1311
Motion simulation and correction validation using MR tagging1Max Planck Institute for Biological Cybernetics, Tübingen, Germany, 2IMPRS for Cognitive and Systems Neuroscience, University of Tübingen, Tübingen, Germany, 3Biomedical engineering, Amirkabir University of Technology (Tehran Polytechnic), Tehran, Iran, 4Department of Biomedical Magnetic Resonance, University of Tübingen, Tübingen, Germany
Synopsis
Involuntary subject motion is a well-known problem in MR imaging. Motion simulation is an important step to evaluate correction performance and motion induced artifacts. Here we introduce a new approach based on MR tagging to simulate desired motion pattern on a plain phantom. We employed SPAMM method to generate grid tags with a specified orientation and position. Grid tags were rotated and shifted with a desired pattern per TR. Correspondingly, the imaging slice followed the pattern to compensate the rotation and translation of the tags. Employing this approach, we could simulate motion in 5 DOF.
Introduction
Involuntary subject motion is a well-known problem in MR imaging, particularly in long functional studies which are highly sensitive to motion. Prospective motion correction (PMC) is the golden cure for this problem 1. PMC comprises two independent steps of accurate position tracking and real-time correction exerting. PMC works perfectly if the motion detection step estimates the new position precisely and then the correction interface, which is linked to the sequence, updates related imaging parameters