3335
The Effects of 2D Navigator Distortion and Noise Level on Interleaved EPI DWI Reconstruction: A Simulation Study1Center for Biomedical Imaging Research, Department of Biomedical Engineering, School of Medicine, Tsinghua University, Beijing, People's Republic of China, 2Vascular Imaging Laboratory, Department of Radiology, University of Washington, Seattle, WA, United States
Synopsis
Interleaved EPI (iEPI) with a 2D navigator is an effective way to acquire high-resolution and less-distorted DWI. The inter-shot phase variations can be corrected with acquired 2D navigator. However, the performance is limited by the geometric distortion mismatch between the navigator-echo and image-echo. Parallel imaging can be used to reduce the navigator distortion, but can cause noise amplification. Previously, the effects of the navigator were studied with in vivo experiments, but the effects of distortion and noise were mixed together. In this study, the effects of navigator distortion and noise are studied individually with both DWI and DTI simulations.
Purpose
Compared with single shot EPI (ssh-EPI), interleaved EPI (iEPI) with a 2D navigator is an effective way to acquire higher-resolution and less-distorted DWI. However, under the presence of strong diffusion sensitizing gradients, physiological motion can cause phase variations among different shots (1,2). Such inter-shot phase variations can be corrected with an acquired 2D navigator, but the performance may be limited by the geometric distortion mismatch between the navigator and image-echo (3-5). Parallel imaging can be used to reduce the navigator distortion, but can cause noise amplification. Previously, the effects of the navigator were studied with in-vivo experiments (6), but the effects of distortion and noise were mixed together. In this study, the effects of navigator distortion and noise are studied individually with both DWI and DTI simulations. Meanwhile, two different reconstruction methods, based on either image or k-space, are compared.Methods
