5436
A Three-dimensional Target Tracking Technique for MRgHIFU using an Image Matching Method with Liver Deformation Volumes Obtained via Time-Resolved Volume Acquisitions1Information Science and Technology Center, Kobe University, Kobe, Japan, 2Graduate School of System Informatics, Kobe University, Kobe, Japan, 3Graduate School of Engineering, Tokai University, Hiratsuka, Japan, 4Center for Frontier Medical Engineering, Chiba University, Chiba, Japan
Synopsis
MRgHIFU treatment for liver requires a tracking technique to “lock on” to the focal spot at the target tissue region during respiratory-induced motion for targeting and temperature imaging. Here, we proposed a target tracking technique using template matching methods. A pre-operative, multi-slice sagittal image series under natural slow breathing was acquired, and a database, including a three-dimensional translation and deformation behavior of the liver and the target, was constructed. Intra-operative target tracking was performed by acquiring a single sagittal slice. The experimental results were demonstrated the feasibility of the three-dimensional target tracking technique using a template matching methods.
Purpose
MRgHIFU treatment of a liver requires a tracking technique to “lock on” to the focal spot at the target tissue region during respiratory-induced motion for targeting and temperature imaging. A two-dimensional vessel-tracking-based targeting technique on cross-sectional images has been proposed[1]. However, three-dimensional (3D) translation and deformation of the tissue should be considered because translation and deformation of the liver organ caused by respiratory motion leads to 3D displacement of the estimated target position. In this study, we proposed a 3D target tracking method using an image matching technique with liver deformation volumes obtained via time-resolved volume acquisitions.Materials and Methods
MR data acquisition
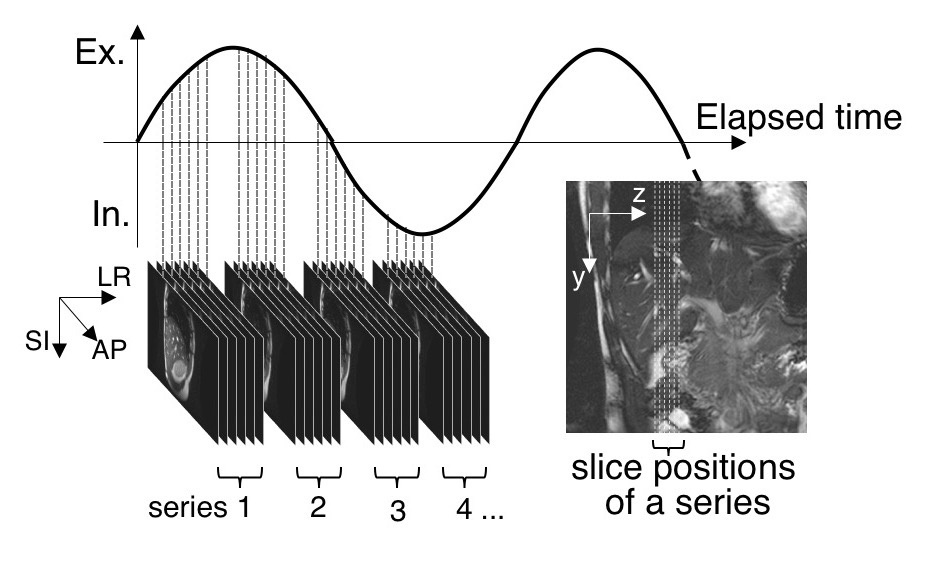
A 42-image series, which included 6 interleaved sagittal images from a healthy volunteer ’s liver, was acquired by a 3.0T MRI with steady-state free precession (SSFP) under natural slow breathing and a single coronal slice was acquired under breath holding (Figure 1). Imaging conditions were follows: TR/TE, 4.85ms/1.98ms; FA, 90 degrees; slice thickness, 5mm; FOV, 350x350mm2; acquisition matrix, 256x256; parallel factor, 2.0. In this study, a 32-image series was used for pre-operative analysis, and an intra-operative 12-image series was used for tracking.