accordingly in real-time. Therefore it is needed to evaluate both steps independently. To test the second step, MR-compatible platforms to simulate motion were reported in literatures 2,3 with one or two degree of freedom (DOF). Here we introduce a new approach based on tagging, a well-known technique widely used in cardiovascular MRI, to simulate desired motion pattern on a plain phantom. We consequently evaluate the real-time functionality of correction interface independently.Method
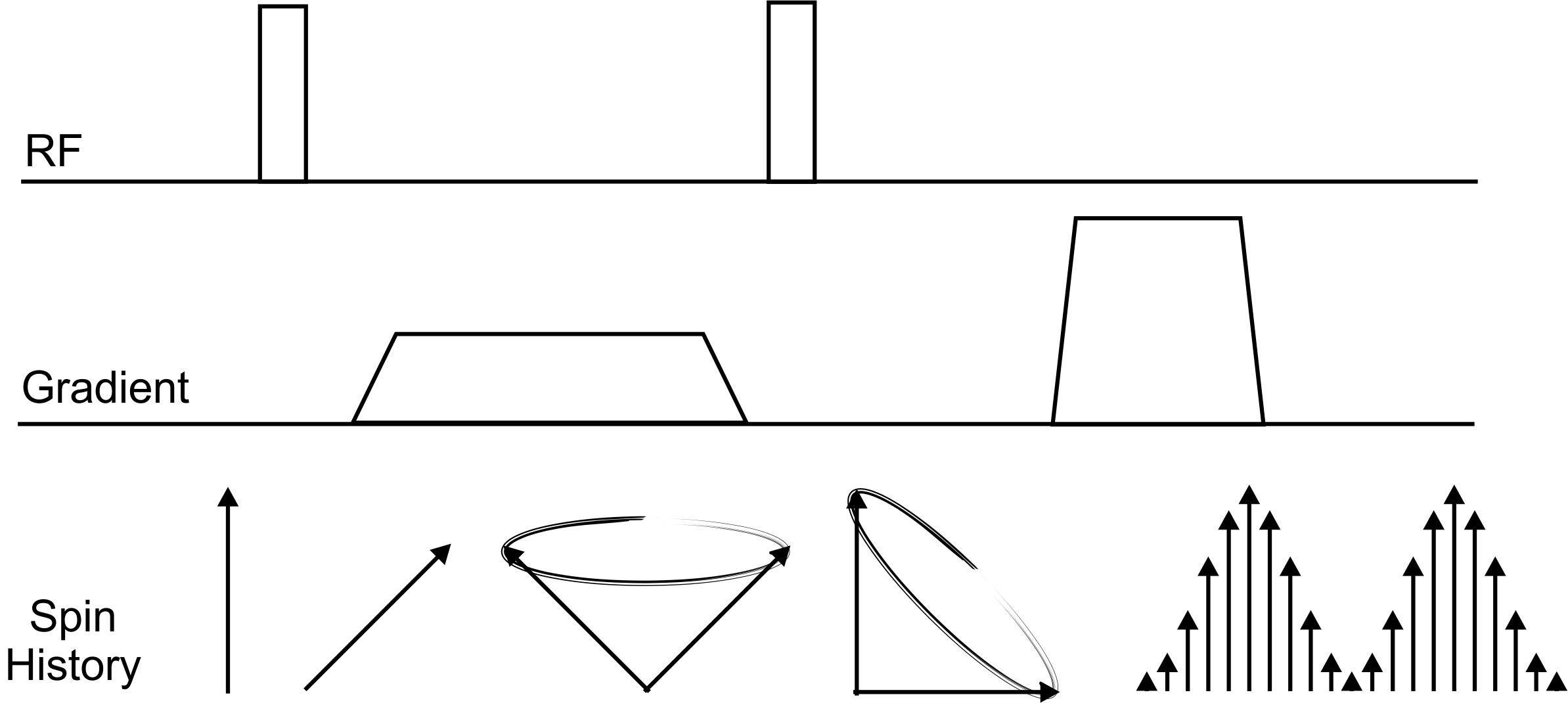
MR tagging is a technique of generating saturated regions and therefore nulling the signal over a particular pattern in the underlying volume of measurement 4,5. Here we propose to move the saturated regions, in the form of dark lines, by shifting and/or rotating them per TR. This pattern can be analogized to the internal structure of a phantom that undergoes motion. We then correct image orientation through updating gradients and excitation pulses, to counteract the induced motion. To create taglines we employed spatial modulation of magnetization (SPAMM) 5 with only two RF pulses. Figure 1 illustrates how the SPAMM sequence changes magnetization to generate a line tag pattern. The orientation of taglines is normal to the direction of modulation gradients applied between two RF pulses. Rotation around any 3D axis can be implemented in this way. To simulate translation, we shift taglines perpendicular to the lines by altering the phase of the second RF pulse. We used two sequential SPAMMs to create sets