0660
Real-time simultaneous shim and motion measurement and correction in CEST MRI using Double volumetric Navigators (DvNavs)1MRC/UCT Medical Imaging Research Unit, Division of Biomedical Engineering, Department of Human Biology, University of Cape Town, Cape Town, South Africa, 2Athinoula A. Martinos Center for Biomedical imaging/MGH, Charlestown, MA, United States, 3Department of Radiology, Harvard Medical School, Boston, MA, United States, 4Fetal Neonatal Neuroimaging and Developmental Science Center, Boston Children's Hospital, Boston, MA, United States, 5Cape Universities Body Imaging Centre (CUBIC-UCT), Cape Town, South Africa
Synopsis
In Chemical Exchange Saturation Transfer (CEST) MRI, images are acquired by applying saturation RF pulses at multiple frequencies of small increments to generate the CEST-spectrum. This makes CEST sensitive to motion and field inhomogeneity. Several factors can also vary the shim prepared by the scanner. To date, no study has been conducted to evaluate and correct shim fluctuation during CEST acquisition. In this study, we implement CEST with Double volumetric Navigators (DvNavs) to evaluate and update in real-time motion, zero and first-order shim parameters. The results show the ability of the DvNavs to correct shim and motion during CEST acquisition.
Introduction
Chemical Exchange Saturation Transfer (CEST) MRI allows indirect detection of molecules with small concentrations that cannot be detected using standard MRI. This is achieved by applying multiple spectrally-selective saturation pulses at the desired offset frequency of a specific chemical group present on a metabolite of interest, and measuring the reduction in water signal due to continuous saturation transfer. Since CEST is based on chemical shift, it is very sensitive to field inhomogeneity. Shim fluctuations due to subject respiration, heating induced in the shim iron by eddy currents, mechanical vibrations or subject motion will affect CEST measurements. CEST shim correction techniques are mostly based on post-processing of the data by retrospectively correcting the offsets in each voxel using either a pre-acquired B0 map1,2 or fitting the CEST-spectral data3, which require either phase mapping using a separate pulse sequence, or an additional step for image registration. The current work presents a method for real-time simultaneous measurement and correction of field inhomogeneity and motion in CEST MRI using double volumetric navigators.Methods