Pre-operative task: Create a database of 3D behavior
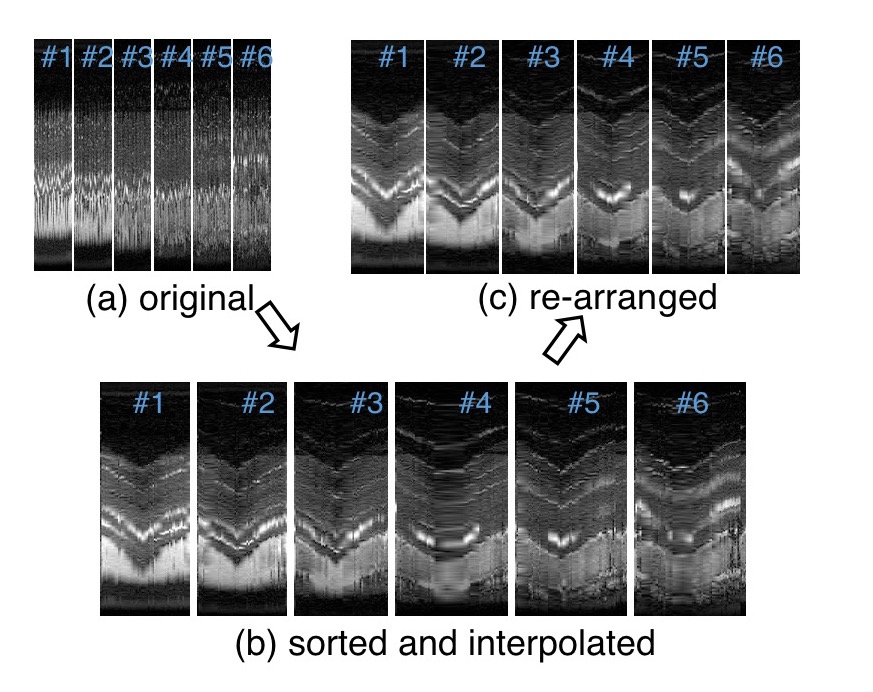
(1) Reconstruct a 3D image series: First, the diaphragm positions of each image were extracted with the 3D template matching method[2]. Template patterns were set in the area that includes the diaphragm in the first image series. The sum of the absolute difference (SAD) was used for the similarity index between the template and the input pattern. Next, each image series was classified into four categories (inhalation, maximal inhalation, exhalation, and maximal exhalation), depending on relative displacement, with the diaphragm position of the coronal slice as a reference image. The images of each slice position were sorted in respiratory order. The sorted images were interpolated in the direction of the respiration cycle and assembled into image sets in such a way that the diaphragm positions fit to the diaphragm line of the coronal image. Each assembled image set was rearranged toward the isotropic voxel images via a linear interpolation method.
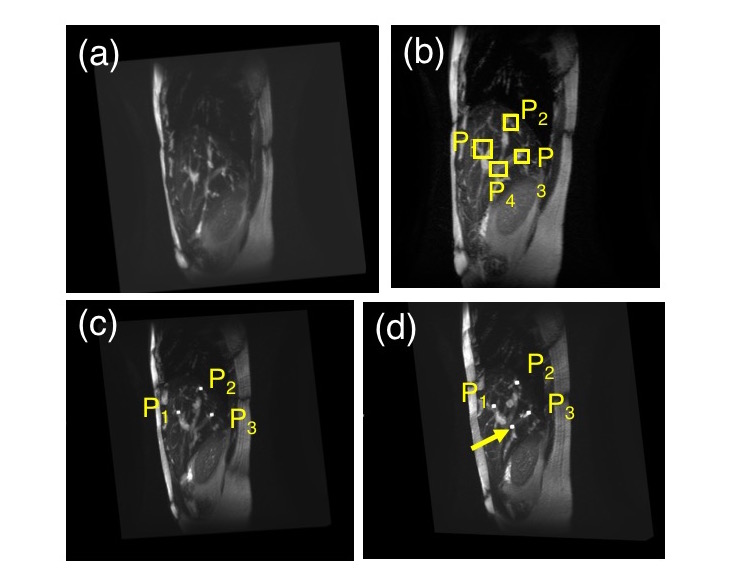
(2) Vessel branch extraction[3]: At least three regions of interest (ROI), including branching points (P1-P3), were set in the first isotropic voxel space. The branching points and target point should be a convex closure. The branching points of the other image sequences were estimated using the 3D template matching method.
