2684
Dynamic B0 Shim Controller for Digital Pre-emphasis with Sub-millisecond Update Rate1MPI for Biological Cybernetics, Tuebingen, Germany, 2IMPRS for Cognitive and Systems Neuroscience, Eberhard University of Tuebingen, Tuebingen, Germany, 3Institute of Physics, Ernst-Moritz-Arndt University Greifswald, Greifswald, Germany
Synopsis
High-order dynamic B0 shimming has been shown to improve the shim quality for multi-slice acquisition schemes. However, for gradient intensive sequences, eddy currents become a major problem and pre-emphasis is required. The pre-emphasis can be done flexibly with the use of digital filters as they can drive arbitrary-shaped waveforms and are scalable to a larger number of channels.
In this work, we design and implement a system to perform dynamic B0 shimming with digital pre-emphasis with a very fast update rate. The setup is then tested for performing pre-emphasis on a 9.4T scanner.
Purpose
Develop a low-cost controller for digital pre-emphasis of dynamic B0 shimming with sub-millisecond update rate.Introduction
High-order dynamic B0 shimming has been shown to improve the shim quality for multi-slice acquisition schemes1,2. This is especially true at ultra-high field strengths. However, for gradient intensive sequences, eddy currents become a major problem and pre-emphasis is required1,3,4. The pre-emphasis can be done flexibly with the use of digital filters as they can drive arbitrary-shaped waveforms and are scalable to a larger number of channels. In this work, we design and implement a system to perform dynamic B0 shimming with digital pre-emphasis with a very fast update rate. The setup is then tested for performing pre-emphasis on a 9.4T scanner.Methods
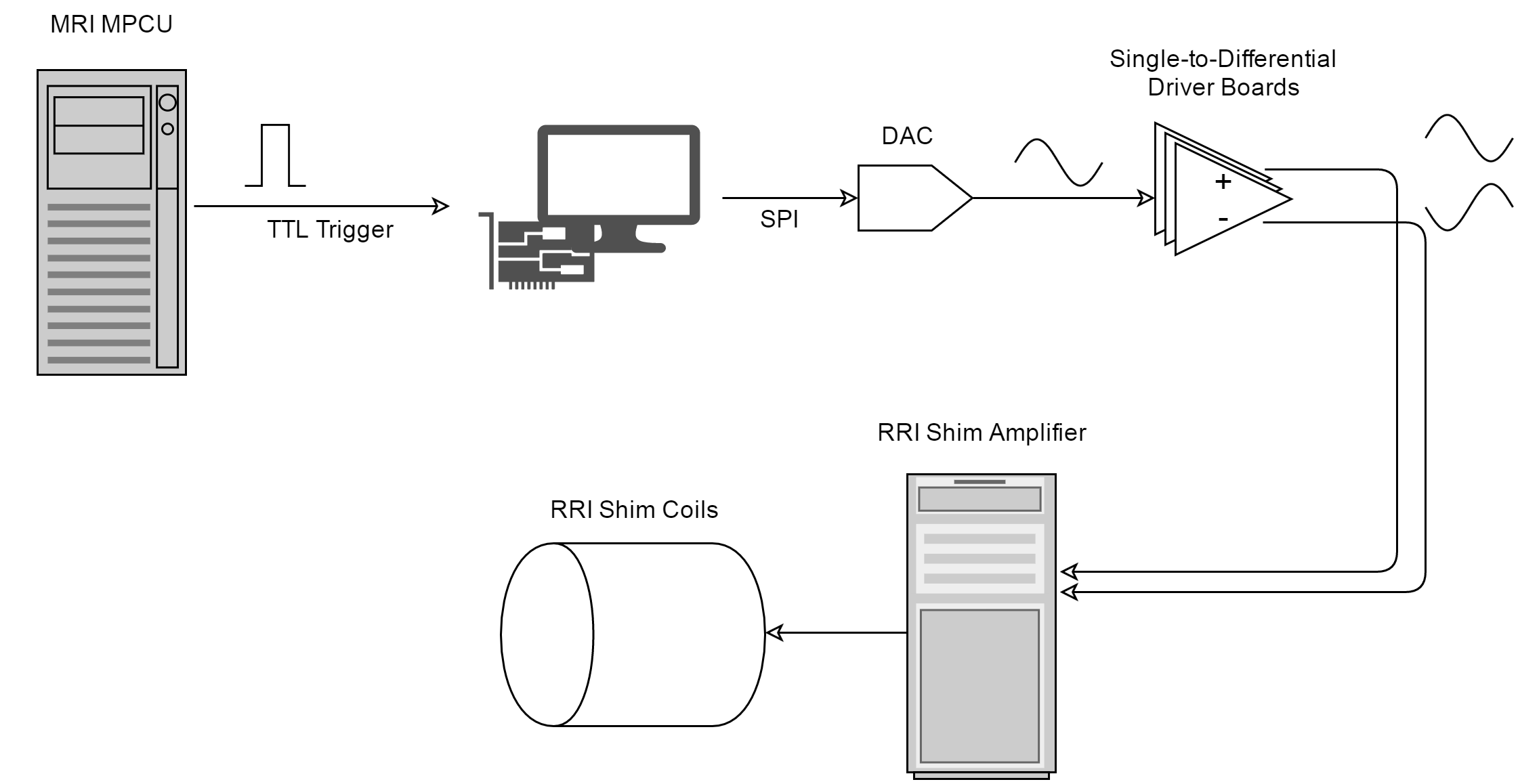
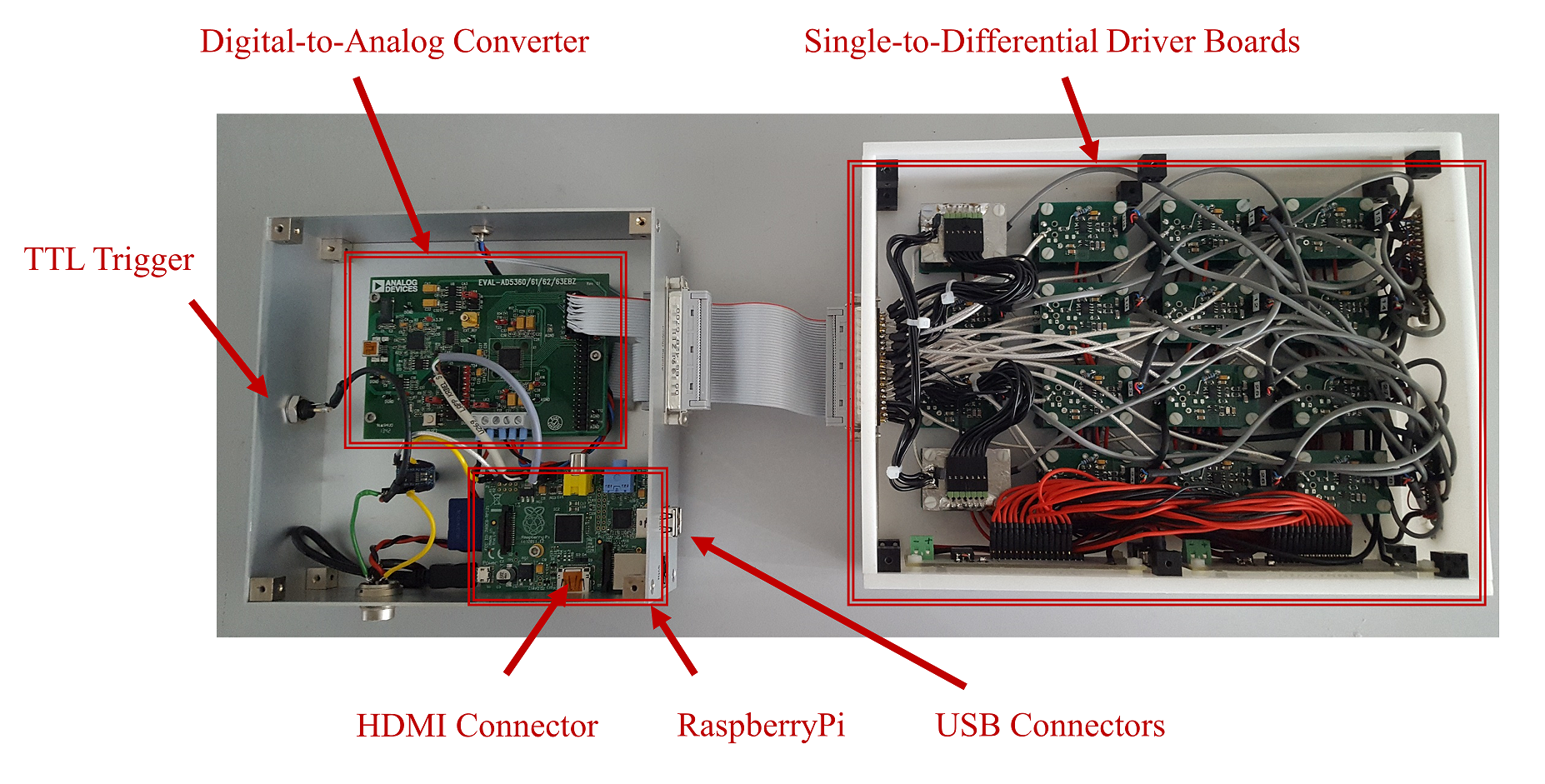
The hardware setup is shown in Fig. 1. A commercial off-the-shelf microprocessor (the RaspberryPi B) was used as the controller and a 16-channel digital-to-analog converter (DAC) AD5360 was used to communicate with the shim amplifiers. The RaspberryPi used a 5MHz serial peripheral interface (SPI) protocol to update the DAC. This hardware setup was used to implement a digital pre-emphasis filter for dynamic B0 shimming (Fig. 2). The RaspberryPi also had an extra TTL input trigger (from the MRI scanner) to signal when the shim currents should be updated.
