1305
Retrospective motion correction of head rotations in 2D RARE brain images using TArgeted Motion Estimation and Reduction (TAMER)1A. A. Martinos Center for Biomedical Imaging, Department of Radiology, MGH, Charlestown, MA, United States, 2Graduate Program in Biophysics, Harvard University, Cambridge, MA, United States, 3Harvard Medical School, Boston, MA, United States, 4Harvard-MIT Division of Health Sciences and Technology, MIT, Cambridge, MA, United States
Synopsis
RARE/TSE/FSE imaging is the most common brain sequence, but can be severely degraded by patient motion. While 2D navigated versions (PROPELLER) and motion-tracking approaches exist, they are not widely used. We introduced a data-consistency based retrospective method, TAMER, whereby the image and motion parameters are jointly estimated by minimizing data consistency error of a SENSE+motion forward model. We employ reduced modeling techniques which assess only a few targeted voxels at each step to make the large non-linear estimation problem computationally achievable. We demonstrate the approach to mitigating rotations in phantom and human scans in addition to previously reported translation mitigation.
Purpose
Numerous marker and navigator motion mitigation methods have been developed1–5. Data driven approaches have also been applied using image entropy minimization6,7 and alternating minimizations8. While all successful on some level, they all have sufficient weaknesses or side-effects to preclude their widespread clinical use. Marker-based motion detection presents clinical workflow issues, MR navigator scans can disrupt sequence timings, and data driven techniques hold promise but can be computationally prohibitive or introduce assumptions about the image. To address these issues, we introduce an efficient retrospective motion correction technique without navigators or markers to improve the motion-robustness of clinical 2D RARE/TSE/FSE brain MRI.Methods
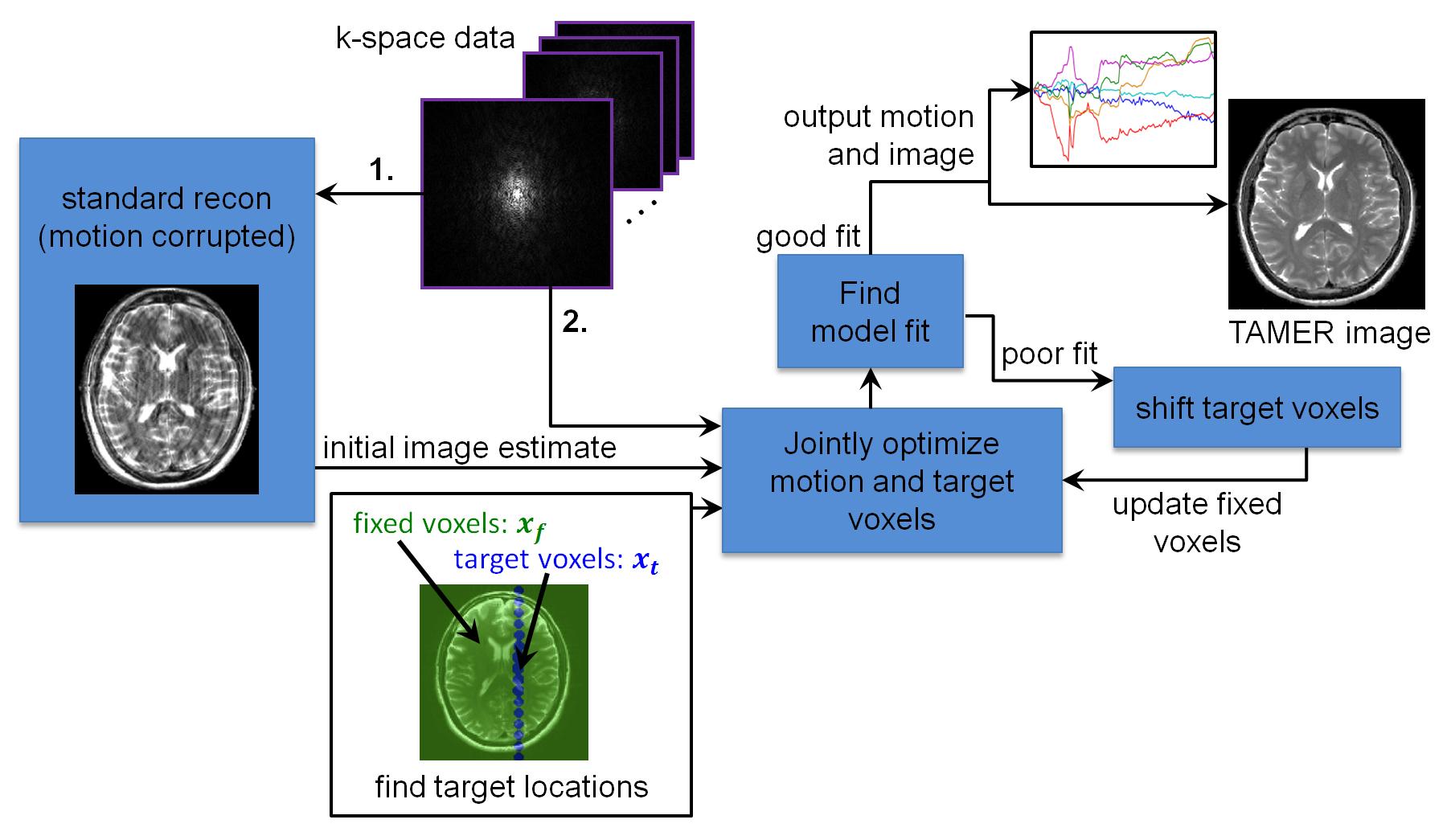
