2683
Decoupling Controller Design for Real-time Feedback of B0 Shim Systems1MPI for Biological Cybernetics, Tuebingen, Germany, 2IMPRS for Cognitive and Systems Neuroscience, Eberhard University of Tuebingen, Tuebingen, Germany, 3Institute of Physics, Ernst-Moritz-Arndt University Greifswald, Greifswald, Germany
Synopsis
Real-time B0 feedback has been shown to be beneficial for the controlling of B0 fluctuations. However, update rates that have been reported are slow (~100ms) and either use pre-emphasis to correct for the coupling and faster dynamics of the system or only use control the frequency
We show that for faster update rates (±1ms) pre-emphasis (i.e. dynamic decoupling) is not required and that static decoupling can perform equally well or better.
Introduction
The static B0 magnetic field of MRI scanners can be measured with high-temporal resolution using NMR field cameras. Using this method, real-time feedback has been shown to be beneficial for the controlling of B0 fluctuations1-3. However, update rates that have been reported are slow (~100ms) and either use pre-emphasis to correct for the coupling and faster dynamics of the system1,2 or only use control the frequency3.
In this work, we show that for faster update rates (±1ms) pre-emphasis (i.e. dynamic decoupling) is not required and that static decoupling can perform equally well or better. This design method applies to both spherical harmonic shimming and multi-coil B0 setups4.
Theory
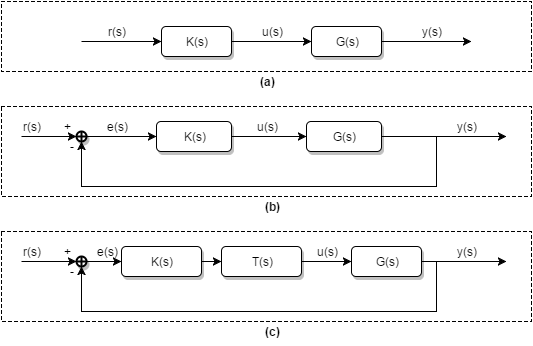
Typical feedback control systems are shown in Fig. 1. For linear time-invariant systems, the system that needs to be controlled can be represented as a transfer function G(s). The system usually needs to be identified (characterised) so that the behaviour of the system can be approximated. This is done by measuring the output y(s) by applying a known input u(s) and modelling G(s)5-7.
The controller K(s) needs to be designed such that the closed-loop response y(s) is stable, robust and has good performance. An industry standard is to use propertional-integral (PI) controllers that have the form1,8:
$$K(s) = K_P + K_I/s$$
These controllers are easy to implement and have many different tuning strategies. For multivariable systems, G(s) has multiple inputs/outputs. Decoupling is a method that tries to minimise cross-interactions and convert the system into single-input single-output (SISO).
Methods
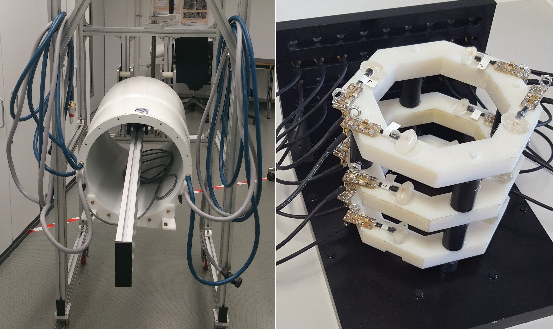
The shim system G(s) was a 28 channel insert shim from Resonance Research Inc. (Billerica, MA) that included 0th, 2nd, 3rd and 4th degree spherical harmonic terms (Fig. 2). The measurements were performed on a 9.4T Siemens whole-body human MRI scanner (Erlangen, Germany).
System identification was performed in the time-domain using step inputs of 1.0A as inputs to each shim channel and 1mT/m to each gradient. An instrument variable method was used to estimate the transfer functions9. The outputs of the system (magnetic field) were measured using a custom built 1H NMR field camera10 with TR = 25ms (Fig. 2). The outputs y(s) were the field coefficients obtained using spherical harmonic decomposition. All shim channels up to 4th degree were characterized. For proof of concept, only shim terms up to 2nd degree were used, so up to 2nd degree field coefficients were used for decomposition. Thus, the system had 9 inputs and 9 outputs.
A static and dynamic decoupling strategy for controller design were compared. The dynamic decoupling was performed using an inversion method with pole/zero mirroring and a propering filter to keep the system stable11. Dynamic decoupling is similar to pre-emphasis12-14. The static decoupling was done by inverting the steady-state values. The decoupling strategies were analysed using the mu-interaction15:
$$μ_∆ ((P_d (ω)-diag{P(ω)})(diag{P_d (ω)})^{-1})$$
where is the frequency response function (FRF), is the FRF of the decoupled system and denotes the largest singular value of the decoupling controller Δ. This interaction measure has a direct relationship to the robustness of the decoupled system15.
