3948
Simultaneous motion and B0 correction using FID-SNAVS1Robarts Research Institute, London, ON, Canada, 2Department of Medical Biophysics, Schulich School of Medicine and Dentistry, Western University, London, ON, Canada
Synopsis
Global B0 shifts caused by subject motion and scanner heating, result in phase inconsistencies, which lead to image artefacts. In this work, an FID readout is added to Spherical Navigator Echoes (FID-SNAVs) in order to perform retrospective motion and frequency shift (Δf) correction. The accuracy of FID-SNAVs in measuring Δf is evaluated, and simultaneous Δf and motion measurement is demonstrated in phantom experiments. FID-SNAVs estimate Δf accurately, and shifts of approximately -10 to 6Hz are measured during translations of ±1.5cm. Combined Δf and motion correction demonstrates dramatic improvement of image quality compared to motion correction alone.
Introduction
Global shifts in B0, caused by both motion1 and scanner heating,2 result in phase inconsistency in MR data, which may cause ghosting and blurring of the image. The errors caused by shifts in B0 (ΔB0) become especially problematic in image sequences with long echo times (TE). It has been shown that correcting k-space data for the phase error introduced by ΔB0 improves image quality.3
Measuring ΔB0 throughout image acquisition would allow for correction of the resulting phase errors and could be especially beneficial to image quality if paired with motion measurement and correction. Free induction decay (FID) acquisitions, inserted within a pulse sequence have been previously used to measure the change in precession frequency2,4 but never in combination with motion measurement. The combination of an FID with a k-space navigator would allow for simultaneous frequency shift (Δf) and motion monitoring, and ultimately Δf and motion correction.
Spherical navigator echoes (SNAVs)5 – k-space navigators used to measure 3D rigid-body motion – have previously been interleaved within a spoiled gradient echo sequence (SPGR), and used to retrospectively correct brain images.6 In this work we introduce an FID readout prior to the application of the SNAV gradient waveforms (FID-SNAV) and evaluate the accuracy of FID-SNAVs in measuring Δf. We also demonstrate simultaneous Δf and motion measurement in a controlled phantom experiment, and demonstrate improvement of motion measurement accuracy and image quality following correction for Δf.
Methods
FID-SNAV: The FID readout, added immediately prior to the SNAV, is made up of 64 sample points. The SNAV has a radius of 0.4cm-1, 2508 sample points, 125kHz bandwidth, and a 15ms TR. The FID-SNAV is interleaved in an SPGR sequence with TE/TR=3ms/15ms.
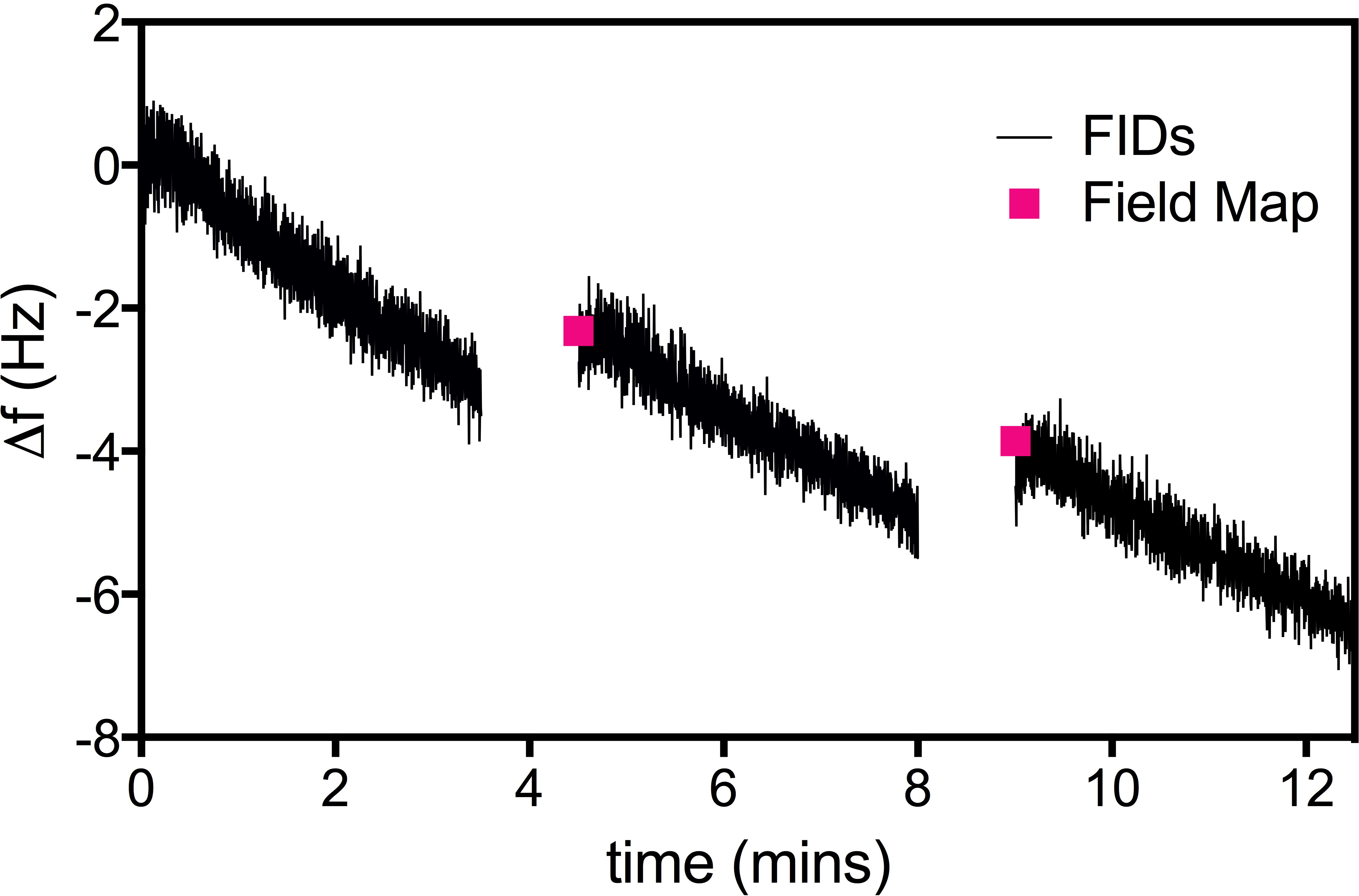
Δf accuracy: A homogeneous spherical phantom was scanned with two sequences: a double-echo SPGR used to generate field-maps, as well as the FID-SNAV scan in which FIDs were acquired every 180ms for 3.5mins. The field-maps were acquired as