4014
Variable-blipped-EPI (VB-EPI) for Lower Acoustic Noise and Higher Efficiency with non-Cartesian iterative Reconstruction1University of Erlangen-Nuremberg, Erlangen, Germany, 2Siemens Healthcare GmbH, 3Fraunhofer MEVIS
Synopsis
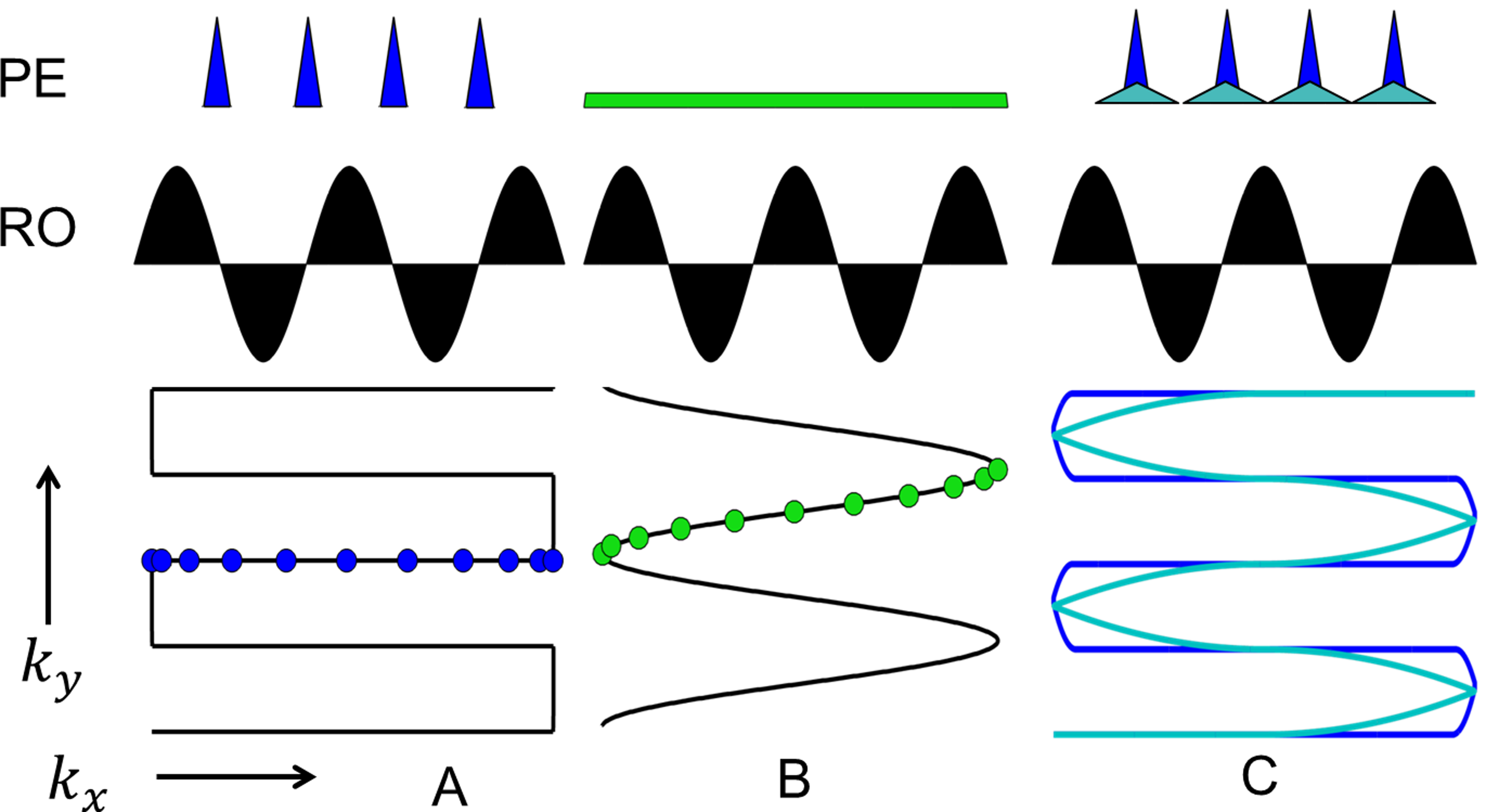
Echo-Planar-Imaging1 (EPI) with trapezoidal Readout (RO) and blipped Phase-Encoding (PE) gradients gives a high level of acoustic noise2. To reduce acoustic noise we suggest prolonging the duration of the blipped PE gradient in combination with a sinusoidal or trapezoidal RO gradient and continuous data sampling throughout the whole RO train. This results in a variable density sampling along PE (less dense at the edges, denser in the centre of k-space) with a non-Cartesian trajectory, where we use ESPIRiT3 to reconstruct the data. The efficiency is improved due to continuous data sampling, resulting also in a reduced echo time.