The CEST-EPI pulse sequence was modified to acquire a double 3D-EPI navigator4 before the acquisition of each frequency-offset image. Each navigator was excited with a very small flip angle (2º) to minimize the impact of signal saturation. A 3D field-map was reconstructed on-line and the zero- (ΔF) and first-order shims (linear gradients Gx, Gy and Gz) computed. The reconstructed 3D field-map from the navigator was mapped to the CEST FOV and the corresponding shim parameters for CEST calculated. The offset of the x, y, and z shim gradient currents were then applied simultaneously in real time and the ΔF correction was implemented by recalculating the frequency and the phase of all RF pulses as well as the ADC pulses for both the navigator and the CEST measurement. Prospective Acquisition CorrEction (PACE) for motion was implemented using the first of each navigator pair (vNav). Phantom and in vivo tests were performed on a 3T Siemens Skyra using the 32-channel head coil. First, the central frequency and linear gradients were manually manipulated on a water phantom to test the ability of the proposed method to detect and accurately measure these changes. Next, a single axial slice was acquired in the middle of the brain in each of four healthy volunteers using (1) standard CEST without motion (NoMo), (2) DvNav-CEST with motion and no correction (Mo-NoCo), (3) DvNav-CEST with motion and motion correction only (Mo-MoCo), and (4) DvNav-CEST with motion and shim and motion correction (Mo-AllCo). Subjects were instructed to move at certain times during the acquisitions with motion (Mo). For all acquisitions, navigator parameters were: TR 13ms, TE1/TE2 4.8ms/7.2ms, voxel size 8×8×8mm3, bandwidth 4882 Hz/px. CEST parameters were: TR 2000ms including the navigator time, TE 21ms, 5mm slice thickness, 43 frequency offsets (-5 to 5 ppm; step-size 0.25 ppm), rectangular RF pulse duration 500ms and 1µT amplitude. Matlab was used to process the images and generate CEST-curves.Results
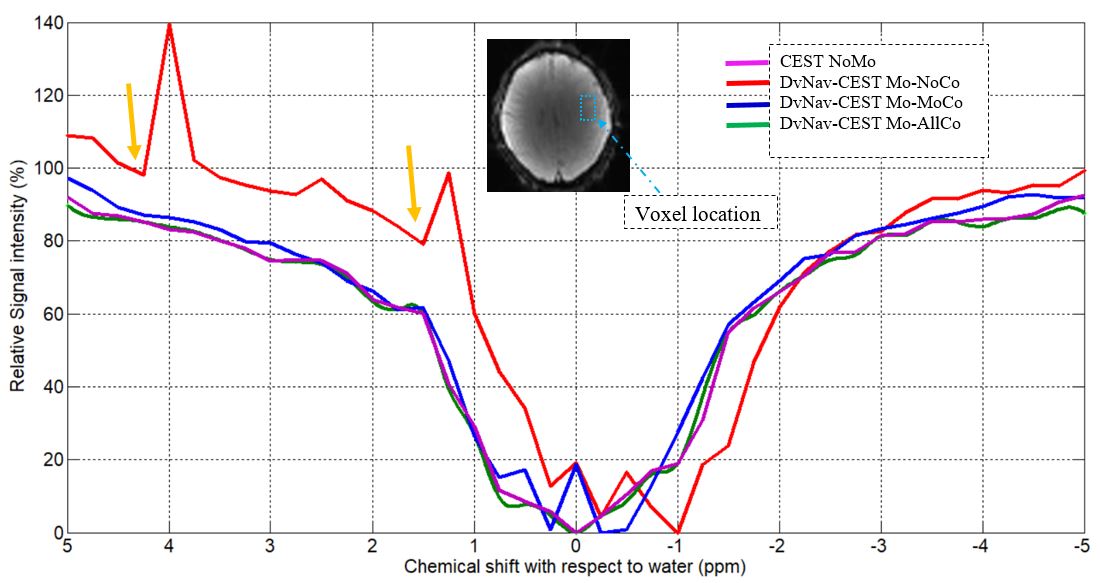
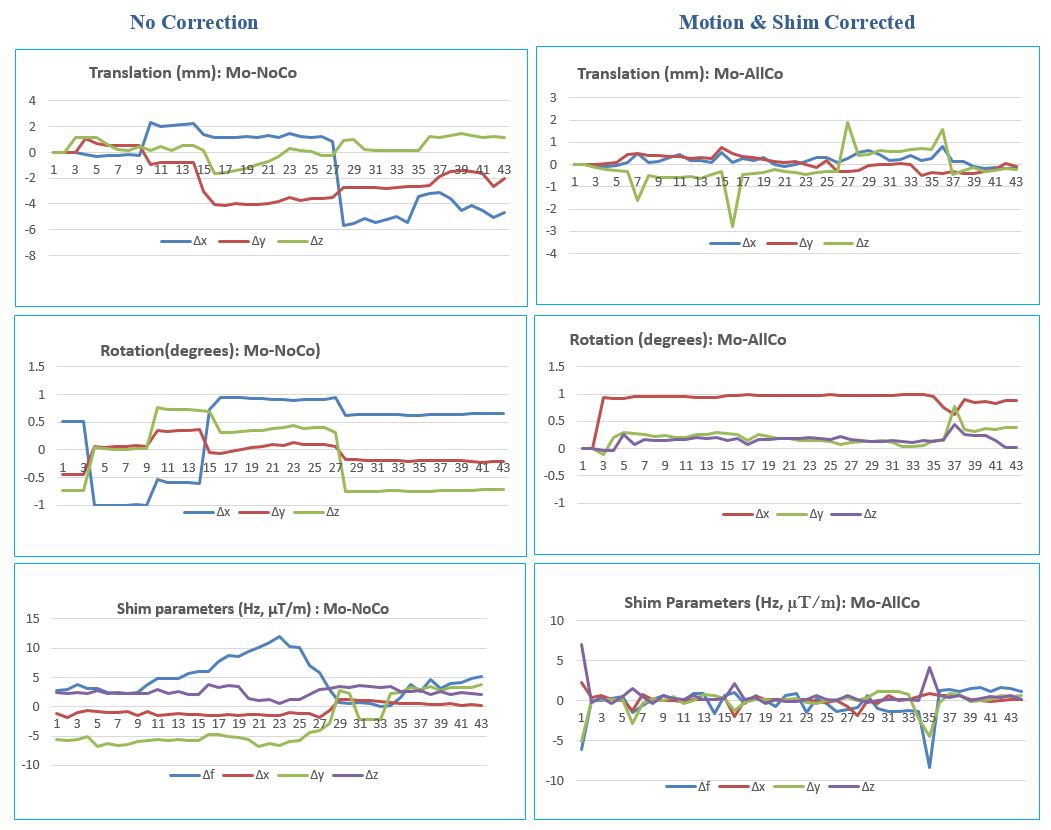