TAMER (Fig. 1) explicitly incorporates rigid-body patient motion in the MR forward model, and jointly estimates the image and motion trajectory by minimizing data consistency error. We assume a generalized SENSE9 forward model: $$$\boldsymbol{s}=\boldsymbol{E_{\theta} x}$$$, where $$$\boldsymbol{s}$$$ is the acquired signal, $$$\boldsymbol{E_{\theta}}$$$ is the motion encoding for a given motion trajectory $$$\boldsymbol{\theta}$$$, and $$$\boldsymbol{x}$$$ is the motion free image. The encoding can be expanded as:
$$\boldsymbol{E_\theta} = \boldsymbol{UFCTR}$$
where $$$\boldsymbol{C}$$$ contains the coil sensitivities, $$$\boldsymbol{F}$$$ is the Fourier encoding operator, $$$\boldsymbol{U}$$$ is the undersampling operator (allowing parallel imaging acceleration), and $$$\boldsymbol{R}$$$ and $$$\boldsymbol{T}$$$ describe the rotations and translations at each shot. Since the joint optimization (image and motion) is computationally intensive, we use a reduced model representation that jointly optimizes only small subsets of “targeted” voxels, $$$\boldsymbol{x}_t$$$, with the object position parameters (6 parameters per shot). The targeted voxels are varied during the optimization.
In the absence of motion, only a single least-squares minimization of $$$||\boldsymbol{s-Ex}||_2$$$ is needed. With motion unknowns, this becomes a more difficult non-linear estimation problem. By solving only a small targeted subset of voxels at each step the joint optimization is more computationally efficient. Breaking the image into a targeted subset, $$$\boldsymbol{x_t}$$$, and the complimentary “fixed” subset, $$$\boldsymbol{x}_f$$$, allows the signal from the targeted voxels, $$$\boldsymbol{s}_t$$$, to be isolated from the total signal (i.e. $$$\boldsymbol{s}_t = \boldsymbol{s} - \boldsymbol{s}_f$$$; here $$$\boldsymbol{s}_f$$$ is the signal contribution from the fixed voxels). The forward model evaluation for each motion estimate can be reduced to $$$\boldsymbol{s}_t=\boldsymbol{E}_{\boldsymbol{\theta},t}\boldsymbol{x}_t$$$, where $$$\boldsymbol{E}_{\boldsymbol{\theta},t}$$$ is the portion of the encoding acting only on the target voxels. The reduced model data consistency minimization is now:
$$ [\hat{ \boldsymbol{\theta} }, \hat{ \boldsymbol{x}}_t ] = \textrm{argmin}_{\boldsymbol{\theta,x_t}}||\boldsymbol{s}_t-\boldsymbol{E}_{\boldsymbol{\theta},t}\boldsymbol{x}_t||_2$$
Regularization (e.g. Tikhonov/spatial sparsity) can also be easily added.