Reference data acquisition A high-SNR T2-weighted TSE brain image was acquired on a Philips 3.0T Achieva TX MRI scanner (Philips Healthcare, Best, The Netherlands) using a 32-channel head coil. The main imaging parameters were: FOV=256×256 mm2, voxel size=1×1 mm2, slice thickness=4 mm, TE=80 ms, TR=3 s. The T2W image was used as the reference image in the DWI simulation. The B0 field map was estimated using the vendor’s built-in 3-point DIXON method, which would be used in the distortion simulation.
An 8-shot iEPI DTI acquisition with a 2D navigator was also conducted, with 10 diffusion encoding directions and b=800 s/mm2. The main imaging parameters were: FOV=224×224 mm2, voxel size=1×1 mm2, slice thickness=4 mm, TE=74 ms, TR=3 s. Then the DW image was reconstructed using a k-space-based method (4). The reconstructed DW images were used as the reference images in the DTI simulation.
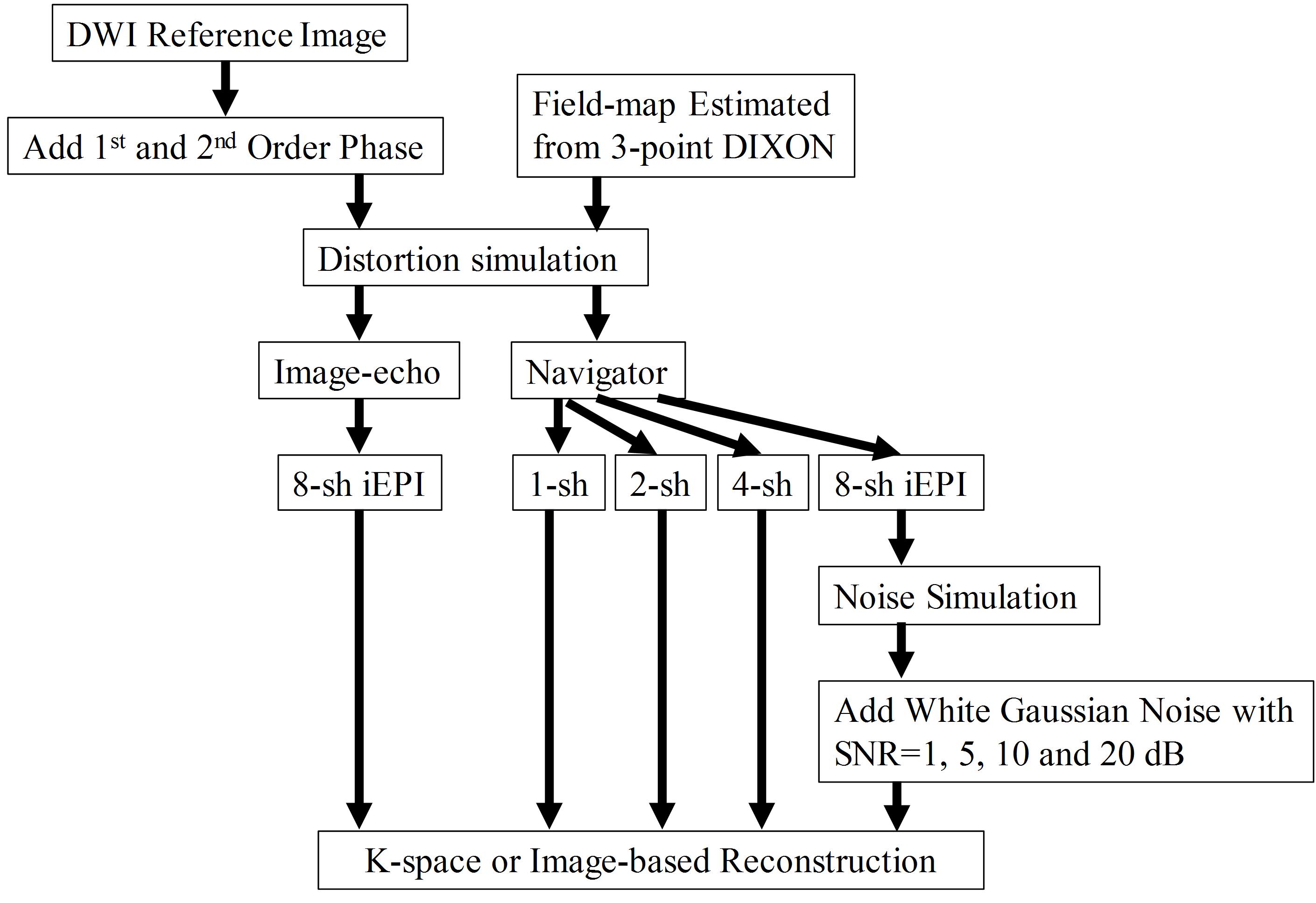
Simulation process The DWI simulation process is shown in Fig. 1. First, the T2W reference image was multiplied with first-order and second-order spatially varying phase map, which mimicked the inter-shot phase variations in multi-shot DWI. Then 8-shot iEPI acquisition was used to generate the image-echo. Meanwhile, 1-shot, 2-shot, 4-shot and 8-shot iEPI acquisition were used to generate navigators. Here the number of shots determined the navigator distortion levels. The 8-shot iEPI navigator was assumed to generate fully-match image with that of the image-echo. After that, the image-echo and navigator were Fourier transformed to k-space. Spatially uncorrelated Gaussian noise (SNR=1, 5, 10, 20 dB) was added to the fully-matched navigator to generate navigator with different noise levels.
The DTI simulation process was the same as the DWI simulation (Fig. 1), but with more diffusion encoding directions. Considering the intrinsically low SNR of DW image, the noise effects were not evaluated in the DTI simulation.
Reconstruction Two different reconstruction methods, performed either in image or k-space domain were used for iEPI DWI reconstruction. The image-based reconstruction was the POCSMUSE algorithm (7). However, different from the original paper, the inter-shot phase maps here were estimated from the simulated 2D navigator. The iteration tolerance error was 0.001. The k-space-based reconstruction was the extended GRAPPA with compact kernel (4). The interpolation kernel was 3×5 (kx×ky). No regularization was used for either the image-based or the k-space-based reconstruction.