Figures 1&2 show respectively the zero- and first-order shims estimated by the DvNav-CEST sequence after manual manipulation. Figure 3 shows the image distortion due to manual adjustment of the system frequency (A) and linear gradients (B) and the ability of the DvNav sequence to correct these distortions (C). Figure 4 shows for a single subject CEST curves from the CEST NoMo, and DvNav-CEST Mo-NoCo, Mo-MoCo and Mo-AllCo acquisitions. The results for other subjects were similar. Figure 5 shows the shim and motion parameters estimated by the DvNav when no correction is applied (left), and how the image FOV and shim parameters are adjusted in real time when motion and shim correction is performed (right).Discussion
The DvNav-CEST sequence accurately estimates the frequency and linear gradient changes (Figures 1&2) and corrects resulting image distortions (Figure 3). In addition to introducing field inhomogeneity, which shifts the offset frequencies, motion causes distortions in the CEST curve resembling saturation transfer effects (yellow arrows in Figure 4). The DvNav-CEST sequence accurately measures motion and shim changes occurring between successive frequency-offset images (Fig 5) and yields improved CEST spectra (Fig 4).Conclusion
The proposed technique allows for real-time simultaneous shim and motion correction during acquisition of CEST frequency-offset images with no additional scanning time. This allows accurate CEST data analysis even in the presence of motion and field variation, effects that cannot be corrected using post- processing techniques alone.Acknowledgements
The National Research Foundation of South Africa (NRF) Thuthuka grant TTK 150612119380 and the National Institute of Health (NIH) grants R01HD071664 and R01HD085813.References
- Kim M, Gillen J, Landman BA, Zhou J, and van Zijl PC. Water saturation shift referencing (WASSR) for chemical saturation transfer (CEST) experiments. Magnetic resonance in Medicine, 2009; 61(6): 1441-1450.
- Phillip Zhe Sun*, Christian T. Farrar, and A. Gregory Sorensen, Simultaneous Mapping of Water Shift and B1 (WASABI)—Application to Field-Inhomogeneity Correction of CEST MRI Data, Magnetic Resonance in Medicine 58:1207–1215 (2007).
- Morrison C and Henkelman RM. A model for magnetization transfer in tissues. Magnetic resonance in Medicine, 1995; 33(4): 475-482
- Hess AT, Tisdall MD, Andronesi OC, Meintjes EM, van der Kouwe AJW. Real-time Motion and B0 corrected single voxel spectroscopy using volumetric navigators. Magnetic resonance in medicine: official journal of the Society of Magnetic Resonance in Medicine / Society of Magnetic Resonance in Medicine. 2011;66(2):314-323. doi:10.1002/mrm.22805.