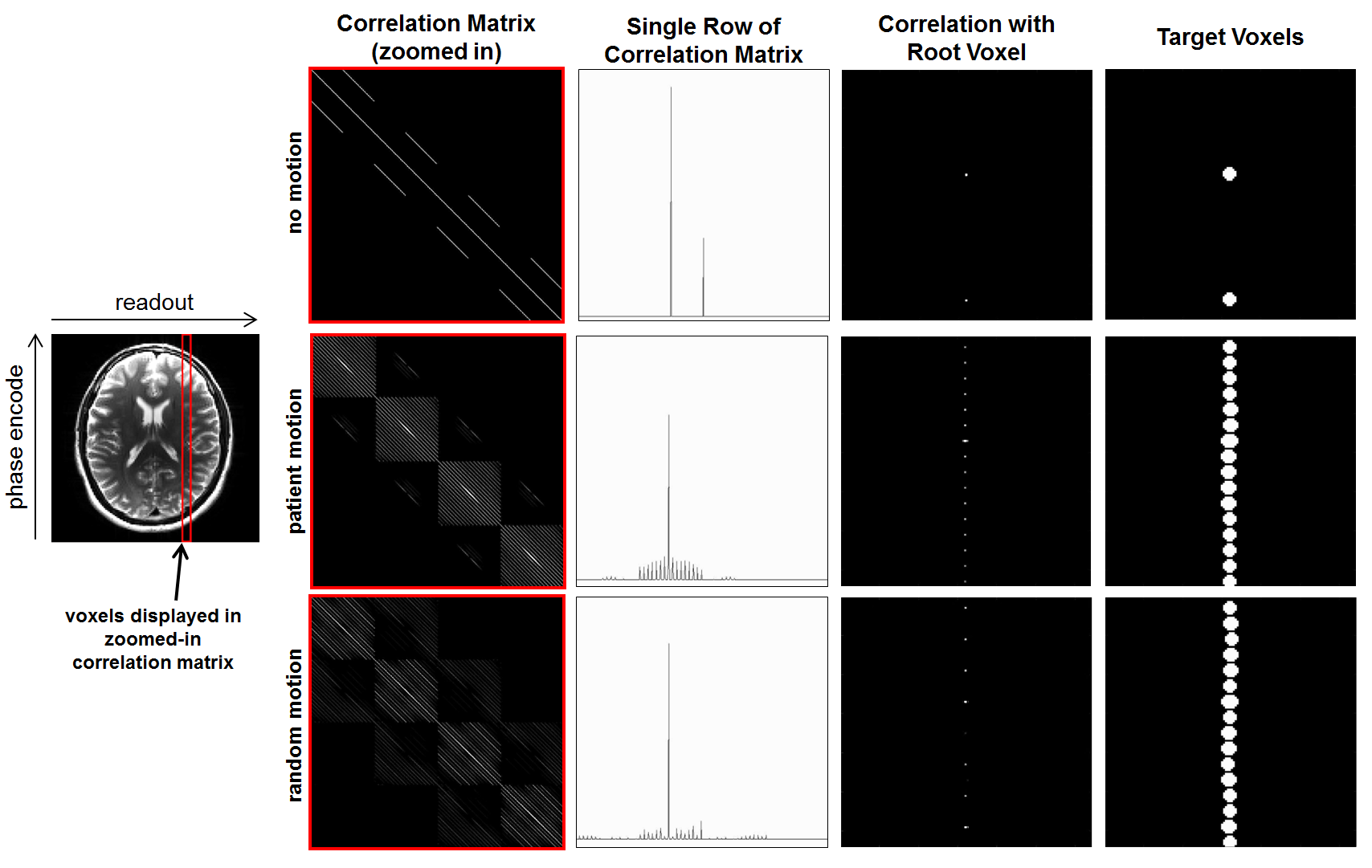
The accuracy of the reduced model depends on locality properties in the motion-inclusive encoding matrix. Target voxel coupling is examined in the correlation matrix, $$$\boldsymbol{E^HE}$$$, where sparsity arises from model separability. Fig. 2 shows a subset of $$$\boldsymbol{E^HE}$$$ for no motion, measured patient motion, and random motion, all for RARE imaging with R=2 undersampling. The measured-patient and random motion cases show very similar sparsity patterns, and therefor similar model separability. We exploit this property to find subsets of voxels that are highly coupled by adding random motion to the forward model, without a priori knowledge of the true motion trajectory.