Results and Discussion
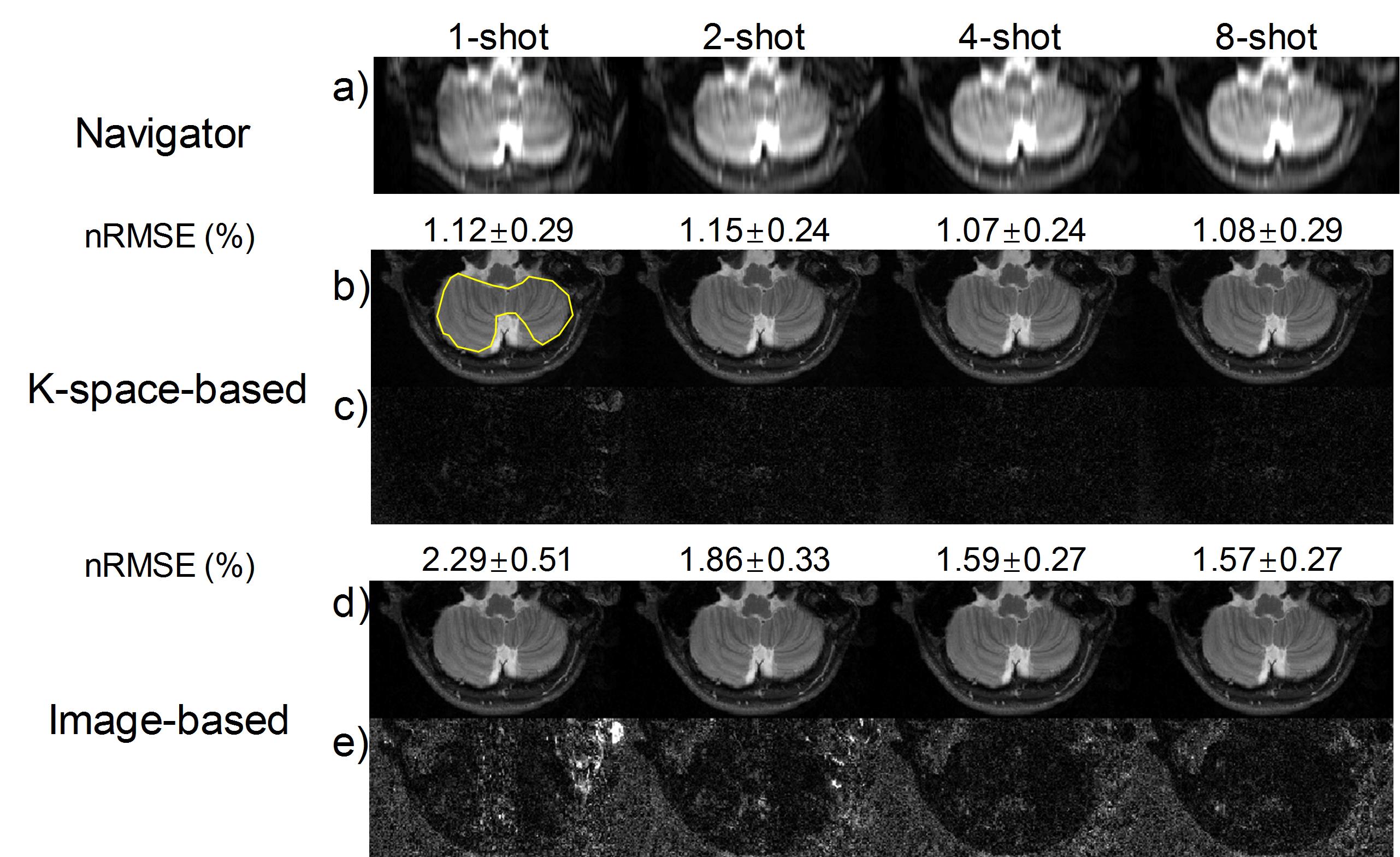
Fig. 2 shows the DWI simulation results with different navigator distortion levels, indicated by the number of shots for the navigator simulation. The average nRMSEs for ROI (yellow polygon) in each image were calculated from 10 repeated simulations. For POCSMUSE, image improvement is obvious from 1-shot to 2-shot acquisition, but not obvious when further reducing the navigator distortion. The nRMSEs from the k-space-based method are more constant among different navigator simulations and are lower than the image-based method overall.