(3) Pre-operative target tracking: 3D target tracking was performed using 2D projections of the 3D branching position, which was based on three branch points while maintaining relative angles and distance among the vessels[1]. Slice positions of the SI-direction were also calculated with relative distance among the vessels. In this study, the target point was set on the branch point (P4) for validation of the proposed methods.
Intra-operative task: Target tracking
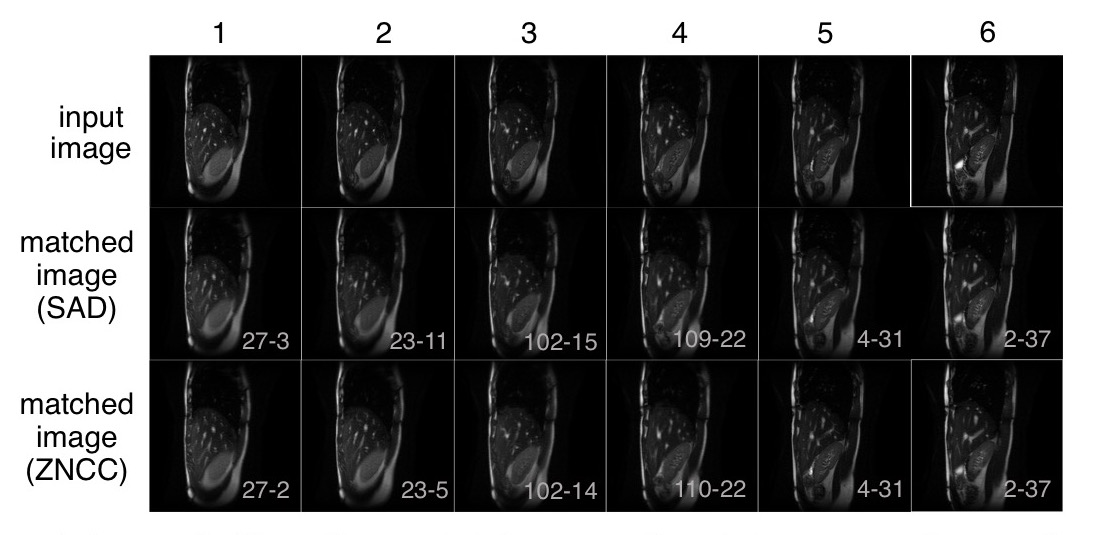
For this experiment, 6 slices of a 12-image series were used as intra-operative images. Target tracking was performed via 3D template matching. The template pattern was set in the area that includes the liver in the first intra-operative image. Smoothing filters (3x3 box filter, median filter) were used to crop images for noise-reduction. SAD and zero-mean normalized cross-correlation (ZNCC) were used as the evaluative value for comparison. The target positon of the extracted series was estimated as the target position at the time the intra-operative image’s acquisition.
Results and Discussion
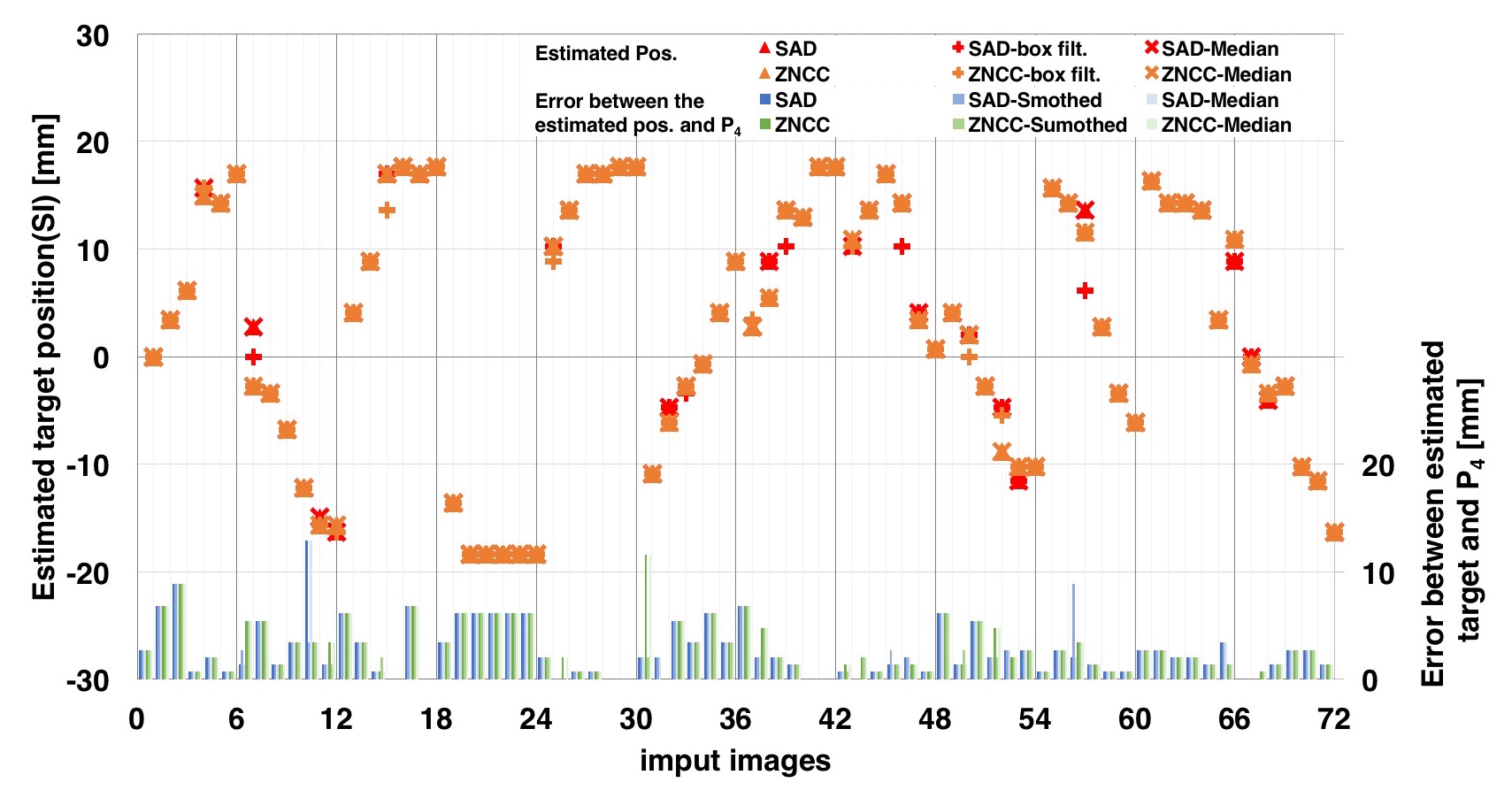
Figures 3(c) and 3(d) show the estimated branching points in the re-arranged isotropic voxel images. Estimations of branching vessel positions in each frame were performed in quasi-real time under 600ms. Using at least three branch points(P1-P3), a pre-operative target position was determined, and estimation of displacement in 3D was obtained. Average values of the gaps between the target position and the estimated positions of the AP, SI, and LR directions were 2.0mm, 2.8mm, and 2.4mm, respectively. Figure 4 shows the experimental results of the intra-operative target tracking. 