A 28-channel very high-order insert shim system from Resonance Research Inc. (Billerica, MA) was used for B0 shimming. The shim amplifiers have auxiliary differential analog inputs for driving the coils. The analog outputs from the DAC were converted to differential signals using a bank of driver boards from Texas Instruments (AN-1812). These boards were modified to accept DC currents and were also biased to half the supply voltage. The hardware is depicted in Fig. 2.
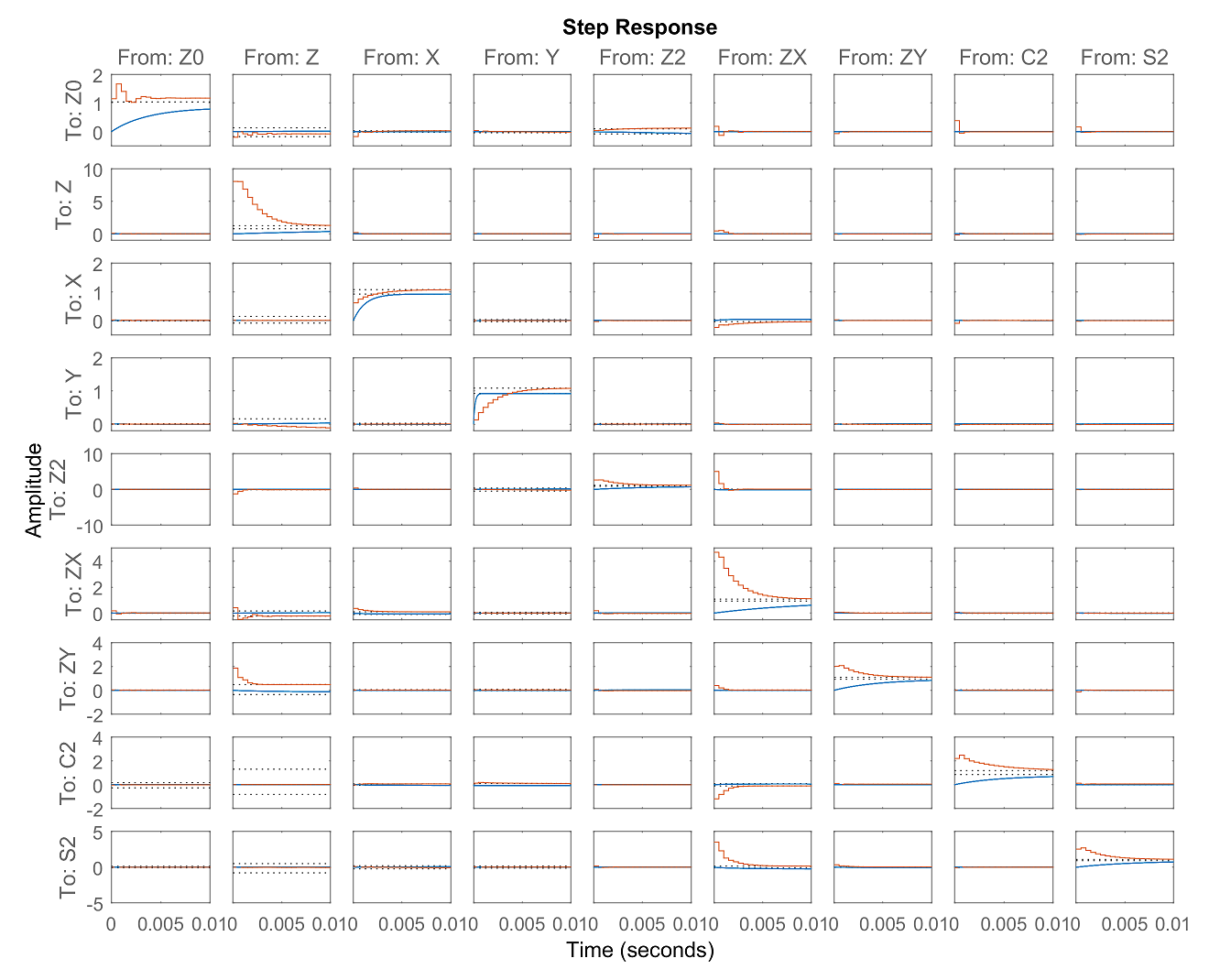
For system identification, step inputs of 1A were applied to each of the shim channels (consecutively) and the time dynamics of the B0 field were measured. The measurements were performed using a custom built 12-probe NMR field camera and the camera was moved to multiple positions to increase the number of spatial sample points (to more than 40 points).
The B0 shim system was characterised with considerations for all self- and cross-terms. The system was modelled up to and including a full 4th order spherical harmonic system. However, only up to 2nd order shim terms were used for proof of concept (and without loss of generality). Thus the shim fields were decomposed up to 2nd order spherical harmonics. A multivariable system was estimated using transfer functions modelled using the instrument variable approach5. The system model was inverted in the state-space domain6 and discretised using a zero-order hold z-transform.
The digital pre-emphasis filter was calculated from the inverted system model using a 3rd order filter with a 100us sampling rate. To test the pre-emphasis, the shim coils were driven again with a 1A step input on each shim channel but this time, using the custom hardware and the digital pre-emphasis. Once again, the field camera was used to monitor the shim fields.
Results and Discussion
The calculated pre-emphasis filter that needed to be applied is shown in Fig. 3. Hardware was designed and built to apply the digital pre-emphasis filter at 9.4T. The effective update rate was approximately 100us (15us per channel).
