1301
3D Motion Estimation of Head Using Three Orthogonal Navigator Echoes and Coil Sensitivity Profiles1National Institute of Neurological Disorders and Stroke, National Institutes of Health, Bethesda, MD, United States
Synopsis
Subject motion is a common source of artifact in MRI scans. Various navigator techniques have been developed to monitor motion and correct motion artifacts. In this study, a new approach was developed to extract 3D motion information of the head based on three orthogonal 1D gradient-encoded echoes acquired in about 2 ms. Complementary positional information carried by the individual sensitivity profiles of a receive array was exploited. The method was evaluated in experiments. It suggested the estimated motion parameters were within ±0.5° and ±0.5 mm accuracy in reference to co-registered head images in various positions with rotations up to ±4°.
Introduction
Subject
motion during MRI scans can cause degradation of data quality and limit its
performance on patients prone to motion. Much effort has been dedicated to
correction of motion artifacts either with the aid of a motion monitoring
device [1-2] or using intrinsic MRI signal as a navigator [3]–[5] to track motion. Receive sensitivity profiles of a receive array can be used to provide positional information of the imaged object [6]. In this study, a new approach is proposed to extract head position
based on the sensitivity profiles of multiple receive coils in combination with three short orthogonal gradient-encoded navigator echoes. Experiments were performed to verify the accuracy and stability of the method in reference to co-registration results.Theory
In a linear (1D) gradient-encoded echo without phase encoding, translational motion of a rigid body in the gradient-encoding direction of the echo can be recorded as a space shift of its profile in the image domain. Because of the limited view of sensitivity of local receive coils, it can be assumed that small rotational motion of the rigid body can appear as translational motion detected by a particular receive coil. Based on this small-rotation assumption, the profile shifts of the recorded echoes on a receive coil can be approximated as a linear combination of the effects of both translation in the encoding direction and rotation which happens around the two orthogonal directions of the encoding gradient as