Optimised PI controllers were designed for each SISO self-term by minimising the open-loop phase margin (to optimise robustness) and constraining the integral-absolute-error to be less than 0.003. The controllers were converted to discrete-time using the Tustin transform and the sampling rate was assumed to be 1ms.
Results and Discussion
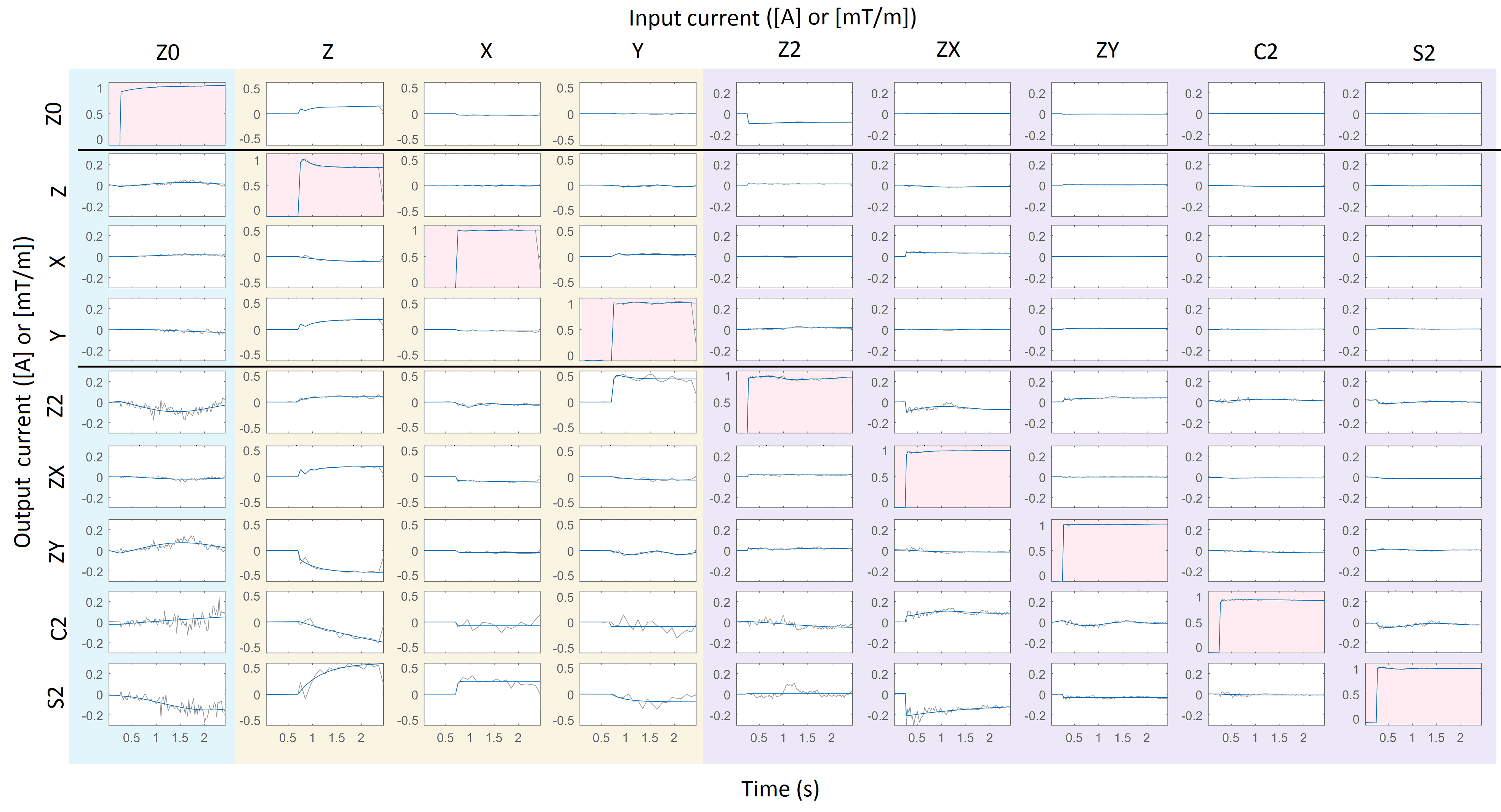
The system measurements and model are shown in Fig. 3. The models had an accuracy of at least 60% for off-diagonal terms and more than 90% for diagonals.