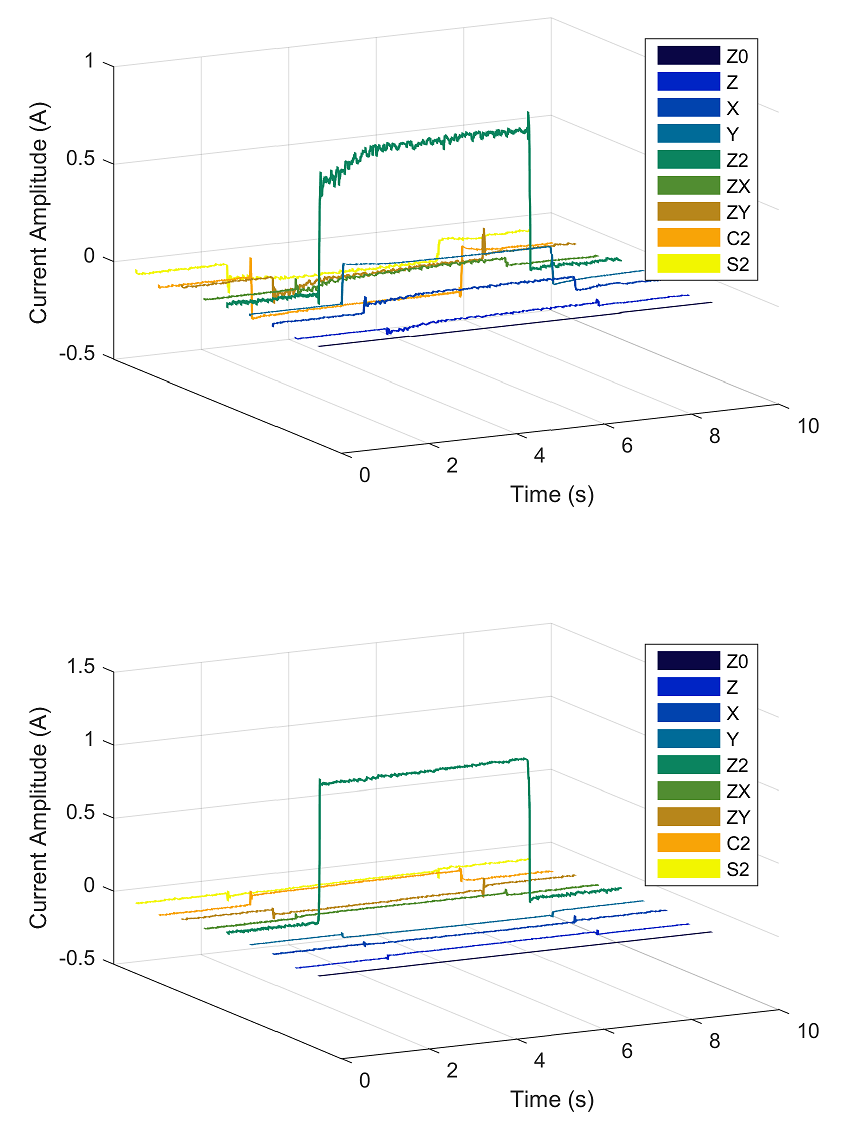
Fig. 4 shows the B0 field (for the Z2 shim term as an example) measured using the field camera when driving the shim coils with and without the pre-emphasis filter. The shim field without pre-emphasis requires a long time to settle (due to eddy current effects). On the contrary, the pre-emphasis filter corrects for the eddy currents and the current reaches its intended value almost immediately. Furthermore, the cross-terms effects have been reduced by the pre-emphasis filter.
Conclusion
Previously, only analog filters have been used for pre-emphasis. In this work, a low-cost and scalable digital pre-emphasis filter was designed and implemented on commercial off-the-shelf hardware for dynamic B0 shimming on a whole-body human 9.4T scanner. The update rate was 15us for each shim channel. The system was characterised for 3rd and 4th order B0 shimming and can easily be extended for higher-order dynamic B0 shimming.
Acknowledgements
No acknowledgement found.References
[1] Juchem C et al. Concepts in MR: B. 2010.
[2] Boer V et al. MRM. 2011.
[3] Edler & Hoult. MRM. 2008.
[4] Fillmer A et al. MRM. 2016.
[5] Young PC & Jakeman AJ. Intl. Jour. of Control. 1980.
[6] Hess RA & Siwakosit W. Jour. of Aircraft. 2001.
Figures