Purpose:
In standard Echo-Planar Imaging (EPI) a trapezoidal Readout (RO) gradient is combined with a blipped Phase-Encoding (PE) gradient. During the blips no data are acquired, resulting in a lower efficiency. Furthermore, this sampling scheme comes with a high level of acoustic noise2. The current gold standard in reducing acoustic noise is using a sinusoidal RO gradient with a constant PE gradient (constant PE-EPI)4. This has beneficial effects on fMRI studies5. Data can be acquired throughout the whole RO train except for the edges of k-space (about 5 %) resulting in a higher efficiency compared to blipped PE gradient. This EPI acquisition results in a non-Cartesian trajectory (compare Fig.1). It would be necessary to use non-Cartesian parallel imaging methods for accelerated acquisitions. It was shown that a variable density trajectory is beneficial for non-Cartesian parallel imaging6. We optimize the trajectory to be less dense sampled in PE direction at the edges of k-space, while it is oversampled in PE direction in the centre of k-space. This method is named Variable-Blipped EPI (VB-EPI).Method:
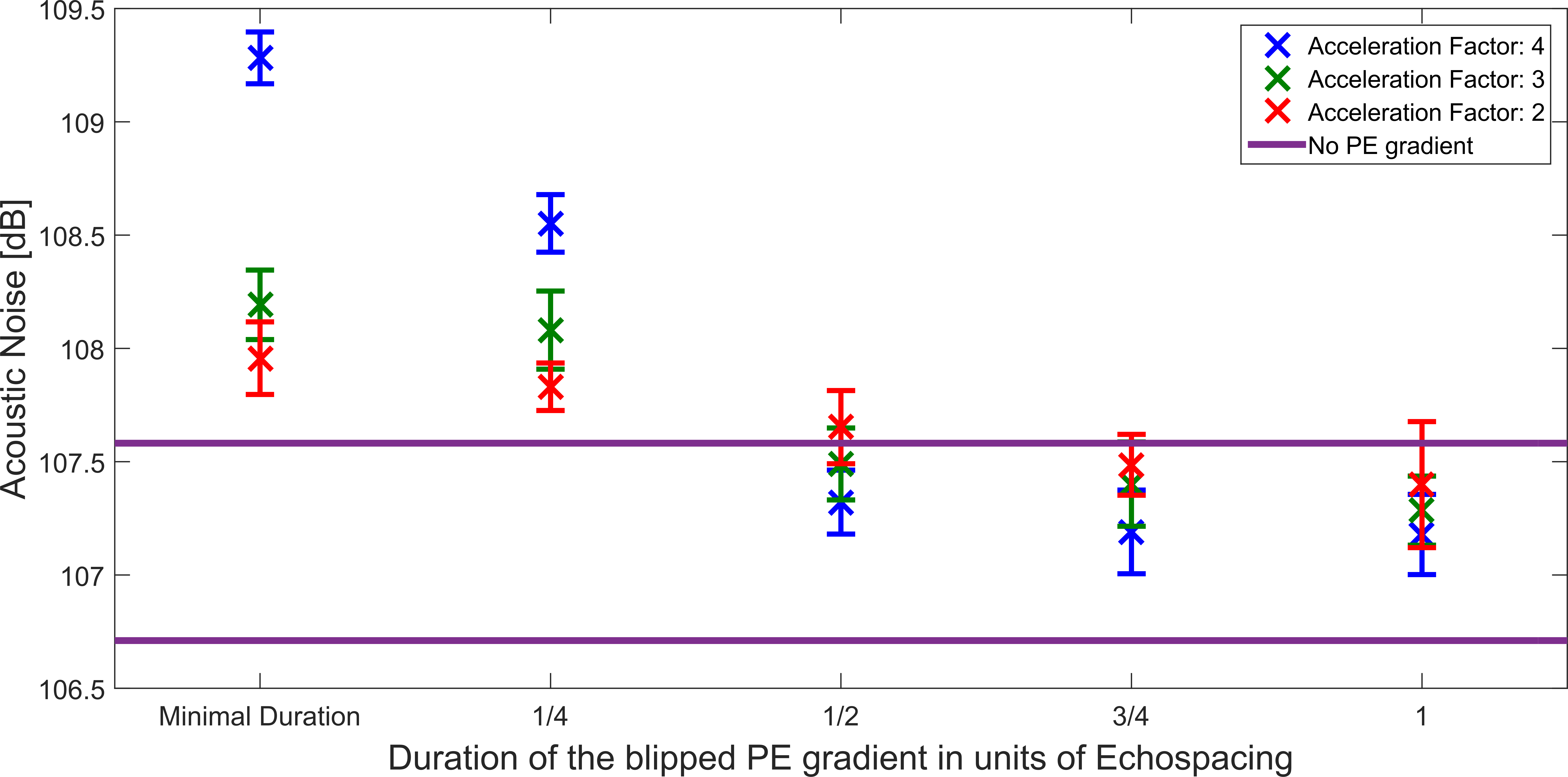
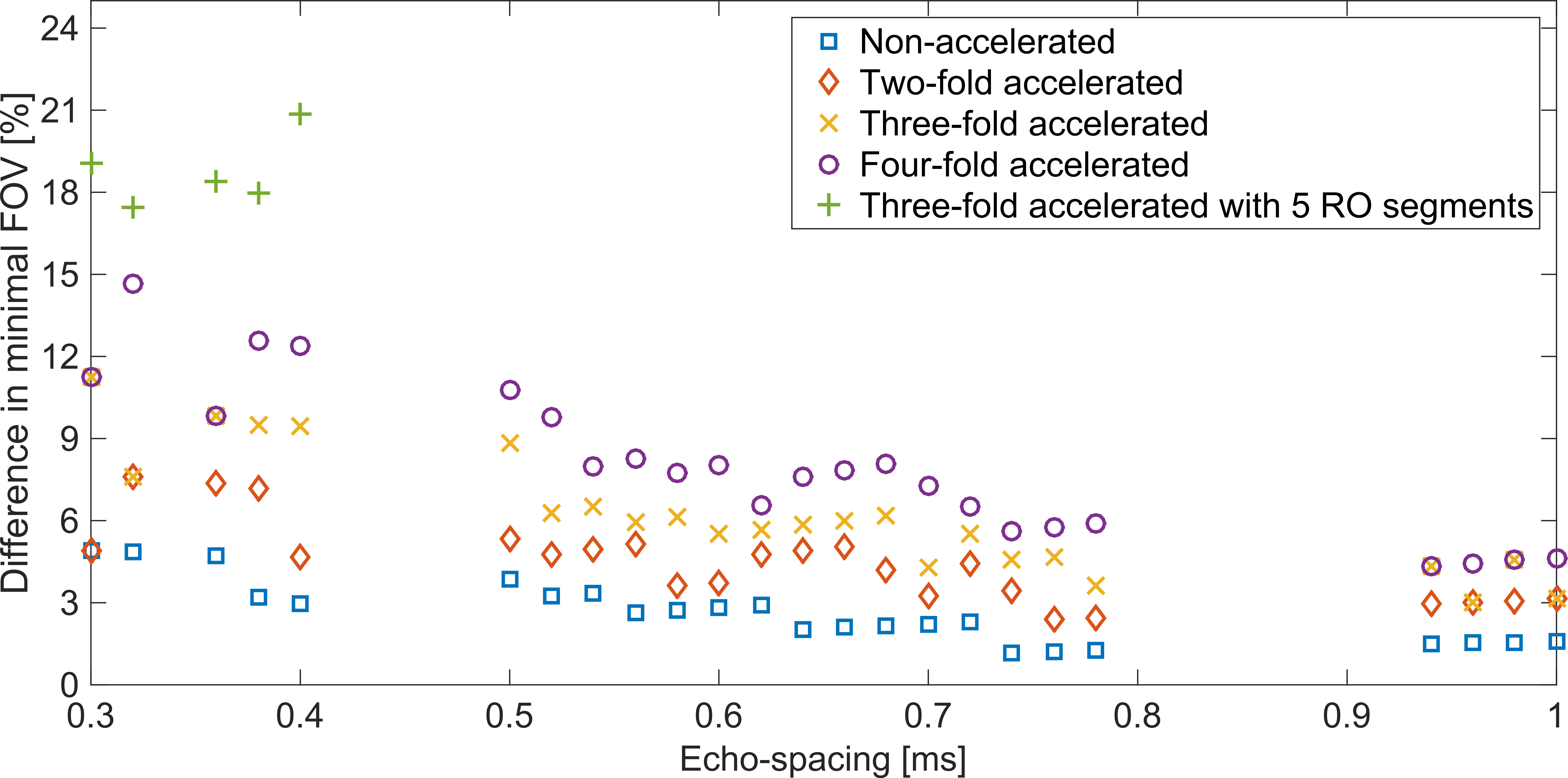
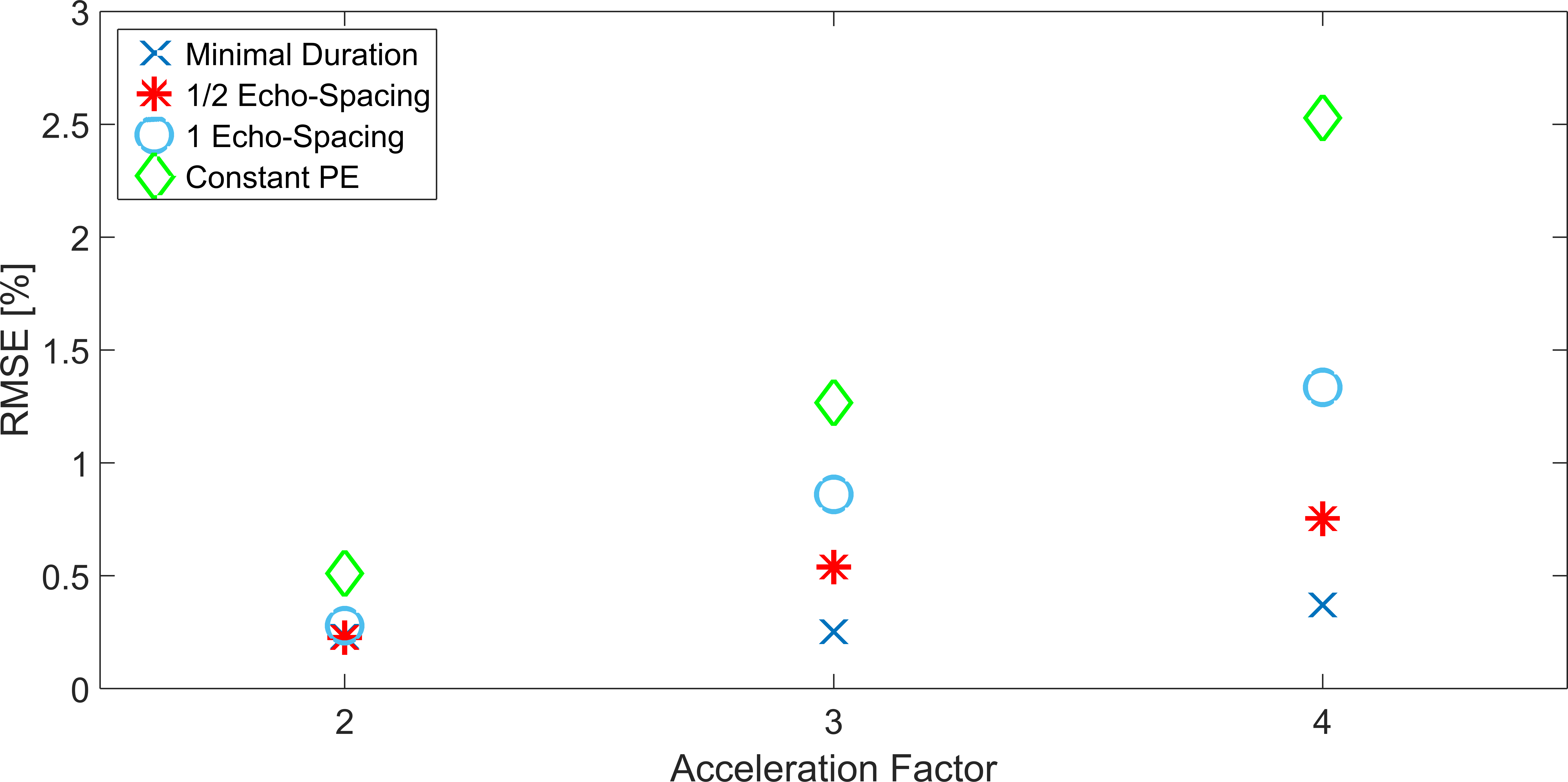
