5547
Simultaneous MR imaging and control of an MR compatible afterloader: feasibility of real-time HDR brachytherapy source tracking1Department of Radiotherapy, UMC Utrecht, Utrecht, Netherlands, 2Elekta NL, Veenendaal, Netherlands, 3Image Sciences Institute, UMC Utrecht, Utrecht, Netherlands
Synopsis
For MR-guided high-dose-rate (HDR) brachytherapy, an MR-compatible afterloader was developed, required for real-time HDR brachytherapy source tracking. This afterloader should be able to function well close to the MRI scanner. The functioning of both the MR-compatible afterloader and the MRI scanner, while operating simultaneously, was investigated. Source localization was performed by a phase-only cross correlation localization method. The results demonstrate that the afterloader was able to send the source to predefined source positions, while simultaneously performing MR imaging. Combined with high-temporal resolution imaging and fast reconstruction/post-processing, this study shows the feasibility of real-time source tracking for MR-guided HDR brachytherapy.
Introduction
In high-dose-rate (HDR) brachytherapy, image guidance is crucial for accurate and safe dose delivery. Accordingly, MR-guided HDR brachytherapy is in development at our institution, defining the need for an MR-compatible afterloader. An afterloader sends the radioactive source remotely to planned positions (dwell positions) within a catheter, inserted into the tumor tissue, to irradiate during a planned time. Currently, no verification is performed during the treatment. Real-time MRI guidance can highly improve the treatment safety and accuracy, also providing the possibility of treatment verification. However, this involves positioning of the afterloader near the patient, and thus near the MR bore. Consequently, the metallic materials and the electronics in the afterloader can disturb the magnetic field and the imaging process of the MRI scanner. Vice versa, MR imaging can affect the functioning of the afterloader. This study describes the testing of a recently developed MR-compatible afterloader, operating simultaneously with MR imaging, to investigate the feasibility of real-time source tracking for MR-guided HDR brachytherapy.Methods
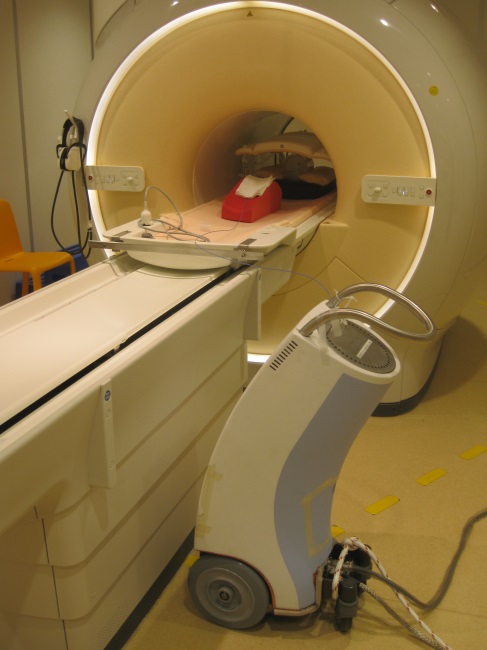
Experimental set-up: A prototype of an MR-compatible afterloader (Flexitron, Elekta) was developed. This afterloader was made MR-compatible by providing every part as well as the cover with RF shielding. The source cable was replaced by a plastic cable containing a piece of steel at its tip, serving as a dummy source. The afterloader was placed at 2.1 m distance from the isocenter, just outside of the 20 mT line (due to the presence of electromagnetic switches inside the afterloader, a field strength of 30mT is the maximum limit for a good performance). The afterloader was connected to a catheter positioned in an Agar phantom (doped with MnCl2), see Fig. 1.
Afterloader management: The afterloader was programmed to remotely send the source (I) to 10 source positions, with a 10 mm step size, remaining 10 s at each position, and (II) to 20 source positions, with a 5 mm step size, remaining 0.5 s at each position.
MRI acquisition: While sending the source to its predefined positions, MR imaging was carried out on a 1.5 T MR scanner (Ingenia, Philips) using a 2D spoiled gradient echo sequence (TR/TE 2.2/1.0 ms, slice thickness 10 mm, FOV 192x192 mm, acq. matrix 96x96, flip angle 30°, SENSE=2), scanning two orthogonal slices interleaved with a temporal resolution of 114 ms per image.