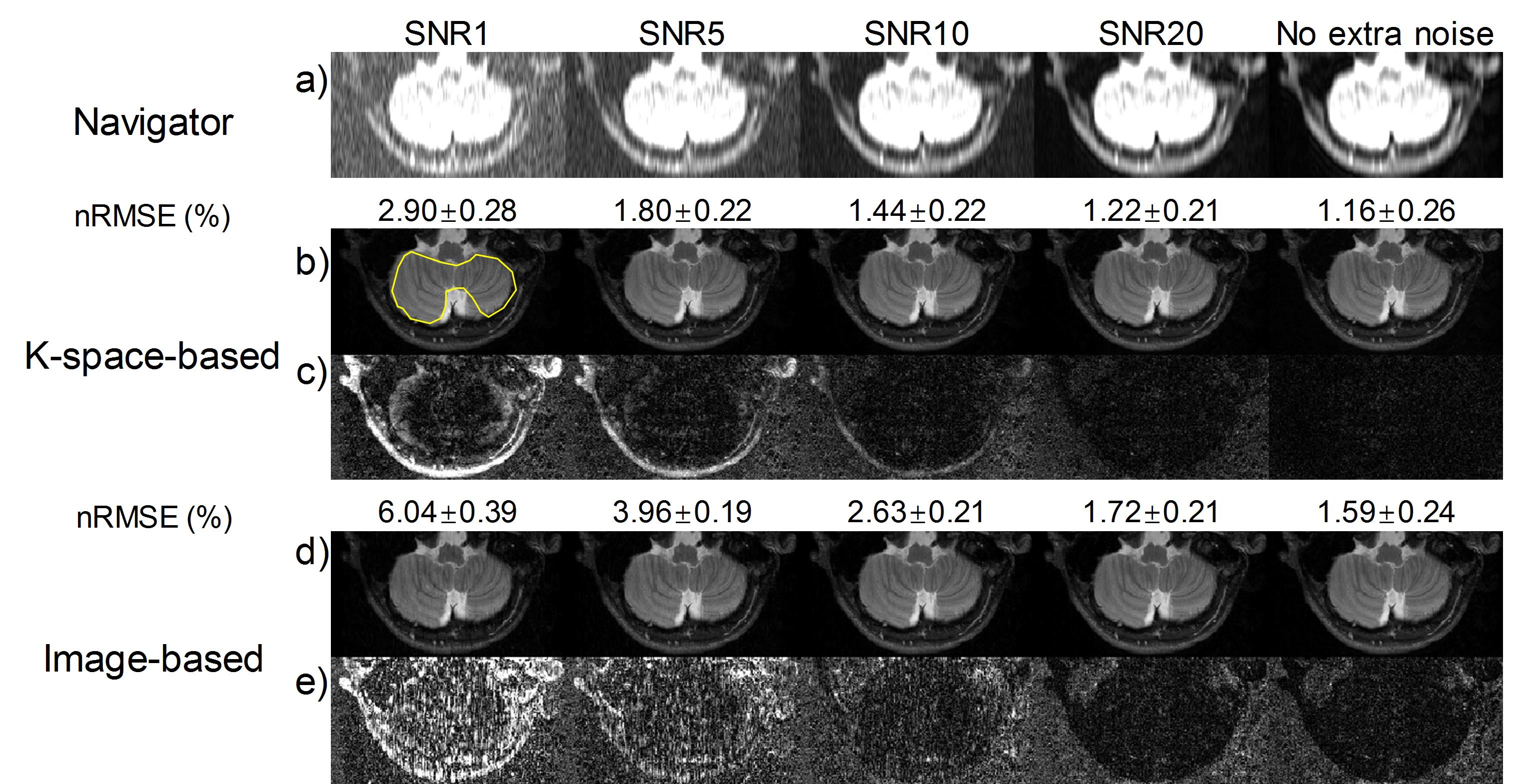
Fig. 3 displays the DWI simulation results with different noise levels. When the noise level decreases, the image quality from both the image-based and the k-space-based method increases.