the first, third and fifth scans while the FID-SNAVs were acquired as the second, fourth, and sixth scans. The Δf calculated from the difference in field-maps was considered as the “standard” and the drift in Δf measured by the FIDs was compared against it.
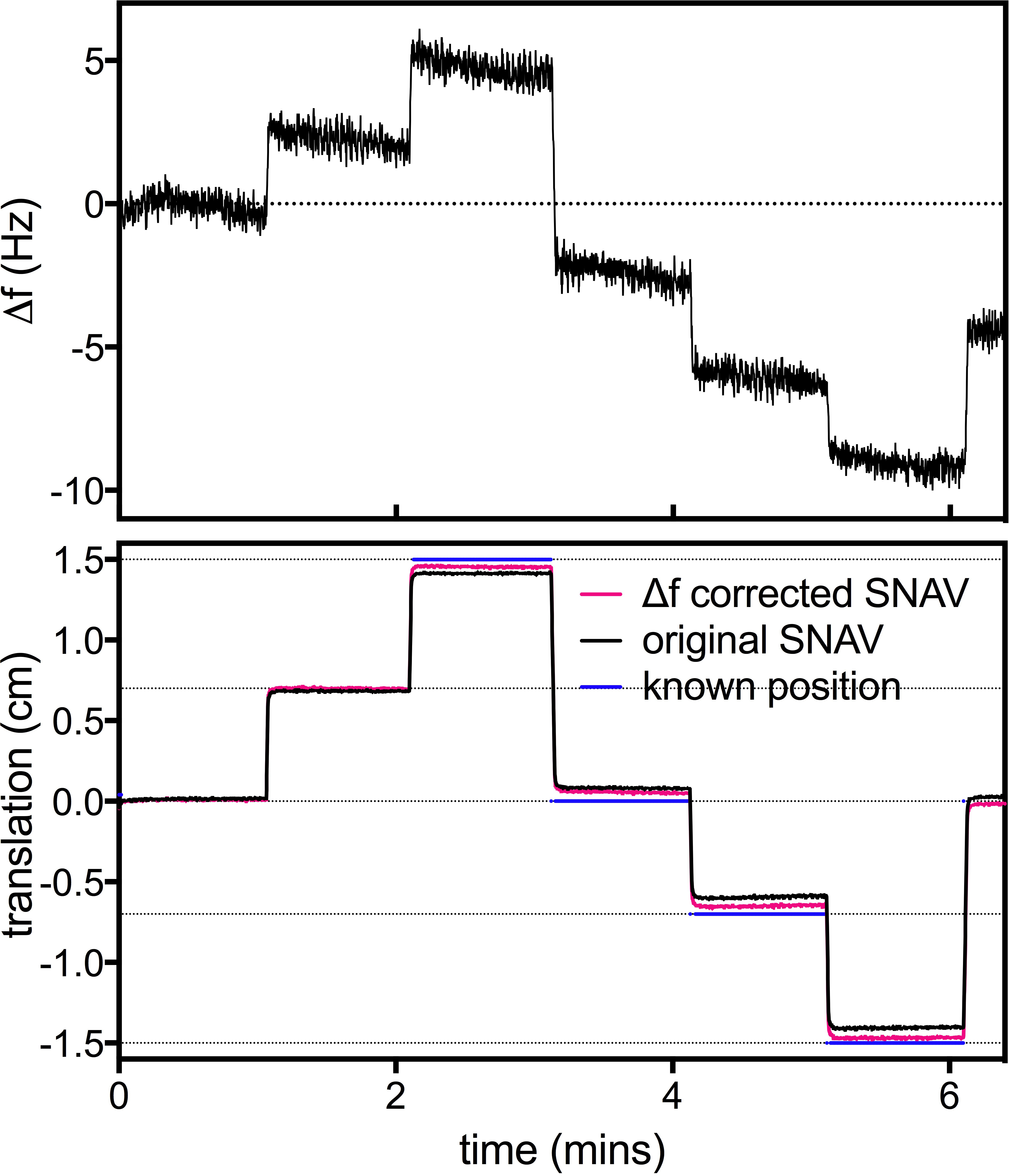
Motion experiment: A pineapple was placed on an MRI compatible linear motion stage7 and a known motion profile with ±1.5cm excursions was delivered while FID-SNAVs were acquired every 120ms for 6.4mins.
Δf and motion measurement and correction: FID-SNAVs and image data were processed in Matlab. The phase shifts between SNAVs were used to calculate translations, while phase shifts between FID sample points were used to calculate frequency shifts. The measured Δf was used to correct the SNAVs by applying the appropriate phase ramp, and translations calculated using the Δf-corrected SNAVs were compared to the original translation estimates and known motion profile. Lastly, two corrected images were generated: the first was motion corrected using the SNAV translation estimates, and the second was both motion corrected using the Δf-corrected SNAVs, and Δf corrected.
Results
Δf accuracy: The FID-SNAVs measured a linear frequency drift of 0.80 ± 0.16Hz/min (Fig. 1). Δf values measured using the field-maps agree with those measured using FID-SNAVs (error=0.26Hz).