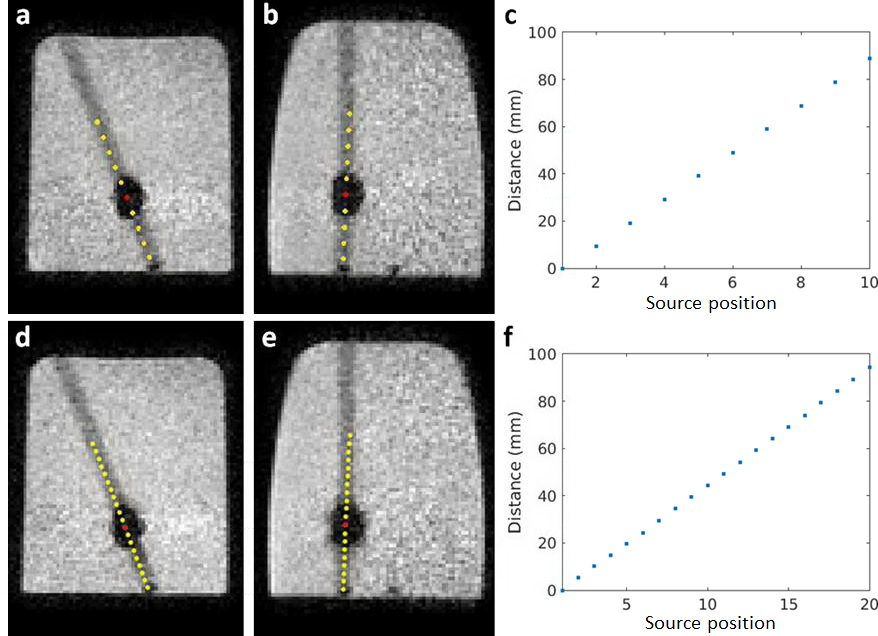
HDR source localization: The MR artifact induced by the magnetic susceptibility of the metallic source was exploited. The artifacts (complex data) were simulated based on the susceptibility induced B0 field disturbance [1], taking into account the source orientation with respect to the B0 field direction as well as the orientations of the 2D slices. The localization was executed offline in a post processing operation by phase-only cross correlation [1, 2], to find the translation between the experimental MR image and the simulated artifact. The 3D coordinates of the individual source positions were determined from the two orthogonal slices, and the Euclidean distances with respect to the first position were calculated.
Results and discussion
The experiments demonstrated that the prototype MR-compatible afterloader and the MRI scanner fully functioned while operating simultaneously, without influencing each other. The afterloader was able to send the source to the predefined dwell positions when placed next to the MRI scanner, without being attracted to or being disturbed by the scanner. The HDR source positions could be determined by the described localization method (now accomplished offline), see Fig. 2. The average distances between the determined 3D source positions for cases (I) and (II) were 9.9±0.2 mm and 5.0±0.2 mm, respectively. These distances correspond with the step sizes programmed for the afterloader. The high temporal resolution (~190 ms for a realistic FOV) and the low latency (~200 ms expected from the short reconstruction/post-processing time) show the feasibility of HDR source tracking in real time. However, for now, the post-processing was carried out in an offline operation, since the software to complete the real-time loop with online post-processing and feedback to the scanner is currently being implemented. Experiments are scheduled for the near future to bring this real-time loop into practice.Conclusion
The MR-compatible afterloader developed in this study and a 1.5 T MRI scanner were demonstrated to fully function while operating simultaneously, enabling real-time HDR source position verification, using a phase-only cross correlation localization method. Accordingly, this study demonstrates the feasibility of real-time MRI guidance for MR-guided HDR brachytherapy.Acknowledgements
This research was funded by the Eurostars Programme, ITEA3, project name: System of Real-Time Systems (SoRTS), project number: 12026.References
1. Beld E. et al. Automatic high temporal and spatial resolution position verification of an HDR brachytherapy source using subpixel localization and SENSE. Proc. Intl. Mag. Reson. Med. 24. 2016; #3585.
2. Kuglin C.D. et al. The phase correlation image alignment method. IEEE Trans Cybern. 1975; 163-165.
Figures