Figures
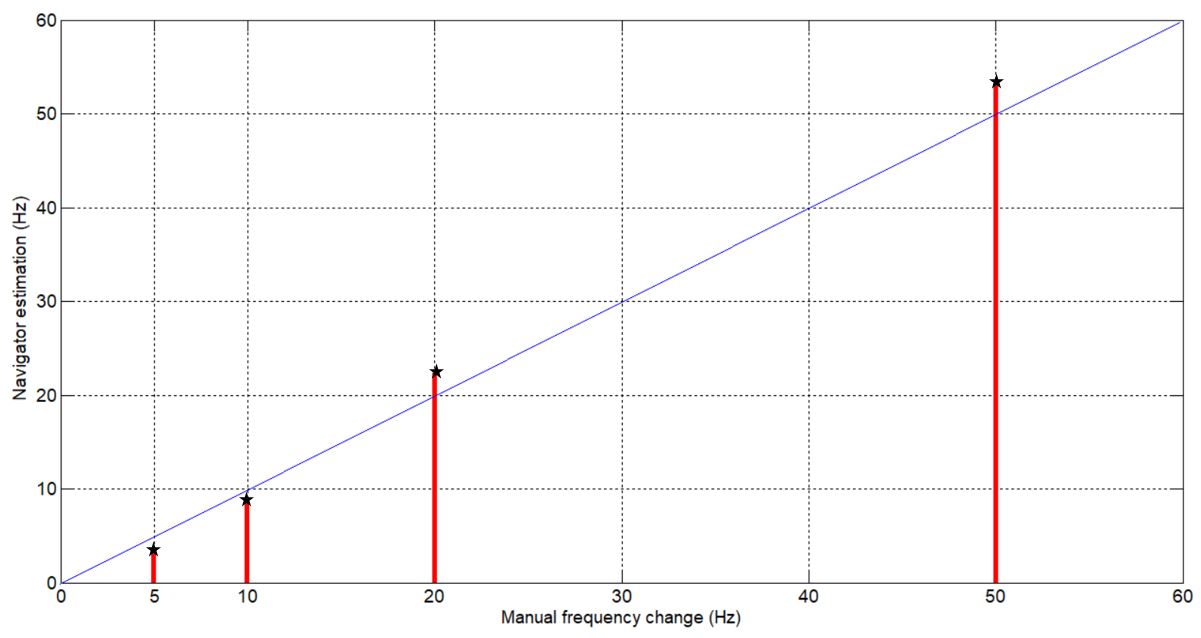
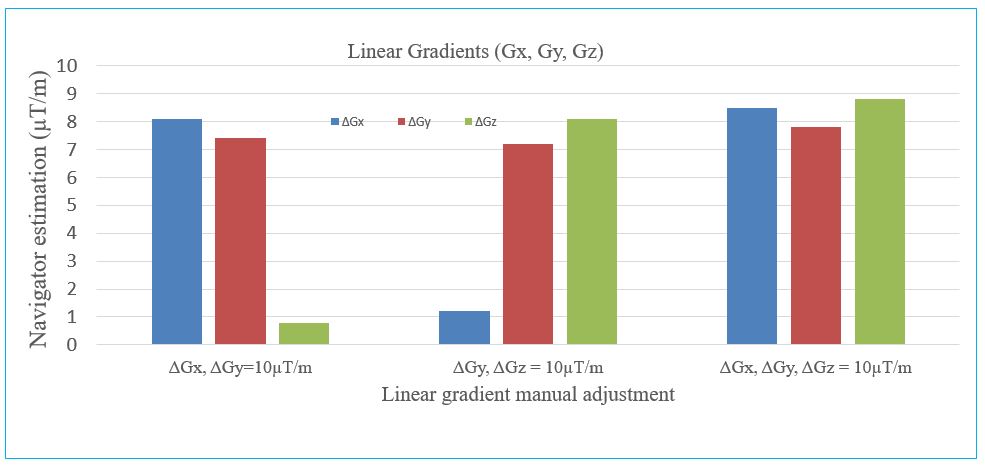
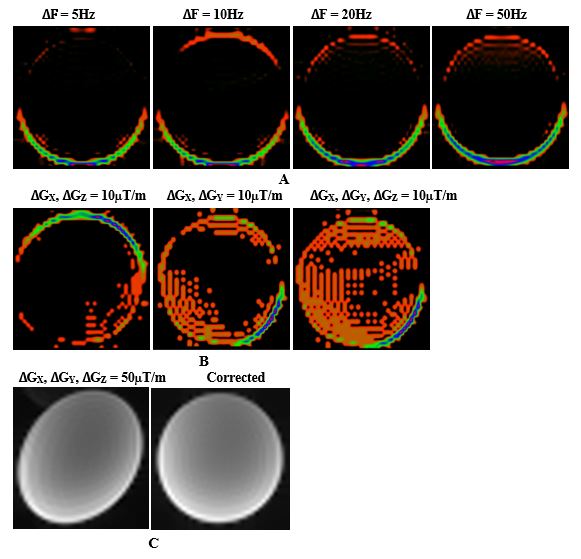
Figure 3: Signal intensity differences between water phantom images acquired before and after manual adjustments of (A) frequency and (B) linear gradients. (C) shows a sample image acquired after manipulation of linear gradients (Gx, Gy, and Gz) by 50 μT/m both without (left) and with (right) motion and shim correction applied.