To achieve the above proposed trajectory, we suggest to prolong the duration of the blipped PE gradients. This results in a lower amplitude and slew rate of the PE gradient blips. As a consequence, the acoustic noise is reduced (see Fig. 2). In our method, data can be sampled during the complete RO train. We compare our method for different blip durations against constant PE-EPI with sinusoidal RO gradient. Simulations have been performed in IDEA (Siemens sequence development environment) to investigate the efficiency gain (see Fig. 3). The gain in efficiency is determined by comparing the smallest possible FOV for VB-EPI and blipped EPI. This is given here in % difference of the smallest possible FOV relative to blipped EPI sampling for different echo-spacings and with different acceleration factors. For continuous data acquisition throughout the whole RO-train, the trajectory in k-space will not be Cartesian anymore (compare Fig. 1). Consequently, the data is reconstructed by using non-Cartesian parallel imaging methods like ESPIRiT3. We hereby used the BART Reconstruction toolbox7. To assess the image reconstruction quality, the Root-Mean-Square-Error (RMSE) of our VB-EPI sequence and in addition a constant PE-EPI against a blipped EPI was determined in Matlab (Mathworks, Nattick, USA). This was done for different blip durations and acceleration factors (compare Fig. 4). All measurements were performed with a prototype VB-EPI sequence on a standard 3T Skyra XQ system with a 20 channel Head-Neck Coil (Siemens Healthcare, Erlangen, Germany) whereby only the 16 head elements were used.Results:
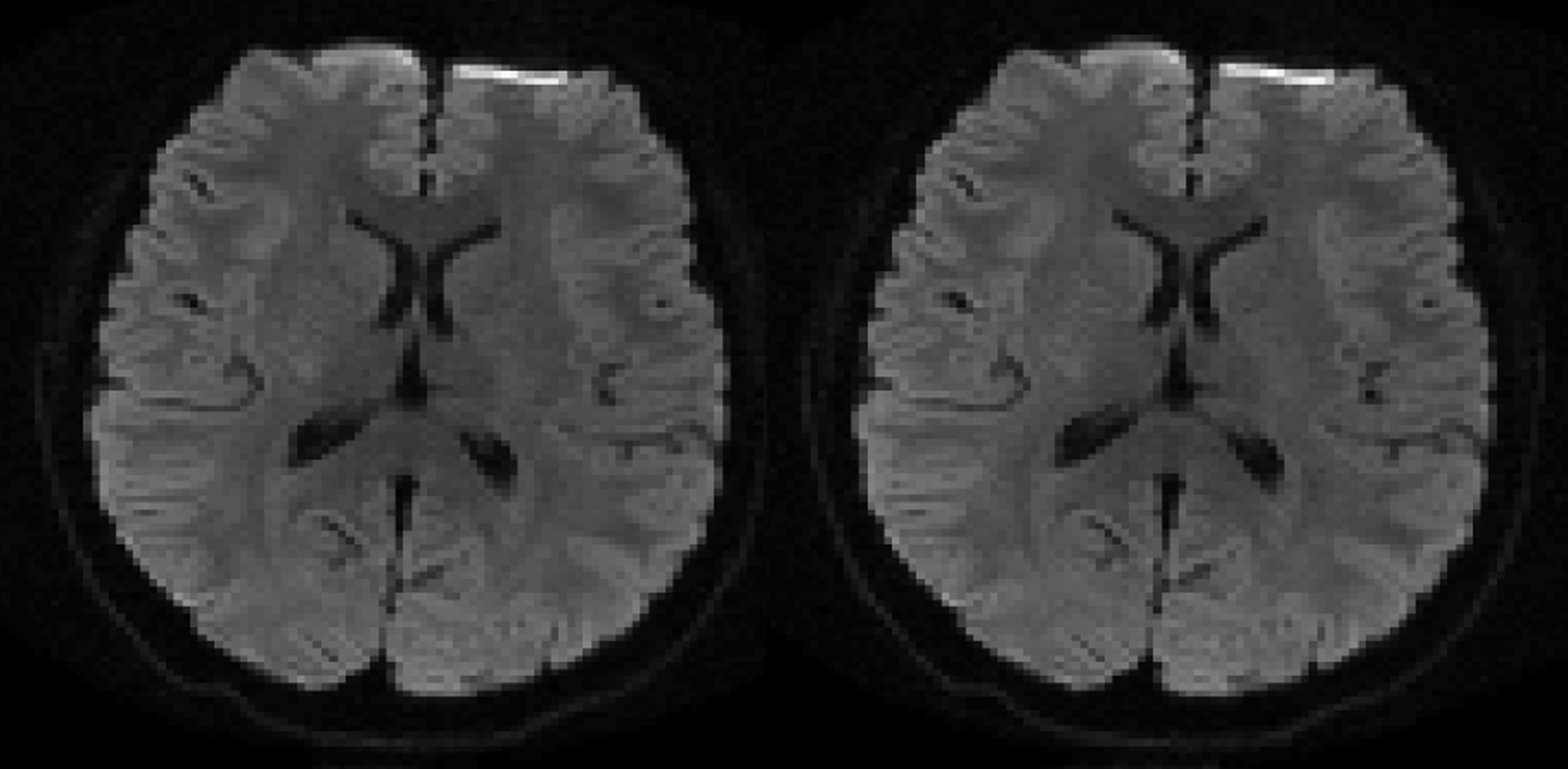
Obviously, the acoustic noise (see Fig. 2) decreases with increased blip duration. For blip durations of about ½ echo-spacing, the acoustic noise level is in the range of constant PE-EPI. On the other hand, the reconstruction quality decreases with increasing blip duration and acceleration factor (compare Fig. 4). However, the RMSE error is much lower for VB-EPI compared to constant PE EPI. It can be seen in Fig. 3 that the gain in efficiency increases for lower echo-pacing, higher acceleration factor and for RO segmentation8. In Fig. 5 sinusoidal blipped-EPI is compared to our VB-EPI sequence for a blip duration of ½ echo-spacing.Discussion:
For the VB-EPI sequence there is a compromise to be made between extending the duration of the blip to reduce acoustic noise and the level of image quality, which deteriorates with increasing blip duration. As seen from the results in Figs. 2 and 4, a good compromise can be reached by using a blip duration equal to half