$$s_{n,c}\approx\sum_{i\neq{n}}k_{ic}R_{i}+T_n [1]$$
where $$$s_{n,c}$$$ denotes the profile shift of a navigator echo recorded along direction $$$\bf{n}$$$ on coil $$$\it{c}$$$, $$$R_i$$$ rotation around axes orthogonal to $$$\bf{n}$$$, $$$k_{ic}$$$ the coefficient translating rotation to the navigator’s profile shift, and $$$T_n$$$ translation of the object in $$$\bf{n}$$$.
Methods
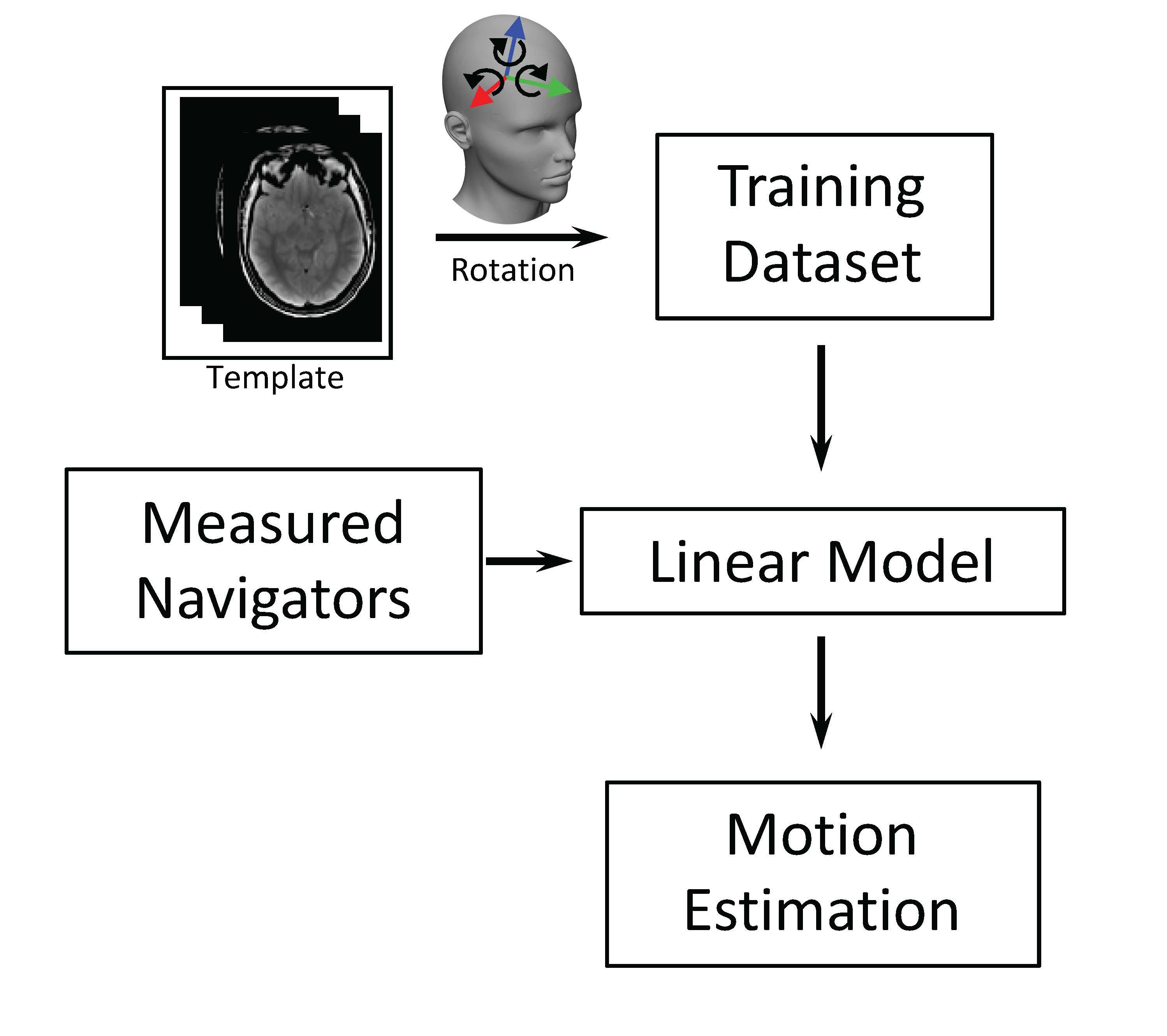
The
general scheme of the proposed method is shown in Fig. 1. First, to estimate the
coefficients $$$k_{ic}$$$, a volumetric
template image was measured in a preparation scan. The template was rotated
along the three Cartesian axes individually in calculation to generate a
training dataset. The expected rotation-induced profile shift of a navigator
along a specific direction acquired with a specific coil was calculated based on this
training dataset. The outcome of profile shift was used to calculate $$$k_{ic}$$$ with least-square fit of
the linear model. The
assumed linearity between the shift and rotation angle was used as a criterion
to include navigator echoes and receive coils for motion estimation in the second step. Secondly, using these $$$k_{ic}$$$,
real head rotation and translation were calculated based on the profile shift of
the measured navigator data.
A consented healthy volunteer was recruited in the study for evaluating the method with an IRB-approved protocol. The experiment was performed on a 7T MRI scanner (Magnetom, Siemens) equipped with a 32-channel receive array head coil (Nova Medical). The template image was acquired using a GRE scan with TE=2.55 ms, TR=1.2 s, flip angle=50°, field of view of 240x180x160 mm3 and matrix size of 120x90x80. The subject was instructed to move his head to different positions. A series of navigator scans was performed with the same parameters of the template image except that three navigator echoes were acquired with TEs of 2, 2.6 and 3.3 ms in three orthogonal directions, respectively. For each head position, a separate GRE reference image was acquired for the purpose of co-registration to evaluate the accuracy of the proposed motion detection algorithm.
