1302
Motion-induced Magnetic Field Changes Inside the Brain1National Institute of Neurological Disorders and Stroke, National Institutes of Health, Bethesda, MD, United States
Synopsis
In this study, changes of the B0 field inside the brain due to head motion were measured and analyzed. The sources contributing to this change include a static field introduced by the relative position of the head to the body and the shim coils, and a dynamic one from the head’s orientation and its susceptibility. The experimental results suggest that the component from the head and/or body has a strong magnitude and complex spatial pattern, which makes it difficult to be measured with simple navigators. This B0 field change should be properly taken into account for motion correction.
Introduction
Subject motion is known as a
common source of artifacts in MR images. Various techniques have been developed
to detect translation and rotation of the object for motion correction [1–4]. The B0 field inside the head can change
as a result of motion because the field distortion induced in the head by both
the susceptibility distribution in the head relative to the z-axis and the contribution
of the stationary body vary with head position. In this study, this
motion-related B0 field distortion was investigated in a series of
imaging experiments. The results suggest that motion results in a strong and complex
spatial pattern of B0 changes that have both static and dynamic
components. These B0 changes should be properly taken into account
for motion correction.Methods
MRI Experiments
Two consecutive experiments were performed on a 7T MRI scanner (Magnetom, Siemens) equipped with a 32-channel head coil (Nova Medical).
In the first experiment, a spherical oil phantom with a diameter of 16 cm was used to map the background field. A series of monopolar 5-echo 2D GRE images was acquired for measuring field maps, with an inter-echo time of 1.3 ms, TR=1.2 s, flip angle = 50°, field of view of 240x180x168 mm3 and matrix size of 120x90x84. An optimal shim for the phantom, referred to as “phantom shim”, was achieved and measured with this GRE sequence.
In the second experiment, a consenting healthy subject was recruited with an IRB-approved protocol. In this experiment, the patient bed with coil was returned to the exact position used for the phantom scan. The subject was instructed to orient his head to different directions between scans. During each scan, the aforementioned GRE sequence was used to acquire the field map and anatomy of the head for co-registration purposes. Field maps under two shim settings were obtained, one with the “phantom shim” and another with a “subject shim” optimized for the subject during the original head position.
Data Analysis
(1) The background field under the “phantom shim” was calculated and fitted to a polynomial function. (2) Field maps inside the head in different positions were derived for both “subject shim” and “phantom shim” from the GRE data. (3) The fitted background field was removed from the field maps acquired under “phantom shim”. (4) The resultant data in different head positions were aligned based on a co-registration of the GRE images.
Results
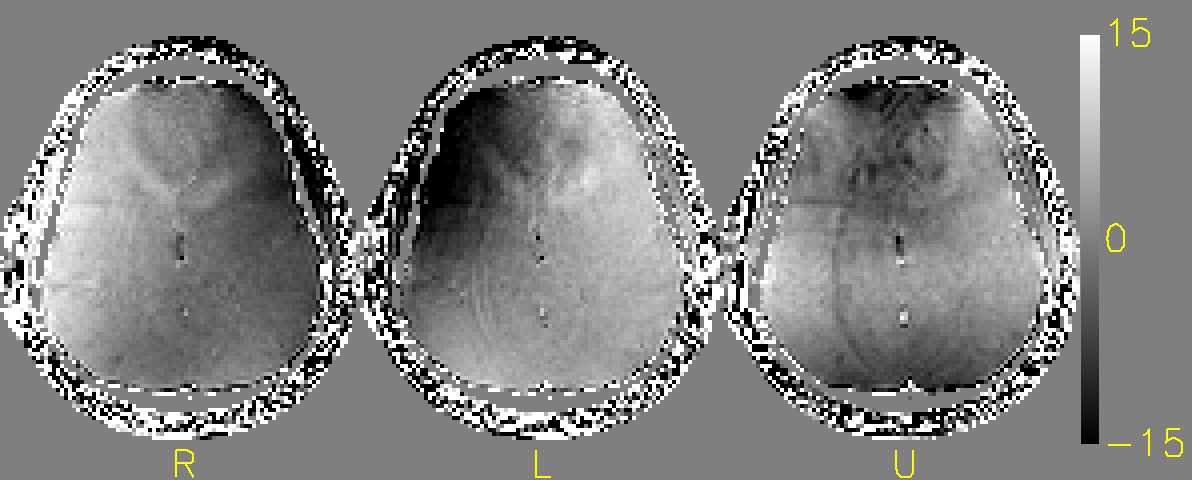
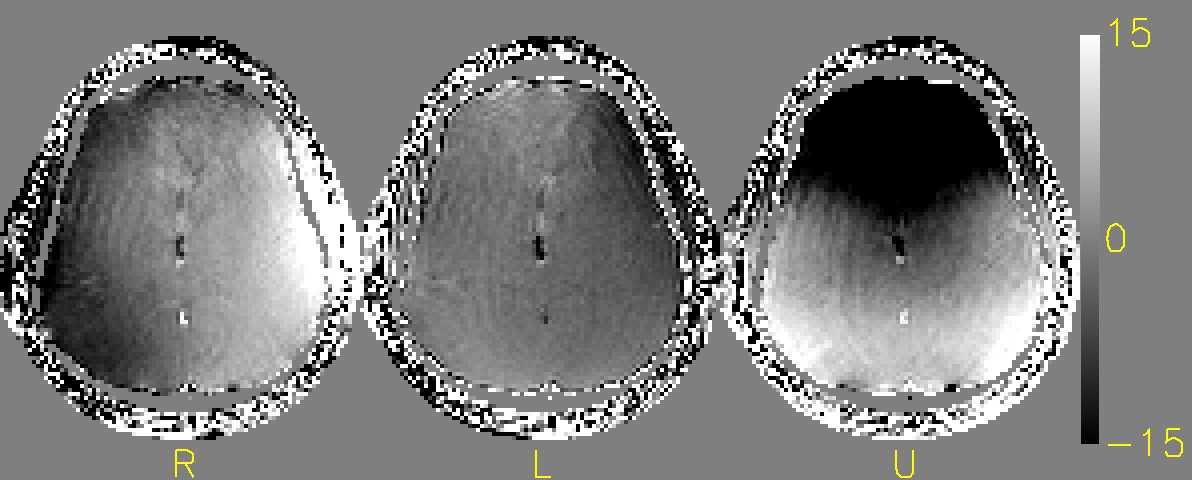
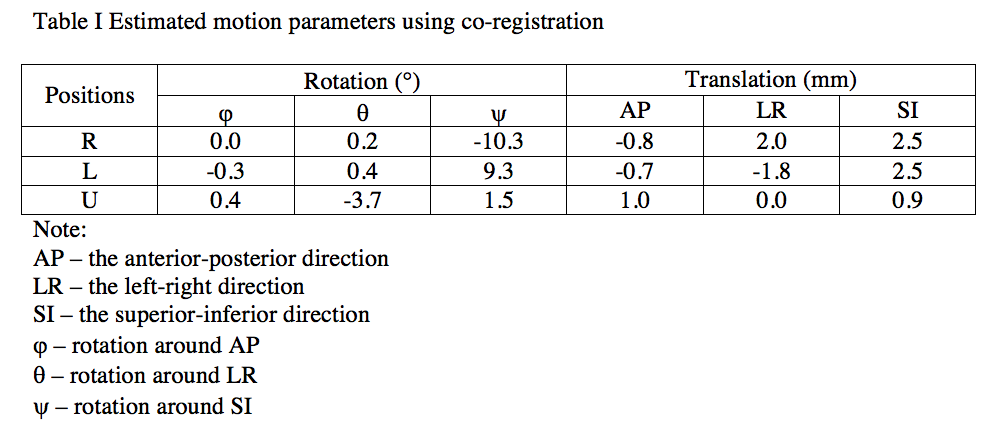