the echo spacing. This provides a sampling scheme with the low acoustic noise properties of constant PE-EPI and the high image quality of blipped-PE EPI. Indeed, as shown in Fig. 5, this sampling scheme results in an image quality that is visually comparable to that of blipped-PE EPI. The higher sampling efficiency benefits at short echo spacing make the VB-EPI sampling scheme particularly well suited to RO-segmented-EPI, which uses a substantially shorter echo spacing than that of single-shot EPI.Conclusion:
We have shown that the new method VB-EPI successfully reduces acoustic noise in EPI with minimal loss in image quality. This is of high importance for fMRI studies. The combination of non-Cartesian parallel imaging strategies, such as ESPIRiT, and variable density acquisitions is beneficial for higher acceleration factors. Especially in this regime, the gain in efficiency and the reduction of acoustic noise is most pronounced. Currently we are implementing this approach in 3D-EPI/SMS-imaging, conducting fMRI studies and acquiring RO-segmented diffusion data.Acknowledgements
No acknowledgement found.References
1. Mansfield P. Multi-planar image formation using NMR spin echoes. J. Phys. C: Solid State Phys. 1977;10(3):L55
2. Ravicz ME, Melcher JR, Kiang NYS, Acoustic noise during functional magnetic resonance imaging. The Journal of the Acoustical Society of America, 2000;108(4):1683-1696.
3. Uecker M, Lai P, Murphy MJ, Virtue P, Elad M, Pauly JM, Vasanawala SS, Lustig M. ESPIRiT--an eigenvalue approach to autocalibrating parallel MRI: where SENSE meets GRAPPA. Magn Reson Med. 2014;71(3):990-1001
4. Schmitter S, Diesch E, Amann M, Kroll A, Moayer M, Schad LR. Silent echo-planar imaging for auditory FMRI. Magma, 2008;21(5):317-25.
5. Peelle JE, Eason RJ, Schmitter S, Schwarzbauer C, Davis MH. Evaluating an acoustically quiet EPI sequence for use in fMRI studies of speech and auditory processing. Neuroimage. 2010;52(4):1419-9.
6. Heidemann RM, Griswold MA, Seiberlich N, Nittka M, Kannengiesser S, Kiefer B, Jakob PM. A Fast Method for 1D Non-Cartesian Parallel Imaging Using GRAPPA. Magn Reson Med. 2007 Jun; 57(6):1037-1046.
7. Uecker M, Ong F, Tamir JI, Bahri D, Virtue P, Cheng JY, Zhang T, Lustig M, Berkeley Advanced Reconstruction Toolbox, Annual Meeting ISMRM, Toronto 2015 In: Proc Intl Soc Mag Reson Med 23:2486
8. Porter DA, Heidemann RM. High resolution diffusion-weighted imaging using readout-segmented echo-planar imaging, parallel imaging and a two-dimensional navigator-based reacquisition. Magn Reson Med. 2009;62(2):468-75.
Figures