Results
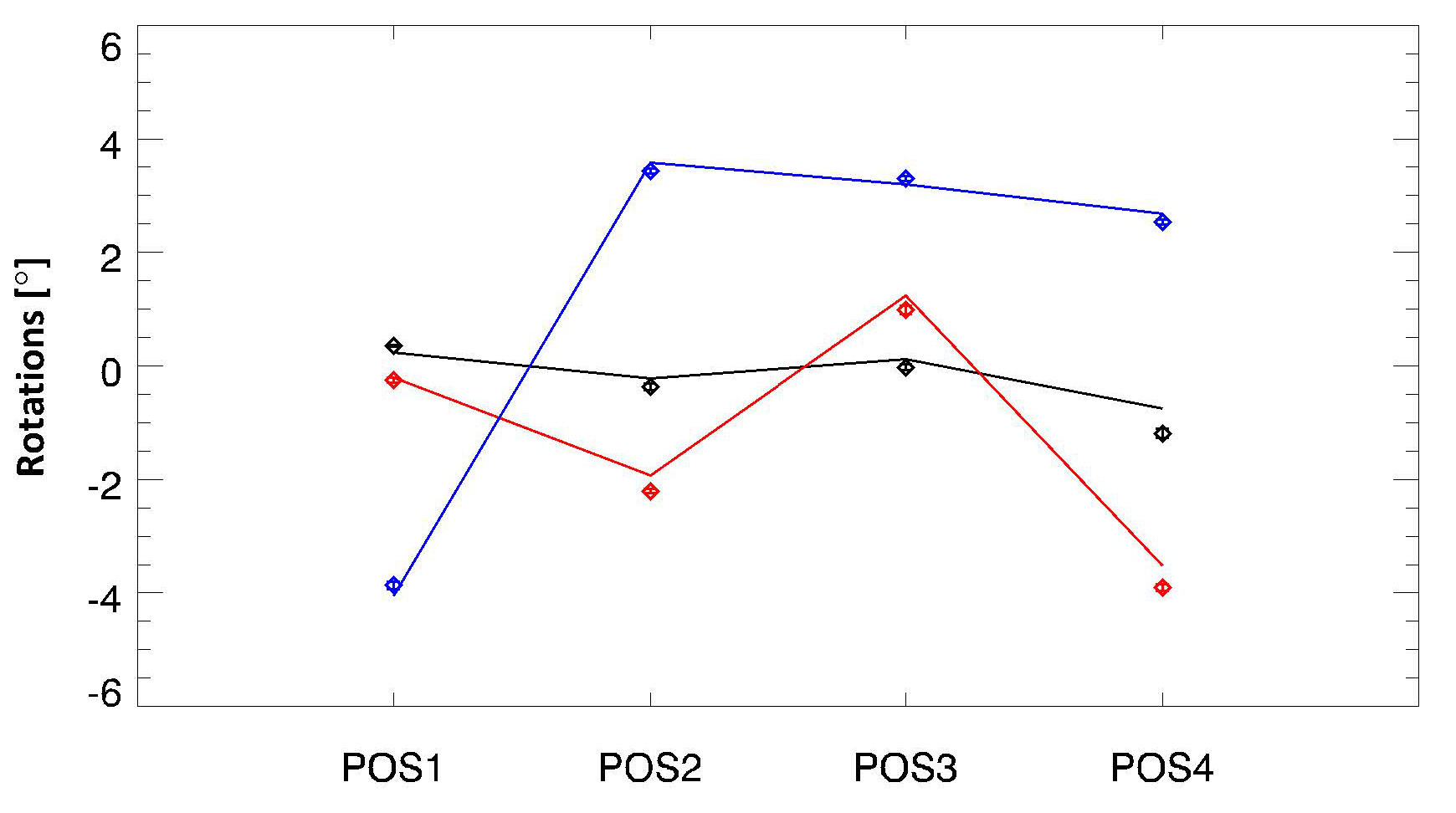
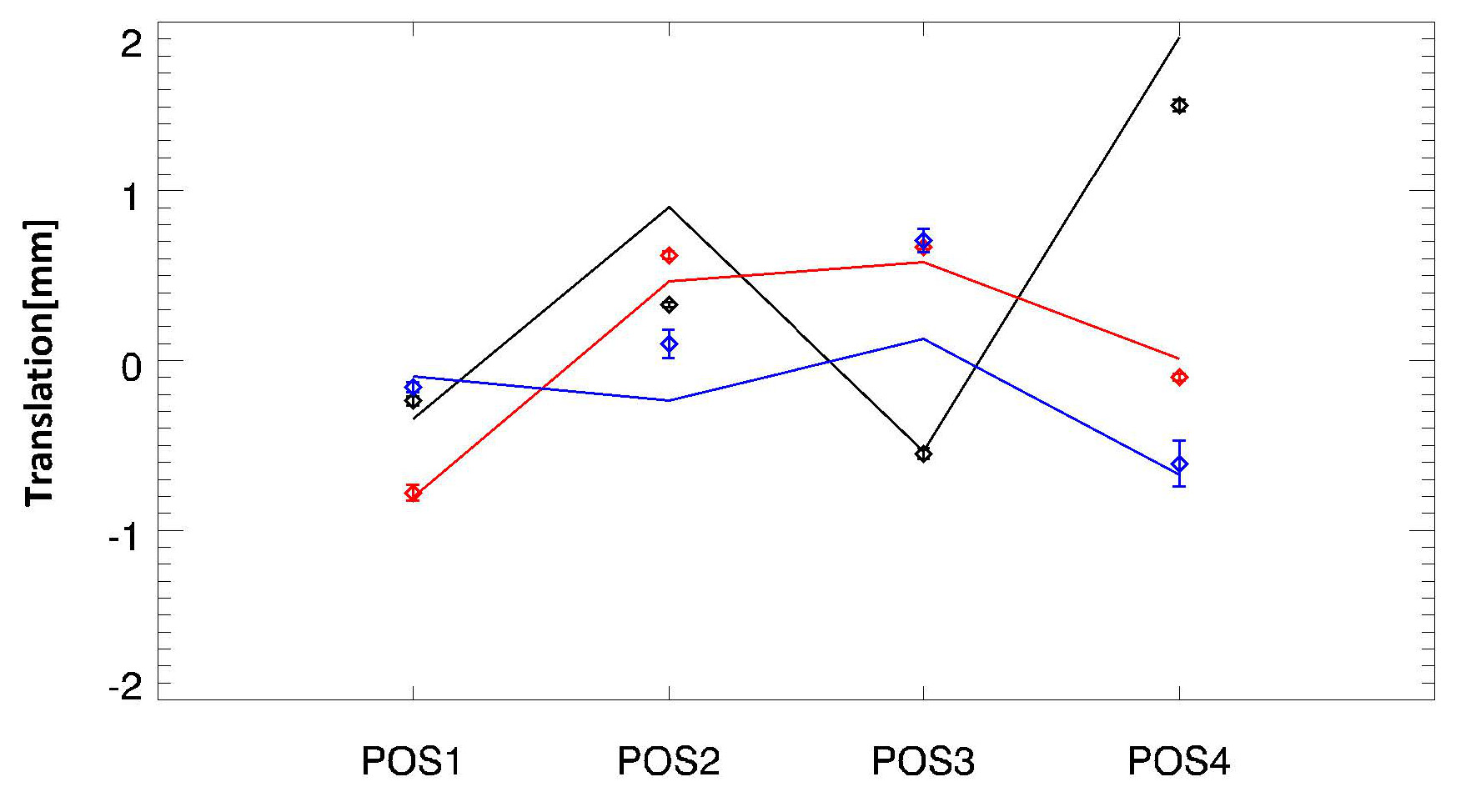
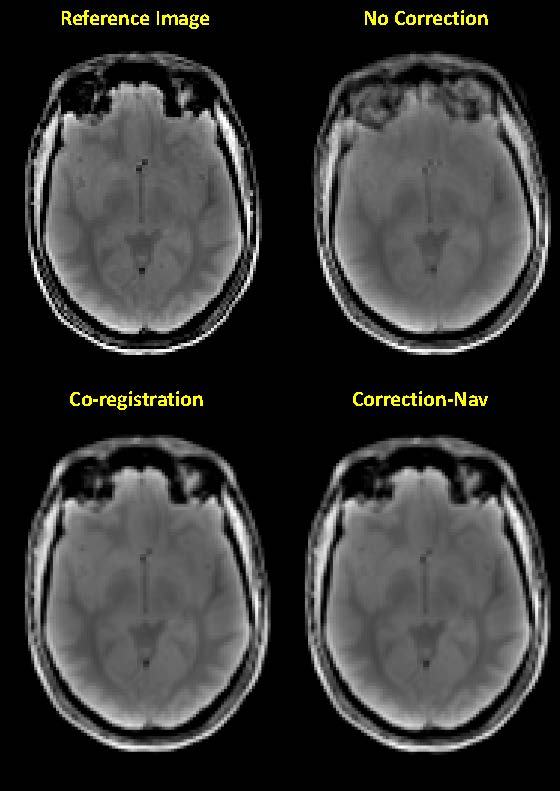
The estimated head motion in four positions using the navigator echoes and template image is shown in Fig. 2 and 3. As can be seen, estimation using the proposed approach agrees well with the co-registration results, within 0.5° and 0.5 mm deviation from the latter. Instability of the estimation due to instrument drift, physiological artifacts and thermal noise is indicated by error bars, which are mostly unnoticeable. The motion parameters were applied to transform the reference images in the four positions back to the initial position. Averaged images of the transformed reference images with different motion parameters were shown in Fig. 4. With the measured image in the initial position as a reference, it can be observed that motion correction based on the proposed method was able to remove