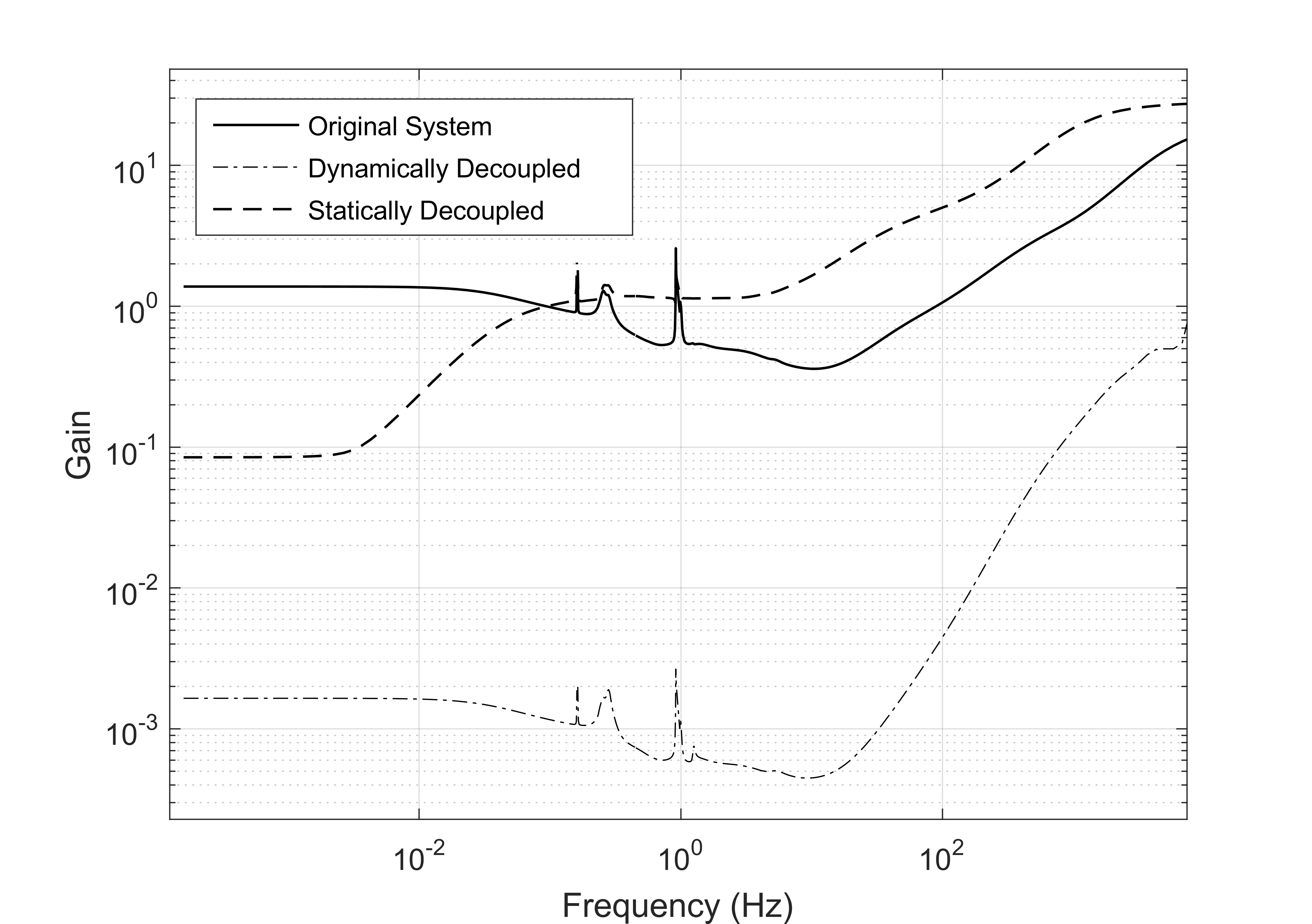
As expected, the dynamic decoupling has much lower mu-interaction as it decouples the system much better than the static decoupling (Fig. 4). However, the static decoupling decouples the system very well at low frequencies and is better than the original system up to approximately 5kHz.