Motion and Δf measurement: SNAVs measured the prescribed motion profile within a maximum error of 0.9mm. Frequency shifts of -10Hz to 6Hz, measured using the FIDs (Fig 2a), clearly correspond to the measured motion (Fig 2b). Following Δf correction of the SNAVs, accuracy of translation estimates improved and the maximum error was reduced to 0.5mm.
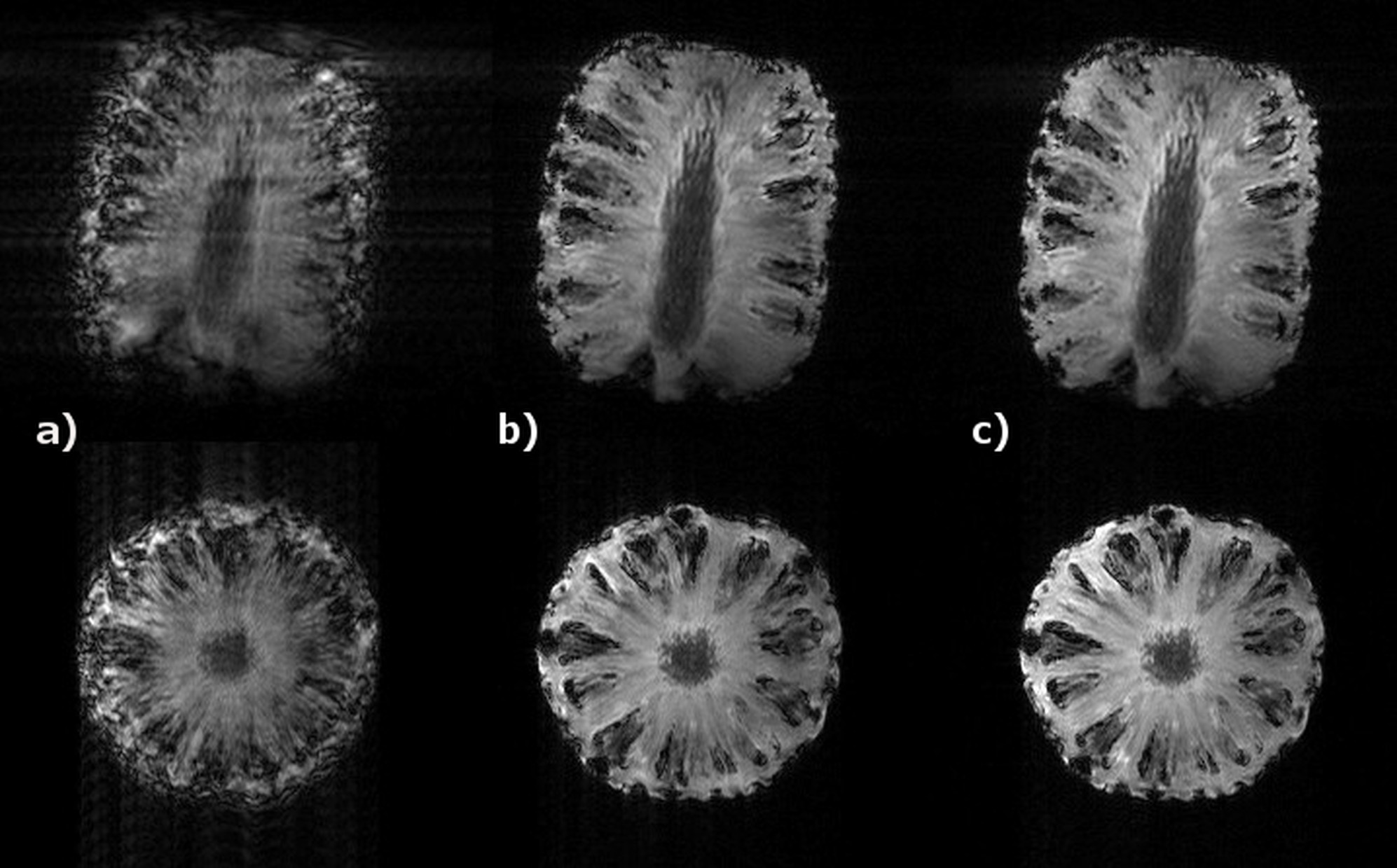
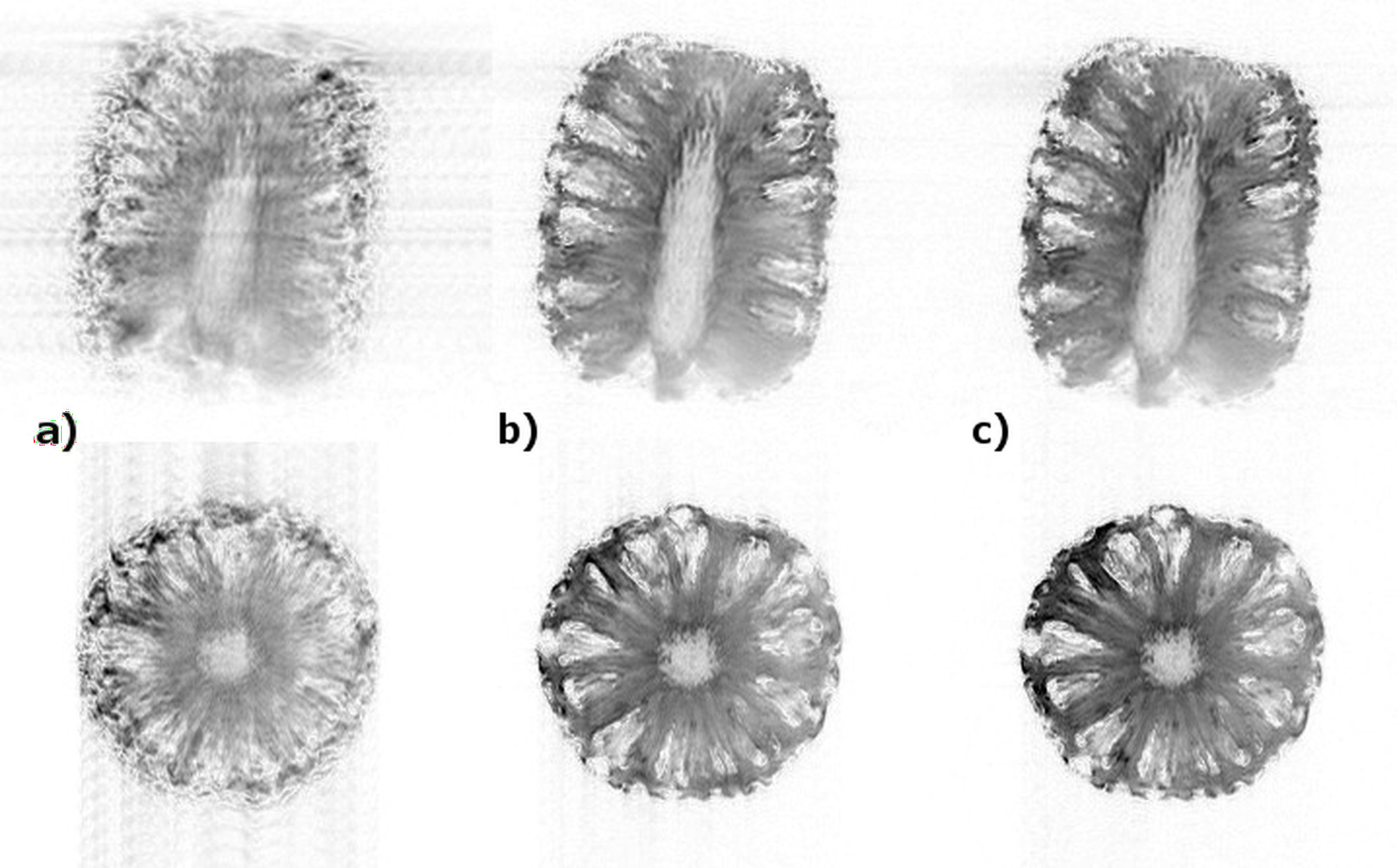
Simultaneous Motion and Δf Correction: Figure 3 demonstrates that artefacts visible in the uncorrected image (a), are greatly reduced following motion correction (b) and an even greater improvement of image quality is evident following correction for motion and Δf (c). The inverted greyscale representation (Fig 4.) highlights this improvement in image quality.
Discussion/Conclusions
In this work, FIDs were added to SNAV acquisitions, thereby allowing monitoring of the Δf associated with motion and scanner heating. In controlled phantom experiments, we demonstrated that FID-SNAVS accurately measure Δf and motion simultaneously and that Δf correction improves motion estimation and image quality. In this proof of concept work, FID-SNAVs are interleaved in an SPGR sequence, and dramatic image quality improvement was observed following correction for Δf, despite the short TE of the sequence (3ms). Greater phase errors accumulate in sequences with longer TE’s, which are often associated with a longer acquisition time, rendering them more sensitive to field drift and motion. Incorporation of the presented FID-SNAV technique into long TE sequences and evaluation of FID-SNAVs in-vivo will be the focus of future work.Acknowledgements