motion artifacts and recover lost gray-white matter contrast, especially at the front of the head, obtaining similar performance as the co-registration.Conclusion
In this study, it was shown that using three simple orthogonal 1D navigators, multiple receive coils and a template image, it is possible to accurately estimate 3D head motion. The simple navigator scheme with a total duration of ~2 ms allows for practical implementation in most imaging techniques.Acknowledgements
This work has been supported by the Intramural program of NINDS.References
[1] M. Zaitsev, C. Dold, G. Sakas, J. Hennig, and O. Speck, “Magnetic resonance imaging of freely moving objects: prospective real-time motion correction using an external optical motion tracking system,” NeuroImage, vol. 31, no. 3, pp. 1038–1050, Jul. 2006.
[2] L. Qin et al., “Prospective head-movement correction for high-resolution MRI using an in-bore optical tracking system,” Magn. Reson. Med., vol. 62, no. 4, pp. 924–934, Oct. 2009.
[3] E. B. Welch, A. Manduca, R. C. Grimm, H. A. Ward, and C. R. Jack, “Spherical navigator echoes for full 3D rigid body motion measurement in MRI,” Magn. Reson. Med., vol. 47, no. 1, pp. 32–41, Jan. 2002.
[4] A. J. W. van der Kouwe, T. Benner, and A. M. Dale, “Real-time rigid body motion correction and shimming using cloverleaf navigators,” Magn. Reson. Med., vol. 56, no. 5, pp. 1019–1032, Nov. 2006.
[5] D. Gallichan, J. P. Marques, and R. Gruetter, “Retrospective correction of involuntary microscopic head movement using highly accelerated fat image navigators (3D FatNavs) at 7T,” Magn. Reson. Med., vol. 75, no. 3, pp. 1030–1039, Mar. 2016.
[6] M. Babayeva et al., “Accuracy and Precision of Head Motion Information in Multi-Channel Free Induction Decay Navigators for Magnetic Resonance Imaging,” IEEE Trans. Med. Imaging, vol. 34, no. 9, pp. 1879–1889, Sep. 2015.
Figures