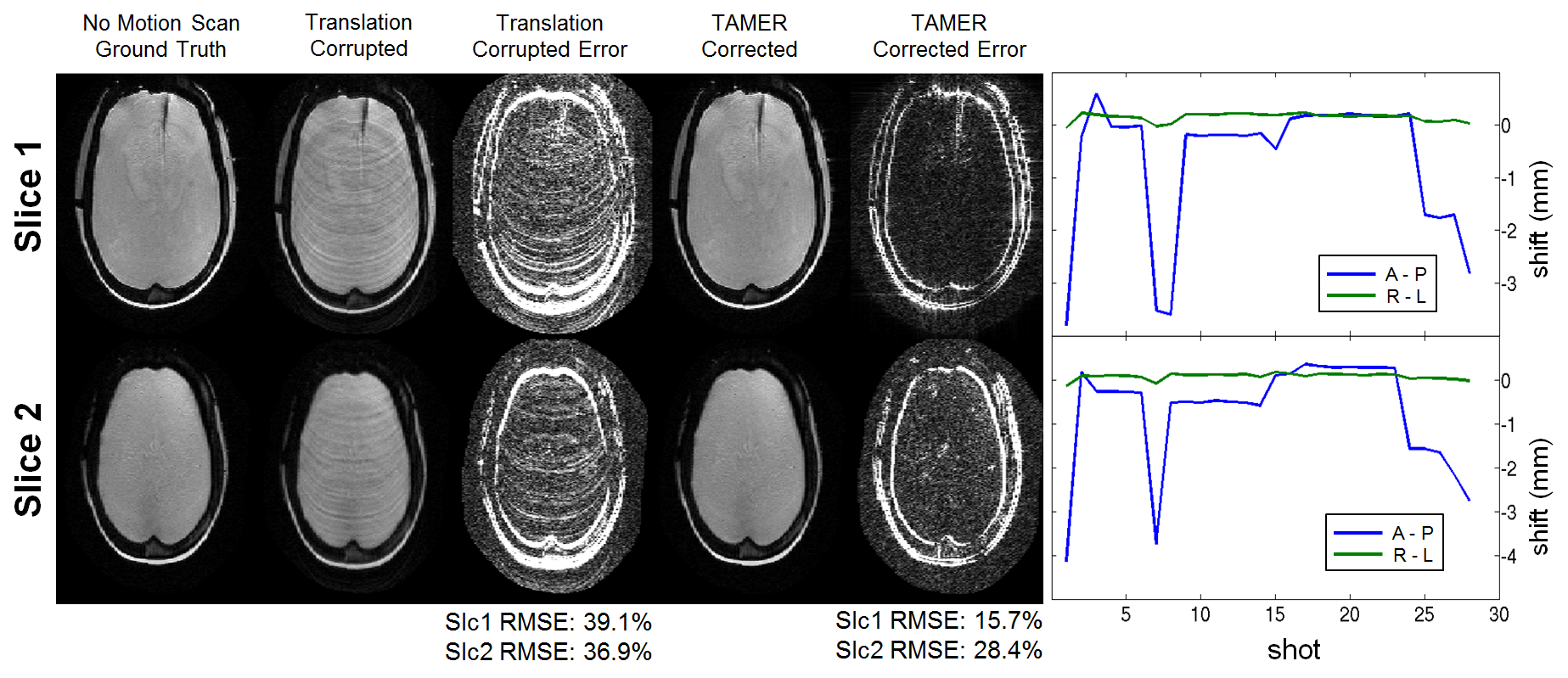
Phantom tests include an in-plane rotating pineapple phantom using a continuous motion actuator throughout the scan, approximately ±3⁰; ETL=11, 230x208 mm2 FOV, 0.6x0.6 mm2 resolution, 5mm slice thickness, TR/TE=3.8s/93ms, refocus pulse=150⁰, and R=1. TAMER was also tested on a human subject using ETL=11, 220x220 mm2 FOV, 0.9x0.9 mm2 resolution, 3mm slice thickness, TR/TE=3.0s/99ms, refocus pulse=150⁰, and R=1. The subject was asked to shake their head in a “no” gesture during the middle of the scan. Translation motion tests have been shown in previous work (Fig. 3)10.
