2685
A scalable, MR compatible temperature measurement and control system1Institute for Biomedical Engineering, University and ETH Zurich, Zurich, Switzerland, 2University and ETH Zurich, Zurich, Switzerland
Synopsis
Tight temperature control of various devices is required to guarantee highly stable experimental conditions. E.g. B0 field shifts induced by heating of shim irons or gain changes induced in preamplifiers can be avoided by oven controlling the critical components of the device. Furthermore, a recently presented approach of active shimming with controlled magnetic materials requires tight temperature control of a large count of devices in parallel in the bore. For such applications, we present a 14 channel, low power, MR compatible temperature measurement and control system which can be parallelized for a scalable channel count.
Purpose
Temperature
drifts are a major source of measurement instabilities in RF devices, coils, magnets
and passive shimming units and are typically hard to calibrate. Therefore, tight
temperature control of various devices is often required for achieving a high
degree of reproducibility. Such oven controlling could suppress B0 field drifts
induced by heating up shim irons as well as temperature induced signal alterations
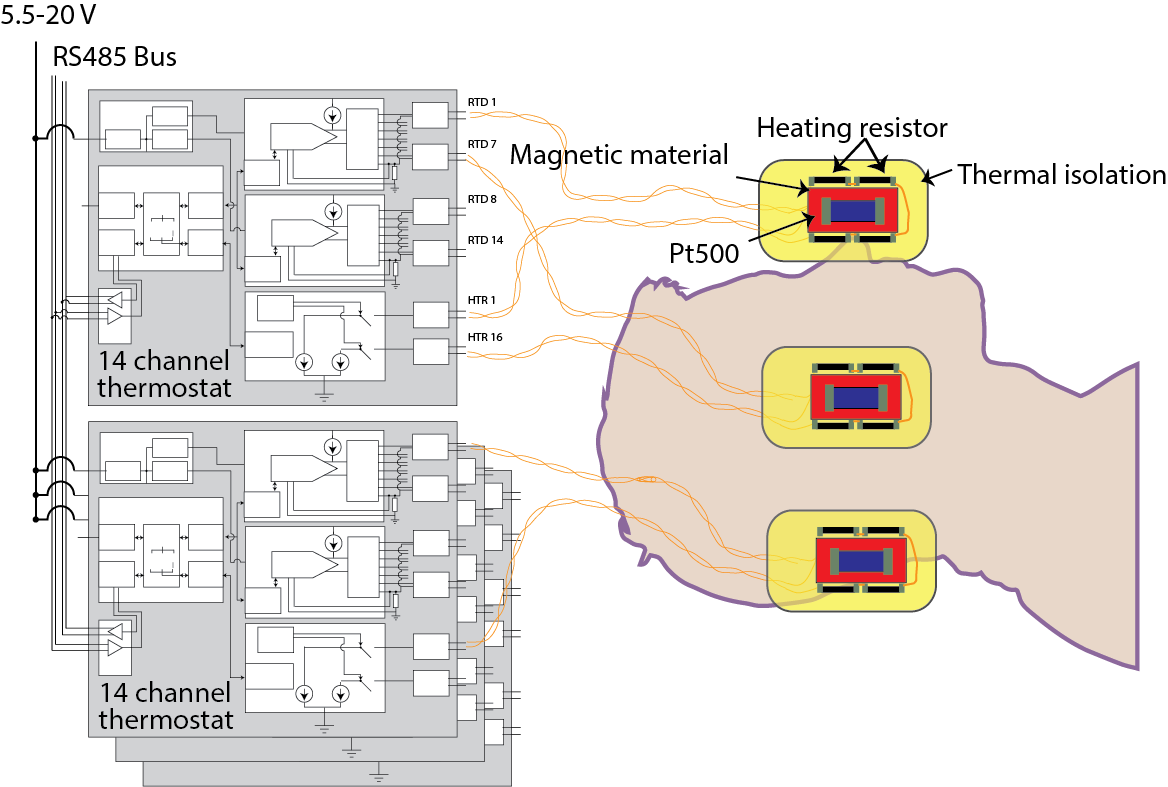
in RF chains and coils. Additionally, a recently demonstrated approach for
local shimming using temperature controlled magnetic materials [1] requires
tight temperature control of a large count of particles. In order to keep the
cable count and the interferences low, the control system has to be located in
the bore.
