver sensitivity correction. CEST asymmetry maps were calculated by taking the difference between CEST images at -3.0 ppm and +3.0 ppm with respect to water and normalising by non-saturated CEST image.5
These methods were tested on phantoms and healthy volunteers. All imaging sequences were performed at 7T (Magnetom, Siemens Healthcare, Erlangen, Germany) with a 32-channel receiver head coil with combined volume coil for transmission (Nova Medical, Wilmington, MA, USA). The CEST imaging parameters were: FOV: 256 × 256 mm2, matrix size: 128 × 128, voxel size: 2×2×8 mm3, GRE readout TR: 7.0 ms, TE: 2.04/4.08 ms, measurement TR: 8600 ms, with 22 unevenly distributed offsets from ±4.0 to ±2.6 ppm relative to water chemical shift and saturation train with three 100 ms long Gaussian pulses with 12 ms pauses between and B1rms of 3.0 µT.
Results
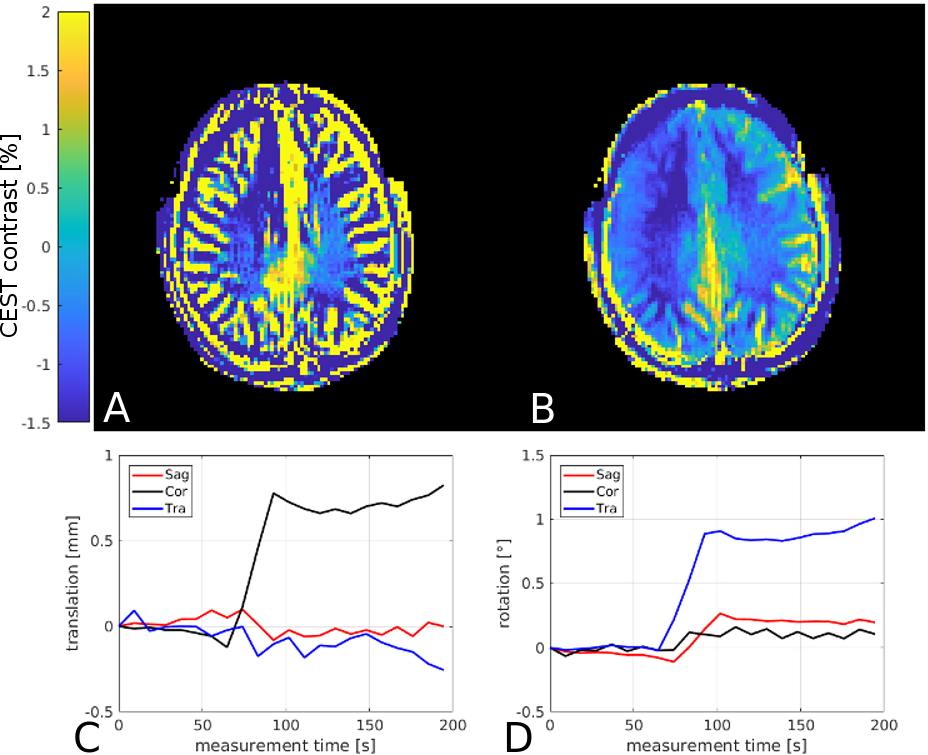
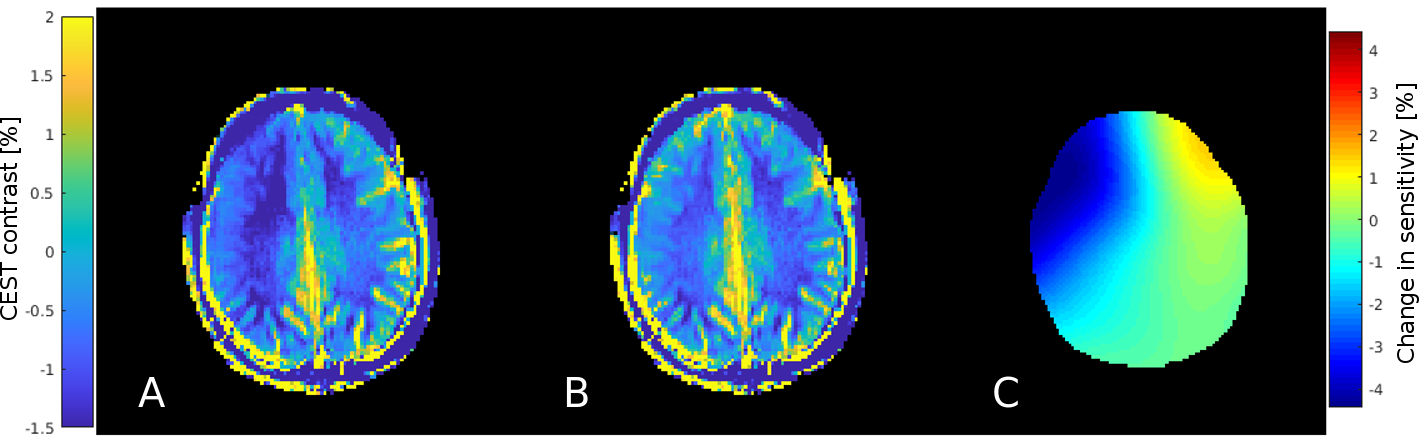
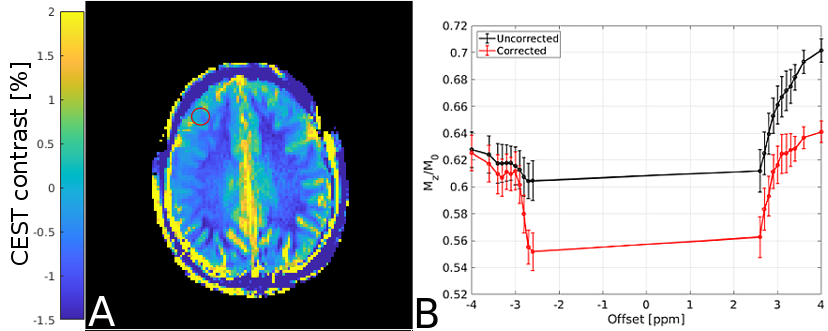
The navigator based motion correction method was able to correct head movements up to approximately 0.4 mm or 0.4° between two consecutive navigator sequences with respect to the first navigator image greatly reducing motion artifacts (Figure 2). Applying the retrospective receiver sensitivity correction improves Z-spectra quality (Figure 4) and further improves the CEST asymmetry maps (Figure 3). In the most severely affected regions CEST asymmetry changed by 1.0 ± 0.4 percentage points.Discussion
Navigator based real-time motion correction is able to reduce motion artifacts significantly as long as the patient movement is <0.4 mm or <0.4°. Larger singular movement resulted in imperfect motion correction within one coregistration step. Therefore, reacquiring the navigator images before the CEST acquisition was necessary to improve the motion correction. If the motion was too large for the motion correction to adequately compensate it in a single step, the subsequent CEST image had a different orientation