Results
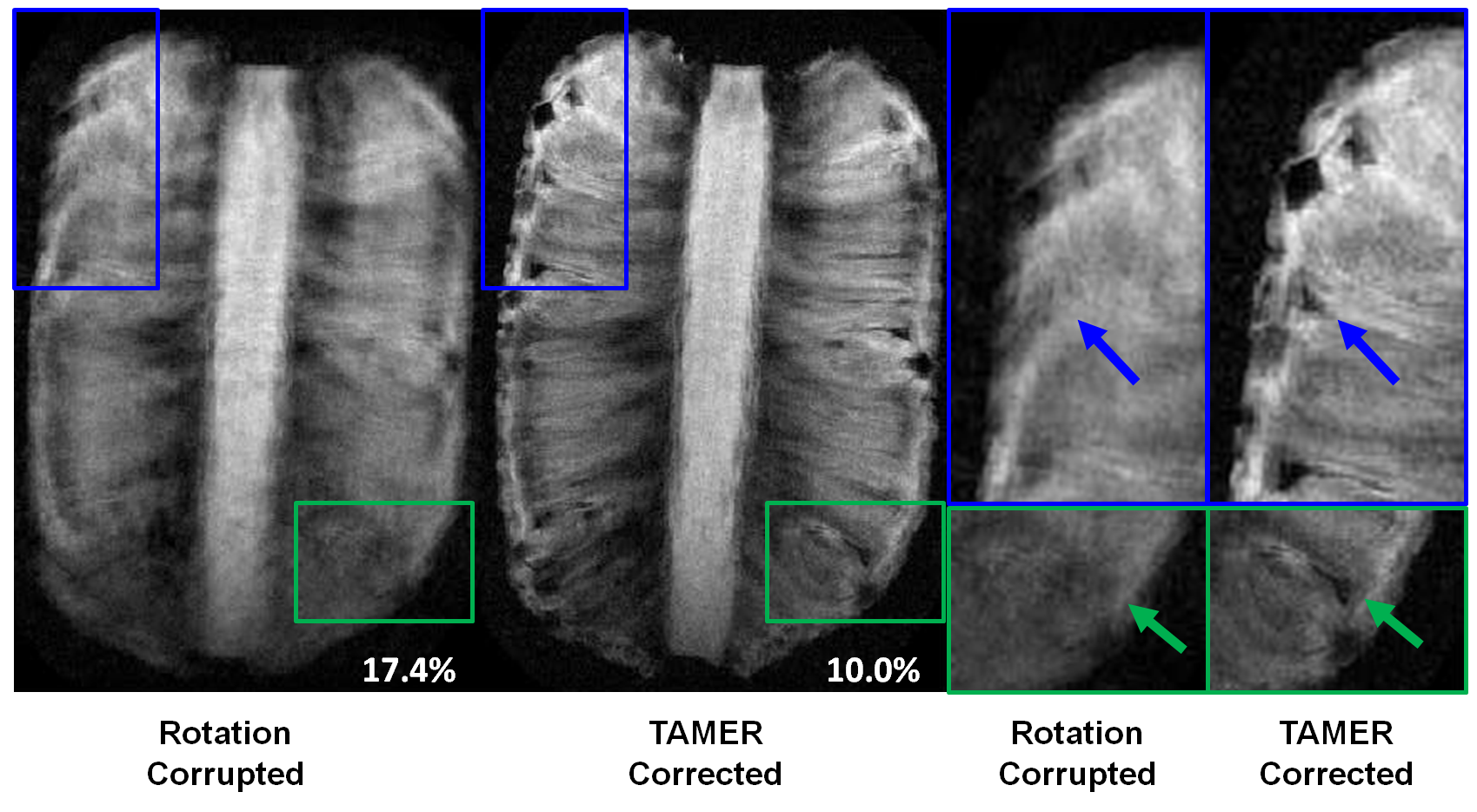
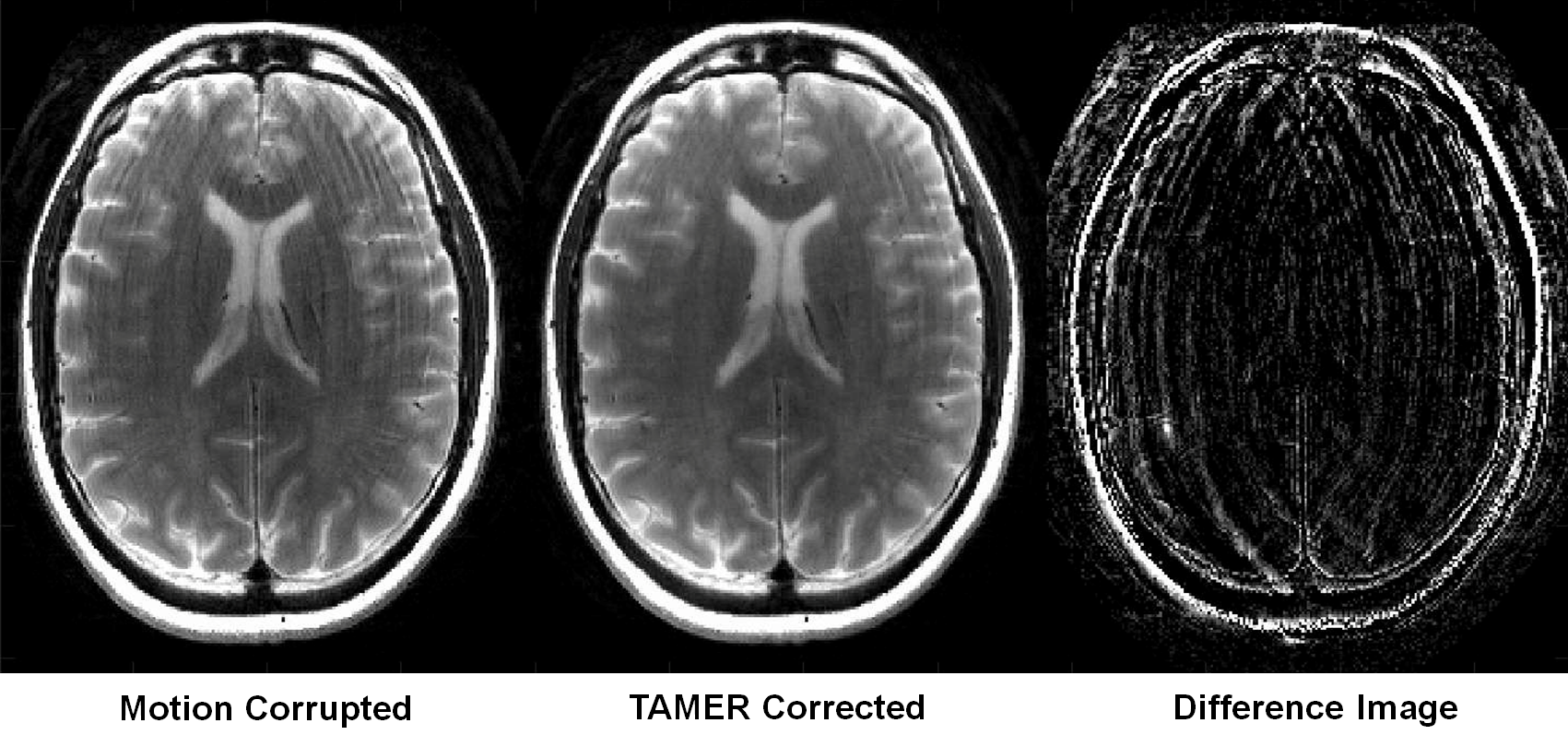
Joint reconstruction using target voxels from Fig. 2 resulted in a 7x RMSE improvement for the heavily motion-coupled voxels compared to separate reconstruction. Fig. 4 shows TAMER corrected rotating phantom images, where image space RMSE compared to a ground truth (no motion) image decreased from 17.4% to 10.0%. The TAMER reconstruction is able to resolve image features otherwise blurred by motion. Fig. 5 shows in vivo TAMER reconstructed images of a human subject with significantly reduced ringing artifacts.Discussion and Conclusions
We have demonstrated the effectiveness of TAMER for mitigating motion in rotating phantoms and moving human subjects. The method is able to estimate motion retrospectively using only parallel imaging data. We think that the 20min per slice reconstruction time (from in vivo data Fig. 5) can be significantly reduced with a GPU implementation that caches the compact rotation, translation, and DFT operators, providing an order of magnitude decrease in reconstruction time. Future work will add modeling terms for through-plane rotation and MR spin-history effects to allow TAMER to mitigate a wider range of motion in clinical settings.Acknowledgements