of orthogonal taglines that appear as a grid. This brings capability of shifting the taglines in both in-plane axis. The tagging pattern is renewed every hundreds of milliseconds when the saturated regions from the former pulses are vanished. In this study, we increased TR to 700ms to be able to execute preparation stage per phase encoding with different orientation or position for our grid tags.
To evaluate motion simulation and correction, we modified a GRE sequence by adding preparation pulses for tagging and embed our advanced motion correction (AMoCo) library. A single slice was acquired with TE/TR = 5/700ms. The density of taglines was set to 10mm. We tried to simulate two types of motion, one with pure rotation around 3 axes simultaneously and next with pure translation in two orthogonal directions. With the current pattern of tags used in this study, the translation simulation can’t be implemented in full 3 orthogonal axes.
Results
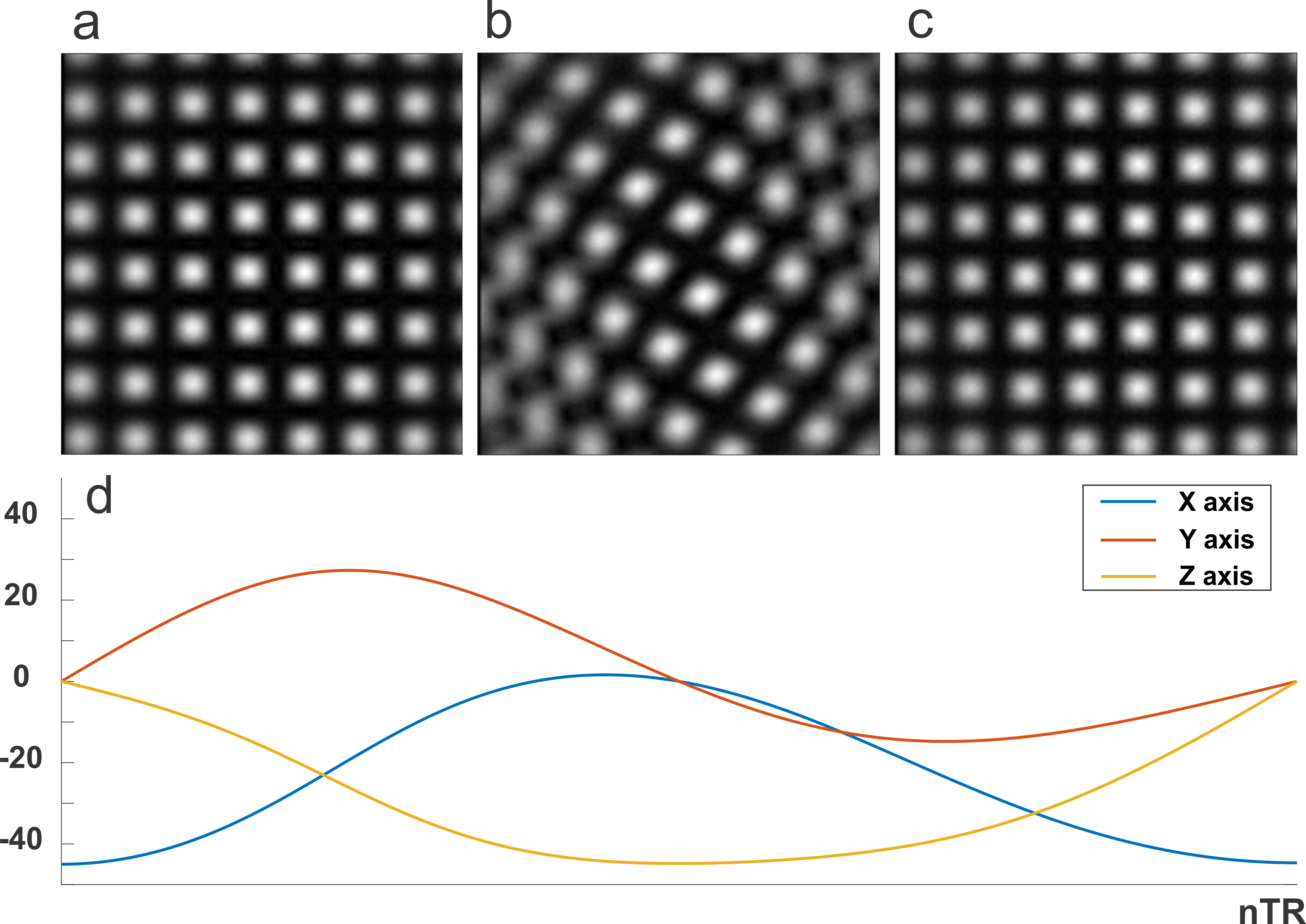
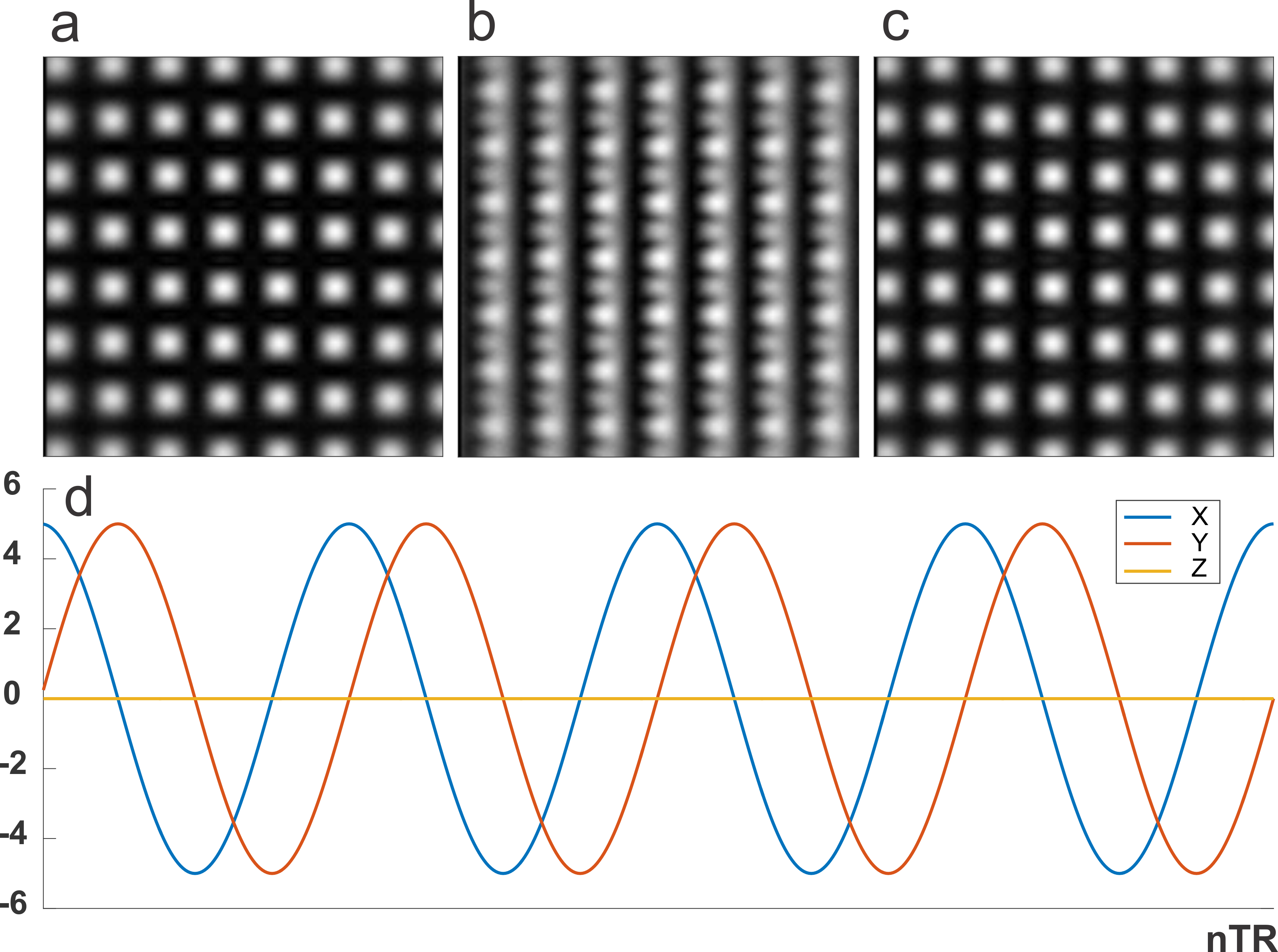
Figure 2 and Figure 3 show results of motion simulation employing grid tag pattern in the case of pure 3D rotation and pure 2D translation, respectively. Measurements were repeated three times, 1- without any simulation to get the original image (Fig.2a and Fig.3a), 2- with simulation of motion and without correction (Fig.2b and Fig.3b), and 3- with simulation of motion and enabling prospective correction (Fig.2c and Fig.3c). Pattern of rotation was saved in a text file in advance and loaded by the sequence at the beginning of the scan (Fig.2d and Fig.3d).Discussion & Conclusion