Therefore a
high channel count, MR compatible modular thermostat system is required. In
particular, when temperature controlled components, such as the mentioned magnetic
materials, have to be integrated into local coil arrays the thermostat is
required to have a small form factor, low weight, low power consumption and must
connect via a low count of cables.
In this
work we present a modular, parallelizable, MR compatible, miniature thermostat
system with scalable channel count comprising means for high fidelity reading of
temperature sensors, power efficient control of heating currents and a
digitally programmable control loop.Methods
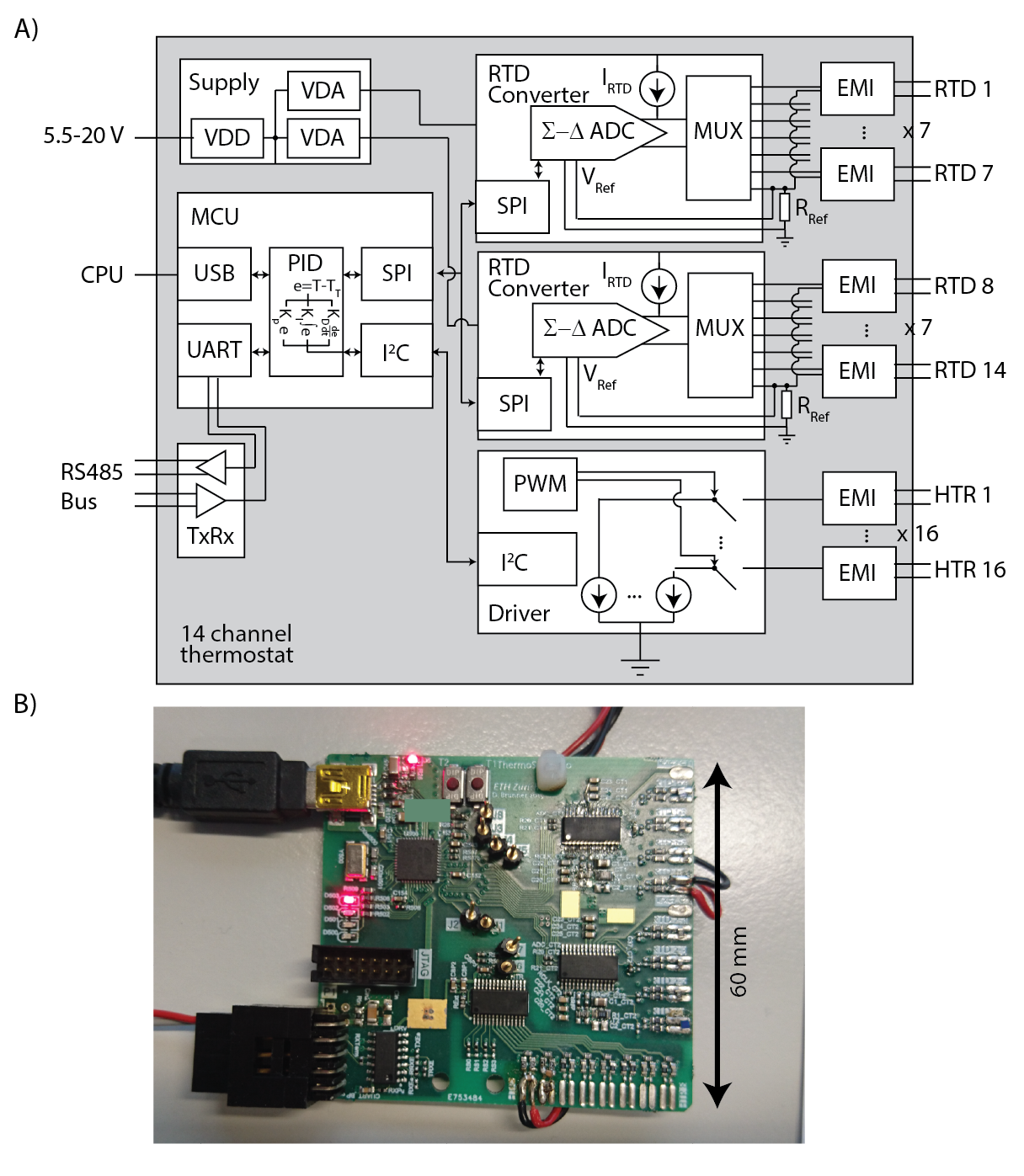
The system
is composed of small (62x60 mm) PCBs (Fig.1) that can be controlled fully in
parallel via a single supply line and a RS485 bus requiring only minimum wiring
connections (Fig.2). Each board offers 24-bit readings of 14 thermocouples
(RTD), a 4 MHz controller for flexible implementation of the actual control
loop function and 8-bit pulse-width-modulation (PWM) control of the heating
power of 16 heaters in parallel with maximally 2.4W each. Each board hosts
supply voltage regulation for all components offering a high grade of interference
rejection on the supply line as required for in-bore operation. Each board has
isolated line drivers for the communication bus and an USB2.0 connection for
debugging purposes.
The reading
of the temperature sensors [2] is implemented using two 24-bit sigma-delta
converter with integrated precision current sources (ADS1248, TI, Dallas, TX,