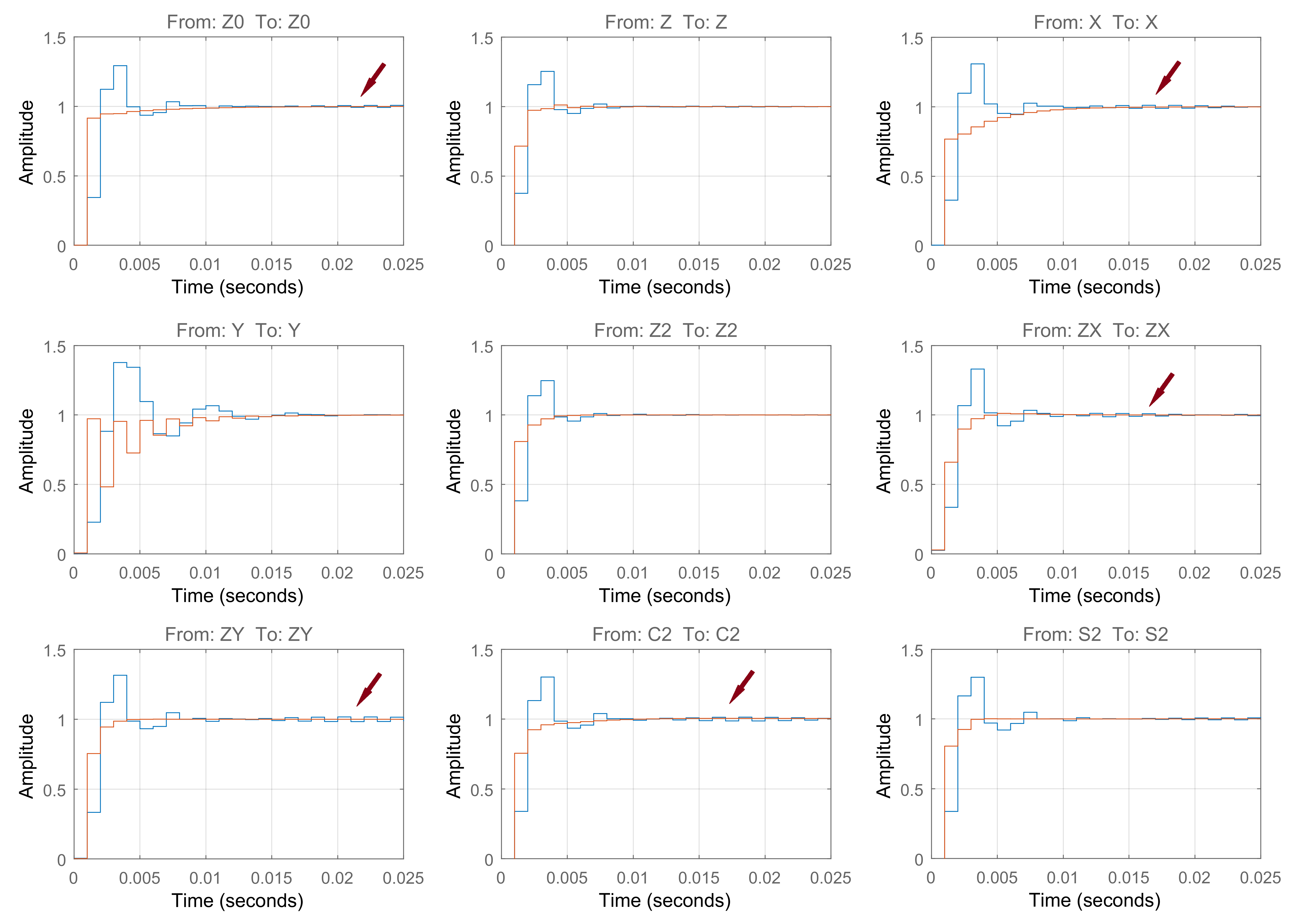
Combined with the PI controllers, the two decoupling methods are very similar in performance (Fig. 5). However, due to the high frequency performance of the dynamic decoupling and the discretisation of the system, “ringing” is introduced in the output (Fig. 5). This results in compromised robustness, which is higher for static decoupling.
Conclusion
We characterised a 2nd, 3rd and 4th degree shim system using a custom-built NMR field camera at 9.4T. Different decoupling control methods were investigated in a proof of principle study using only the 2nd degree system. Static or dynamic decoupling (i.e. preemphasis) achieve similar performance and robustness using feedback control. However, for discrete-time controllers, dynamic decoupling may yield undesirable “ringing” in the system.
Acknowledgements
No acknowledgement found.References
[1] Duerst Y et. al. MRM 2015.
[2] Wilm B et al. MRM 2014.
[3] Boer V et al. MRM 2012.
[4] Juchem C et al. JMR 2011.
[5] Oppenheim AV and Schafer RW. Digital Signal Processing (3rd ed). 2014.
[6] Vannesjo SJ et. al. MRM. 2013.
[7] Vionnet L et. al. Proc. of ISMRM 2016.
[8] Astrom KJ et. al. Instr., Sys. and Automation Soc. 1995.
[9] Young PC and Jakeman AJ. Intl. Jour. of Control. 1980.
[10] Barmet C et al. MRM. 2008.
[11] Hess RA and Siwakosit W. Jour. of Aircraft. 2001.
[12] Edler K and Hoult D. MRM. 2008.
[13] Juchem C et. al. Concepts in MR (B). 2010.
[14] Fillmer A et. al. MRM. 2015.
[15] Grosdidier P and Morari M. Automation. 1986.
Figures