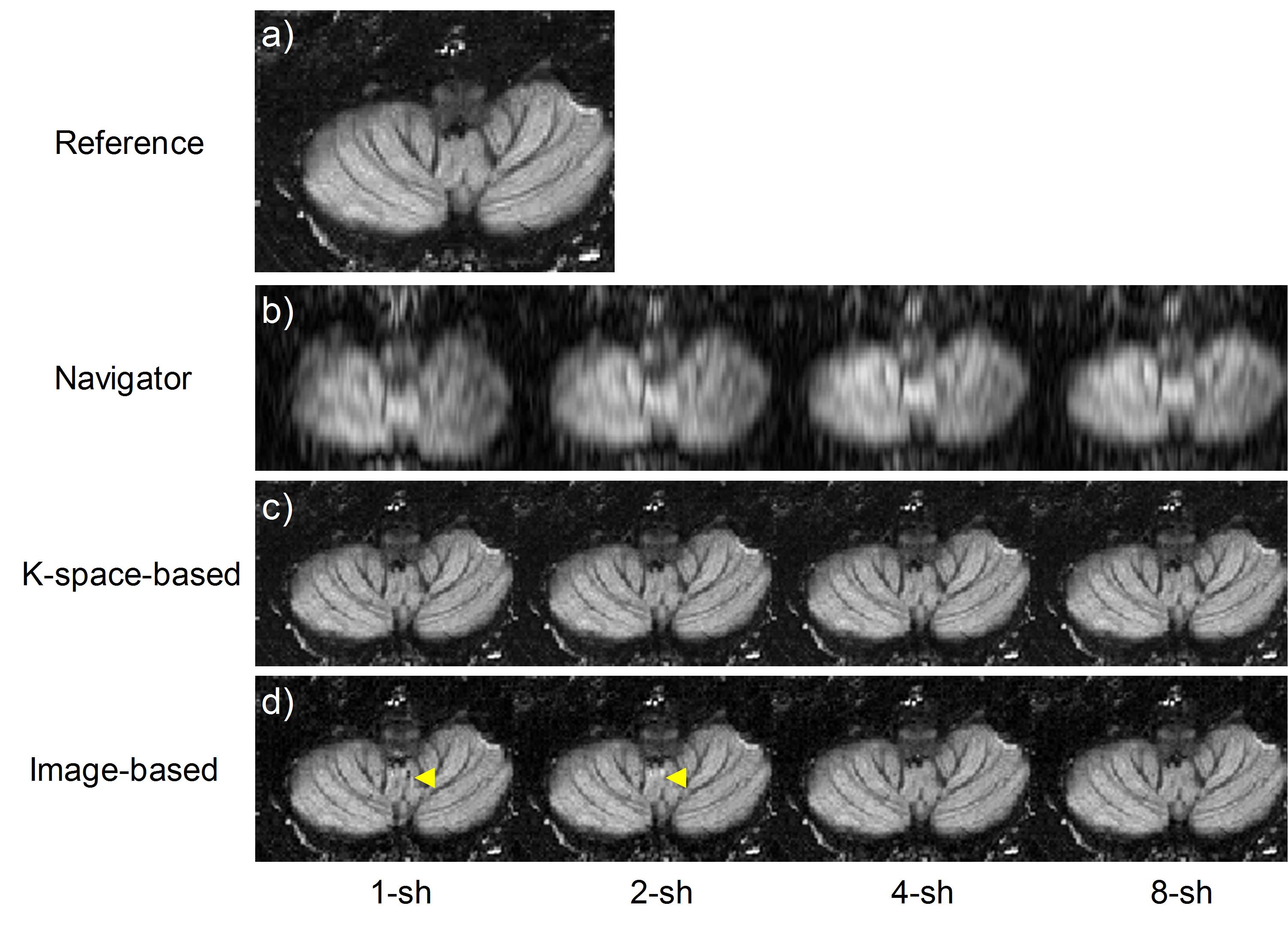
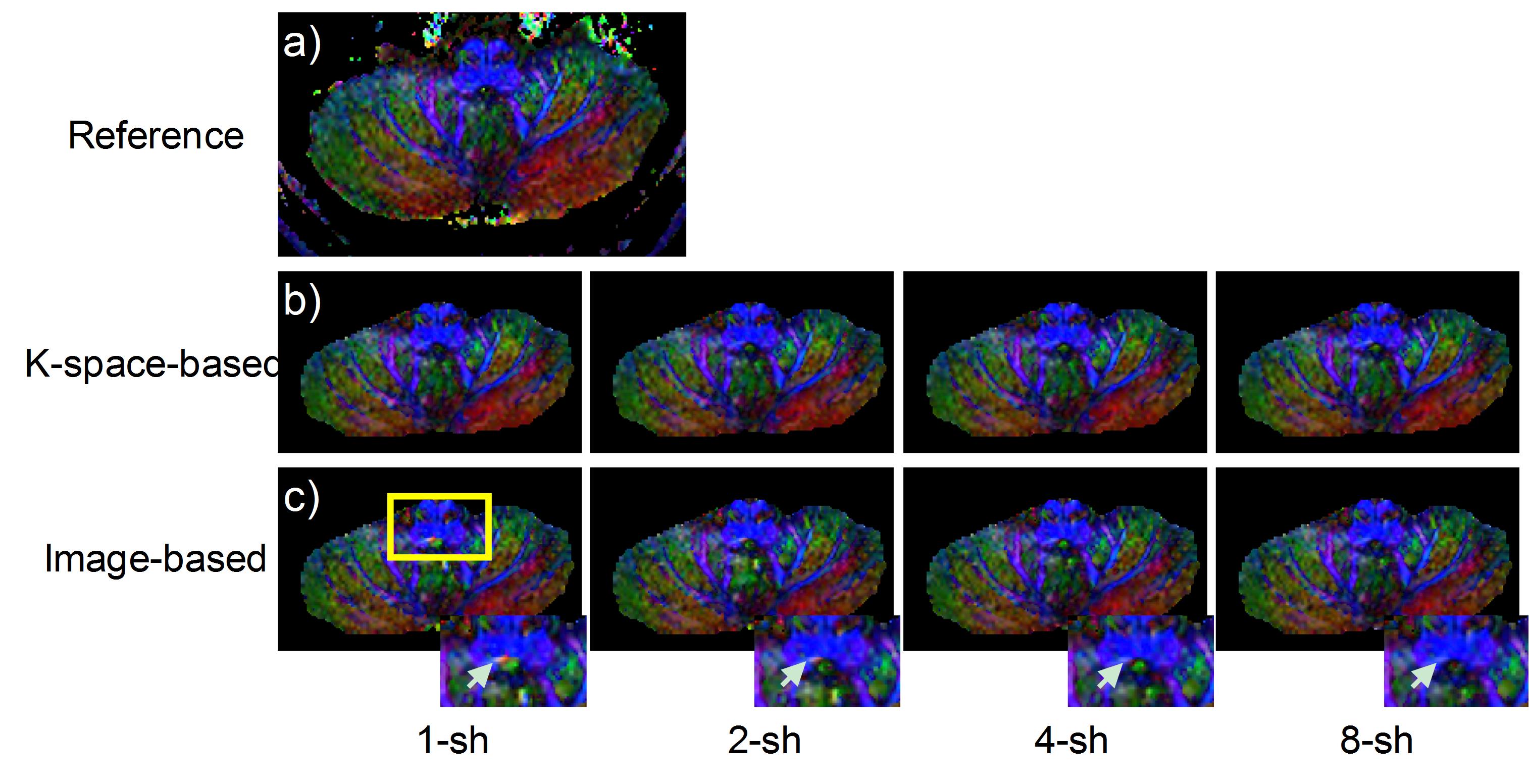
Fig. 4 shows the DTI simulation results with different navigator distortion. The conclusion is consistent with Fig. 2. The corresponding color-coded FA (cFA) maps are shown in Fig. 5. Artifacts (white arrowheads) can be seen in the reconstruction using the image-based methods, especially for navigators from 1-shot and 2-shot acquisitions.
Conclusion
Since the k-space-based method does not involve pixel-wise operations in the image domain, it may be less sensitive to the navigator distortion. The performance of POCSMUSE improves with a less distorted navigator and may not require a fully-matched navigator. The sensitivity map in POCSMUSE is derived from b=0 data without background masking, which can affect the noise level in the final image. Although parallel imaging can reduce the navigator distortion, the amplified navigator noise may bring extra errors.Acknowledgements
No acknowledgement found.References
1. Anderson AW, Gore JC. Analysis and correction of motion artifacts in diffusion weighted imaging. Magn Reson Med 1994;32:379-387.