USA). The 7 thermocouples attached to one ADC unit are sequentially connected
via the integrated switches and have individual filters for blocking RF interferences.
Both converters can be configured and operated fully in parallel. The
resistance of the RTD is measured in a ratiometric fashion in order to suppress
externally induced voltages.
The control
of the heating current is implemented using a 16-channel LED low side PWM
driver (TLC59116, TI, Dallas, TX, USA). The device integrates the generation of
the modulation frequency, the constant current sources and the switches in a
minimal form factor reducing emission of electromagnetic interferences. The outputs
of the controller are filtered.
The control
loop is a remotely parameterizable proportional-integral-differential
controller (PID) with integral term clamping implemented on an 8-bit
microcontroller (MCU, ATmega32U4, Atmel, San Jose, CA, USA). The peripheral
devices are connected via different bus systems in order to provide largely
parallel data transfers.Results
The noise
of the RTD reader using a Pt500 thermistor (IRTD=1mA) was
0.0034°K/√Hz. The loop roundtrip time for 1 channel was below 15ms, for 14 below
60ms.
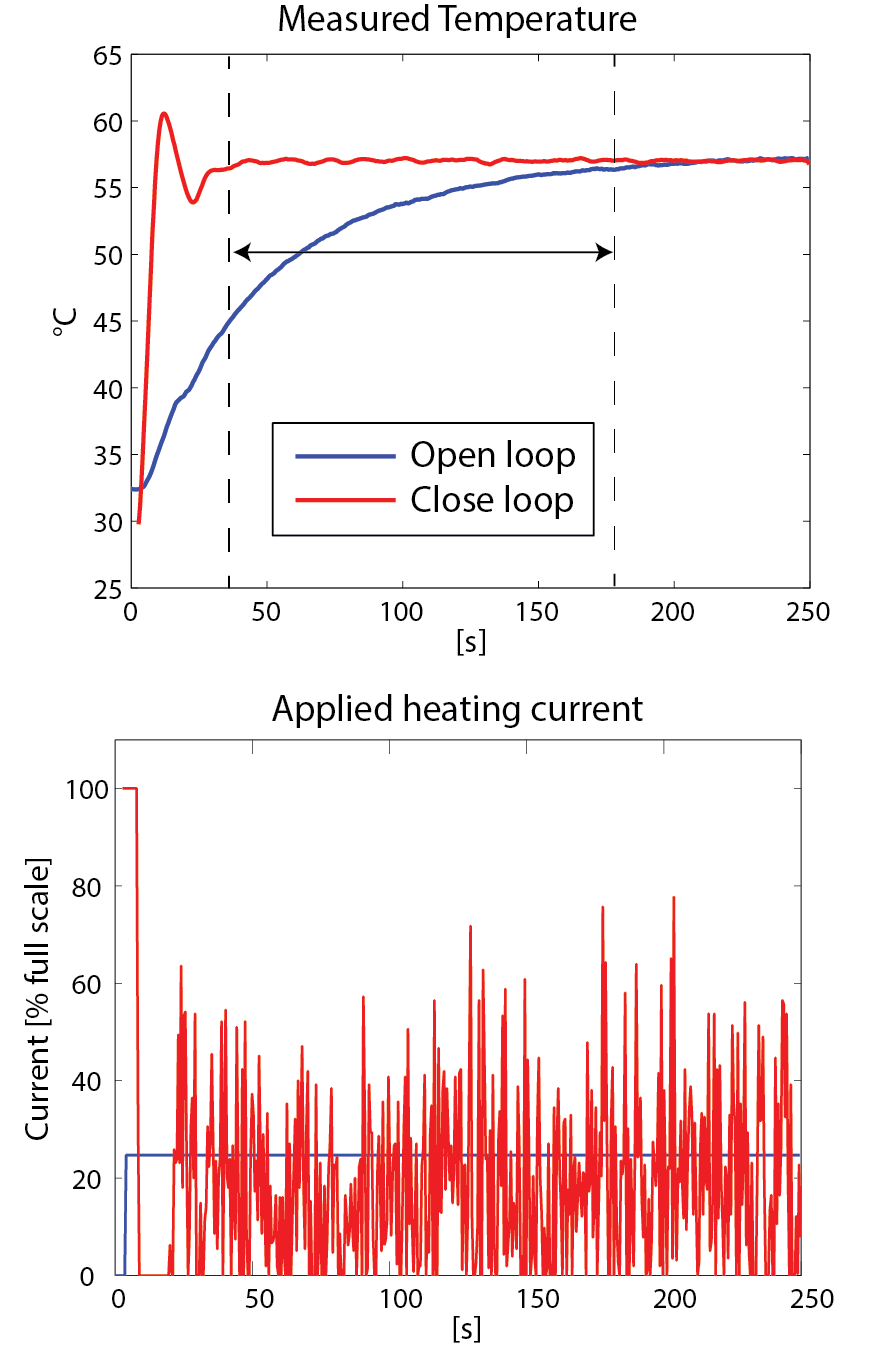
Fig.3 shows
an example of regulating the temperature of a device that is briefly exposed to
an airstream as present in the bore in comparison to the unregulated case. It is seen that temperature drifts are majorly suppressed.
Fig.4
compares levelling of a shim unit from room temperature to 57°C with and
without feedback loop exhibiting a speed advantage of more than 4 times using
active regulation. The applied heating current shows that the regulator makes
use of the full power in order to achieve a fast temperature rise initially.Conclusion
Precision
measurements and control of the temperature of small components is realized MRI
compatibly even for large channel counts regarding form factor, cabling, power
consumption and its magnetic moment.
Accurate
temperature measurements give valuable information on system components in
bore. Furthermore, thigh control of shim irons can either be used for
stabilizing the main magnetic field or for adaptive control for shimming
purposes.
Active
temperature control effectively stabilizes the temperature of a device and
provides a several times faster settling. The latter is required in particular
for adjusting shim settings using controllable magnetic materials [1] in order
to keep preparation times low. In conjunction with the small form factor, the
power efficient design and the low count of required cabling these systems can be
directly employed for control of such on-coil shimming units. Acknowledgements
No acknowledgement found.References
[1] Brunner DO et al. Magnetic Pebbles – Materials with Controllable Magnetism for Compact, Low-Power Shim Units, Proc ISMRM 2016, Singapore, p.0492
[2] Haefner J et al, Development of a cost-effective and MRI compatible temperature measurement system, Biomed Tech 47 Suppl 1 Pt 2 , 2002, p. 664-667
Figures