12 intra-operative images were matched to pre-operative images using both SAD and ZNCC. Figure 5 shows the estimated target position of each input image. Smoothing was not effective for template matching in this study. The matching process was performed at 92ms (SAD), 247ms(ZNCC) per image.Conclusion
The feasibility of the proposed method for tracking the target position with reconstructed 3D MR volumes was demonstrated. The execution time for targeting was the sum of the scan time to acquire a single slice and the run time for the template matching. Notably, tracking time delays should be considered, and volunteer studies with quicker acquisition and calculations for the proposed method are necessary for clinical translation.Acknowledgements
No acknowledgement found.References
1) Kokuryo D, Kumamoto, et al. Evaluation of a vessel-tracking-based technique for dynamic targeting in human liver. Magn Reson Med. 2012 ;67(1):156-63.
2) Kumamoto E, Matsumoto T, et al. Four-dimensional Reconstruction of Abdominal MR Images for Target Tracking Based on Respiration-induced Liver Transformation and Deformation for MR-guided Focused Ultrasound Surgery, JJME.2015;53(3):168-178.
3) Matsumoto T, Kumamoto E, Kokuryo D, Kuroda K, Respiratory-induced Deformation Analysis of Liver using Branching Structure of Portal Vein for MR Images for HIFU, Proc of 10th iMRI Sympo. 2014;94.
Figures