The authors acknowledge funding from the Natural Sciences and Engineering Research Council of Canada. M.D. is a Career Investigator of the Heart and Stroke foundation of Ontario and P.M.J. is supported in part by an Ontario Graduate Scholarship. We also thank Dr. T. Wade for help with pulse sequence implementation.References
1. Van de Moortele PF, Pfeuffer J, Glover GH, Ugurbil K, Hu X. Respiration-induced B0 fluctuations and their spatial distribution in the human brain at 7 Tesla. Magn Reson Med 2002;47:888-895.
2. Tal A, Gonen O. Localization Errors in MR Spectroscopic Imaging due to the Drift of the Main Magnetic Field and their Correction. Magn Reson Med 2013;70:895-904.
3. Loktyushin A, Scholkopf B, Scheffler K. Autofocussing-based correction of B0 fluctuation-induced ghosting. Proc Intl Soc Mag Reson Med 24; (2016):1848
4. Kramer M, Reichenbach JR. High resolution T2(*)-weighted Magnetic Resonance Imaging at 3 Tesla using PROPELLER-EPI. Z Med Phys 2014;24:164-173.
5. Liu J, Drangova M. Rapid six-degree-of-freedom motion detection using prerotated baseline spherical navigator echoes. Magn Reson Med 2011;65:506-514.
6. Johnson PM, Liu J, Wade T, Tavallaei MA, Drangova M. Retrospective 3D motion correction using spherical navigator echoes. Magn Reson Imaging 2016;34:1274-1282.
7. Tavallaei MA, Johnson PM, Liu J, Drangova M. Design and evaluation of an MRI-compatible linear motion stage. Med Phys 2016;43:62.
Figures