We proposed a method to virtually simulate motion. The created tag patterns play the role of the internal structure of the measured volume. Using the conventional grid tags, we can simulate motion in 5 DOF compared to other approaches that are capable of producing motion in 1or 2 DOF. There is no need to any external hardware and concerns regarding MR-compatibility of the method. Using the scanner’s hardware makes the technique highly reproducible, accurate in control and flexible in motion simulation.Acknowledgements
No acknowledgement found.References
1. O. Speck, J. Hennig, and M. Zaitsev, “Prospective real-time slice-by-slice motion correction for fMRI in freely moving subjects,” Magn. Reson. Mater. Physics, Biol. Med., vol. 19, no. 2, pp. 55–61, 2006.
2. J. Nofiele et al., “An MRI-compatible platform for one-dimensional motion management studies in MRI,” Magn. Reson. Med., vol. 76, no. 2, pp. 702–712, 2016.
3. M. A. Tavallaei, P. M. Johnson, J. Liu, and M. Drangova, “Design and evaluation of an MRI-compatible linear motion stage,” Med. Phys., vol. 43, no. 1, pp. 62–71, 2016.
4. A. Nasiraei-Moghaddam and J. Paul Finn, “Tagging of cardiac magnetic resonance images in the polar coordinate system: Physical principles and practical implementation,” Magn. Reson. Med., vol. 71, no. 5, pp. 1750–1759, 2014.
5. L. Axel and L. Dougherty, “MR imaging of motion with spatial modulation of magnetization.,” Radiology, vol. 171, no. 3, pp. 841–845, 1989.
Figures