Data from three positions with the head turned to the right “R”, left “L” and tilted up “U” are shown in Fig. 1 and 2. The images were co-registered and aligned to a reference image (not shown). Rotation and translation parameters from the co-registration are shown in Table I. Fig. 1 shows the changes of the field maps relative to the reference position obtained with the “phantom shim” setting after background field being removed, and Fig. 2 shows the changes obtained with “subject shim”. Since the background field contribution has been removed, images in Fig. 1 mostly represent motion-induced field change related to the position of head and body and/or the contribution from the susceptibility of the head. For example, in the “R” and “L” positions, the field contribution is mostly attributed to the body as head rotation was mostly in the axial plane. In the frontal brain, the absolute frequency change can reach more than 15 Hz. In Fig. 2, it can be observed that the field map changes are more significant than those in Fig. 1. This can be explained by the fact that the field created by the shim coils counteracting the field originated from the subject does not move with the head.Discussion
In this study, changes of the magnetic field inside the brain as a function of head position and orientation was measured and analyzed. As shown, the sources contributing to this change include the field introduced by the intrinsic magnetic properties and posture of the subject and the field generated by the shim coils. The subject contribution includes a static field in the magnet’s frame of reference, and a dynamic one from the head susceptibility. While the effect of the shim coils can readily be accounted for with a calibration scan, the subject contribution is not straightforward to measure due to its spatial complexity as seen in Fig. 1. Nonetheless, it represents an important source of motion-related artifact because the magnitude of frequency shift (>15Hz as seen in Fig. 1) is substantially larger than the respiration-induced field fluctuation (~ 5Hz) which is a known source of artifact in various MRI applications[5-6].Acknowledgements
This work has been supported by the Intramural program of NINDS.References
[1] M. Zaitsev, C. Dold, G. Sakas, J. Hennig, and O. Speck, “Magnetic resonance imaging of freely moving objects: prospective real-time motion correction using an external optical motion tracking system,” NeuroImage, vol. 31, no. 3, pp. 1038–1050, Jul. 2006.
[2] L. Qin et al., “Prospective head-movement correction for high-resolution MRI using an in-bore optical tracking system,” Magn. Reson. Med., vol. 62, no. 4, pp. 924–934, Oct. 2009.
[3] A. J. W. van der Kouwe, T. Benner, and A. M. Dale, “Real-time rigid body motion correction and shimming using cloverleaf navigators,” Magn. Reson. Med., vol. 56, no. 5, pp. 1019–1032, Nov. 2006. [4] D. Gallichan, J. P. Marques, and R. Gruetter, “Retrospective correction of involuntary microscopic head movement using highly accelerated fat image navigators (3D FatNavs) at 7T,” Magn. Reson. Med., vol. 75, no. 3, pp. 1030–1039, Mar. 2016.
[5] P.-F. Van de Moortele, J. Pfeuffer, G. H. Glover, K. Ugurbil, and X. Hu, “Respiration-induced B0 fluctuations and their spatial distribution in the human brain at 7 Tesla,” Magn. Reson. Med., vol. 47, no. 5, pp. 888–895, May 2002.
[6] P. van Gelderen, J. a. de Zwart, P. Starewicz, R. s. Hinks, and J. h. Duyn, “Real-time shimming to compensate for respiration-induced B0 fluctuations,” Magn. Reson. Med., vol. 57, no. 2, pp. 362–368, Feb. 2007.
Figures