compared to the rest. However, since the orientation was calculated with respect to the first navigator image, all subsequent CEST images were corrected, provided that excessive movement did not continue. Retrospective B1- receiver sensitivity correction decreased motion related artifacts further. Jointly, motion correction and good B1-/B1+ correction may be an efficient way to completely restore CEST data fidelity in the presence of involuntary head motionConclusion
Navigator based real-time motion correction and retrospective B1- sensitivity correction are viable methods to reduce motion related artifacts in CEST imaging. Together these methods facilitate CEST imaging in motion prone patient populations, such as elderly or pediatric patients.Acknowledgements
This study was supported by the Austrian National Bank grant #16133References
- Guivel-Scharen V, Sinnwell T, Wolff SD, Balaban RS. Detection of proton chemical exchange between metabolites and water in biological tissues. J Magn Reson. 1998;133:36–45.
- Hess AT, Andronesi OC, Tisdall MD, Sorensen AG, van der Kouwe AJ, Meintjes EM. Real-time motion and B0 correction for localized adiabatic selective refocusing (LASER) MRSI using echo planar imaging volumetric navigators. NMR Biomed 2012;25(2):347–358.
- Poblador Rodriguez E, Moser PA, Dymerska B, Trattnig S, Bogner W. Interleaved B0-mapping during dynamic Creatine-CEST for correction of temporarily fluctuating B0 inhomogeneities during plantar flexion exercise at 7T [abstract]. In: ISMRM 25th Annual Meeting & Exhibition; 2017 Apr 22–27; Honolulu, HI, USA. Abstract nr 3758.
- Windschuh J, Zaiss M, Meissner JE, Paech D, Radbruch A, Ladd ME, and Bachert P. Correction of B1-inhomogeneities for relaxation-compensated CEST imaging at 7 T. NMR Biomed., 2015;28: 529–537.
- Zhou J, Payen J-F, Wilson DA, Traystman RJ and van Zijl PCM. Using the amide proton signals of intracellular proteins and peptides to detect pH effects in MRI. Nature Med. 2003. 9 1085–90
Figures