2. Miller KL, Pauly JM. Nonlinear phase correction for navigated diffusion imaging. Magn Reson Med 2003;50:343-353.
3. Jeong HK, Gore JC, Anderson AW. High-resolution human diffusion tensor imaging using 2-D navigated multishot SENSE EPI at 7 T. Magn Reson Med 2013;69:793-802.
4. Ma X, Zhang Z, Dai E, Guo H. Improved multi-shot diffusion imaging using GRAPPA with a compact kernel. Neuroimage 2016;138:88-99.
5. Liu W, Zhao X, Ma Y, Tang X, Gao J-H. DWI using navigated interleaved multishot EPI with realigned GRAPPA reconstruction. Magn Reson Med 2016;75:280-286.
6. Dai E, Ma X, Zhang Z, Yuan C, Guo H. The Effects of Navigator Distortion Level on Interleaved EPI DWI Reconstruction: A Comparison Between Image and K-Space Based Method. In Proceedings of the 24th Annual Meeting of ISMRM, Singapore, 2016. Abstract 0208.
7. Chu ML, Chang HC, Chung HW, Truong TK, Bashir MR, Chen NK. POCS-based reconstruction of multiplexed sensitivity encoded MRI (POCSMUSE): A general algorithm for reducing motion-related artifacts. Magn Reson Med 2015;74:1336-1348.
Figures