The authors would like to thank David Salat and Jean-Philippe Coutu for the Alzheimer's disease fMRI motion trajectories used to simulate patient motion.References
1. Maclaren J, Armstrong BSR, Barrows RT, et al. Measurement and Correction of Microscopic Head Motion during Magnetic Resonance Imaging of the Brain. PLoS One. 2012;7(11):3-11. doi:10.1371/journal.pone.0048088.
2. Pipe JG. Motion correction with PROPELLER MRI: application to head motion and free-breathing cardiac imaging. Magn Reson Med. 1999;42(5):963-969.
3. Alhamud A, Tisdall MD, Hess AT, Hasan KM, Meintjes EM, Van Der Kouwe AJW. Volumetric navigators for real-time motion correction in diffusion tensor imaging. Magn Reson Med. 2012;68:1097-1108. doi:10.1002/mrm.23314.
4. White N, Roddey C, Shankaranarayanan A, et al. PROMO: Real-time prospective motion correction in MRI using image-based tracking. Magn Reson Med. 2010;63(1):91-105. doi:10.1002/mrm.22176.
5. Gallichan D, Marques JP, Gruetter R. Retrospective correction of involuntary microscopic head movement using highly accelerated fat image navigators (3D FatNavs) at 7T. Magn Reson Med. 2015;1039:1030-1039. doi:10.1002/mrm.25670.
6. Loktyushin A, Nickisch H, Pohmann R, Schölkopf B. Blind multirigid retrospective motion correction of MR images. Magn Reson Med. 2015;73(4):1457-1468. doi:10.1002/mrm.25266.
7. Cheng JY, Alley MT, Cunningham CH, Vasanawala SS, Pauly JM, Lustig M. Nonrigid motion correction in 3D using autofocusing with localized linear translations. Magn Reson Med. 2012;68(6):1785-1797. doi:10.1002/mrm.24189.
8. Cordero-Grande L, Teixeira RPAG, Hughes EJ, Hutter J, Price AN, Hajnal J V. Sensitivity Encoding for Aligned Multishot Magnetic Resonance Reconstruction. IEEE Trans Comput Imaging. 2016;2(3):266-280. doi:10.1109/TCI.2016.2557069.
9. Pruessmann KP, Weiger M, Scheidegger MB, Boesiger P. SENSE: sensitivity encoding for fast MRI. Magn Reson Med. 1999;42(5):952-962.
10. Haskell M, Cauley S, Wald L. TArgeted Motion Estimation and Reduction (TAMER): Data Consistency Based Motion Mitigation using a Reduced Model Joint Optimization. Proc 24th Annual Meeting ISMRM, Singapore. 2016.
Figures