1272
Joint Reconstruction of Simultaneous PET/MR Imaging with Motion Correction Using a B-spline Motion Model1Department of Engineering Physics, Tsinghua University, Beijing, People's Republic of China, 2Key Laboratory of Particle and Radiation Imaging, Ministry of Education, Medical Physics and Engineering Institute, Department of Engineering Physics, Tsinghua University, Beijing, People's Republic of China
Synopsis
Joint Reconstruction (JR) is an important approach to utilize the similarity of PET and MRI in simultaneous PET/MR imaging. For now, almost all the JR models ignore the effect of motion during scan, leading to blurring in images. We propose a motion correction method under the framework of JR, assuming that PET images and MRI images share exactly the same motion field and using a B-spline free deformation model to describe the motion. Both simulation and patient study show that the proposed method can reduce the blurring caused by motion in PET and MR images.
Purpose
Although state-of-the-art PET/MRI provides the opportunity for simultaneous data acquisition from different modalities, more researches are necessary on how to reach the full potential of PET/MRI by integrating their information. One of the attempts is joint reconstruction (JR) of PET and MRI. Most JR methods exploit inherent similarity between PET and MRI. Such similarity can either be structural similarity1 or joint sparsity under the same sparsifying transformation2. It is worth noting that the effect of motion is ignored in all these models, which is, however, one of the most significant causes of image blurring in whole-body PET/MRI. To address this problem, this work tries to extend structural similarity to similarity in motion between images of PET and MRI and proposes a method of joint reconstruction with motion correction (JRMC).Theory and Methods
Under the assumption that the noise of MRI data is Gaussian and the noise of PET data is Poisson, following the similar derivation in [1], the JRMC problem can be formulated as a nonlinear optimization problem to minimize the following cost function.
$$J=\sum_t\{\sum_j[(AM(x,\omega_t))_j-f_{j,t}\log(AM(x,\omega_t))_j]+\frac{1}{2\sigma^2}||BM(y,\omega_t)-k_t||_2^2\}+\alpha U(x,y) + \beta V(\omega)$$
In the cost function, $$$x$$$ and $$$y$$$ are PET and MRI images in the reference frame respectively, $$$f$$$ is the PET sinogram data and $$$k$$$ is the k-space data of MRI. Indices of time frame and LOR (lines of response) of PET are denoted as $$$t$$$ and $$$j$$$, respectively. $$$A$$$ is the PET imaging operator which can include geometric projection, attenuation correction and normalization, and $$$B$$$ is the MRI imaging operator consisting of under sampling, Fourier transform and coil sensitivity encoding, in parallel imaging. $$$M$$$ is the motion transformation operator parameterized by $$$\omega$$$. Parameter varies with different motion models, which was chosen to be the B-spline free deformation model in this study. Therefore, $$$\omega$$$ is the control point grid of B-spline. $$$\sigma$$$ is the standard deviation of the noise of the MRI data. The last two terms in the cost function are regularization. $$$U$$$ is the JTV (joint total variation) of PET and MRI images1, which prefers the two modalities to share the same structure features, especially the edges in the images. $$$V$$$ is the regularization term for motion parameters. In this study, the Laplace regularization was chosen, i.e.
$$V(\omega)=\sum_t||\Delta\omega_t||_2^2$$
This regularization is based on the prior that the motion in the model is smooth. $$$\alpha$$$ and $$$\beta$$$ are regularization parameters.
To validate the proposed JRMC method, we performed both simulation and patient studies. Simulation studies were performed using an XCAT phantom3, with respiratory motion. The simulation data were equivalent to a 9-min PET scan with 0.5 mCi injection dose. The simultaneous MRI simulation was performed with standard GRE sequence (TR = 9.56 ms, TE = 2.4 ms, flip angle = 12° and x3 acceleration). In addition, a patient study was performed on a whole-body simultaneous PET/MR scanner (Biograph mMR, Siemens Medical Systems, Erlangen, Germany). 7.38 mCi 18F-FDG was injected. First, an attenuation map for PET reconstruction was acquired using Dixon sequence and segmentation-based method. This was followed by a 9.5-min simultaneous PET/MRI scan. A golden angle Radial VIBE data set was acquired with TR = 4.01 ms, TE = 1.94 ms and flip angle = 12°. PET list-mode data were acquired in the meantime.
Results
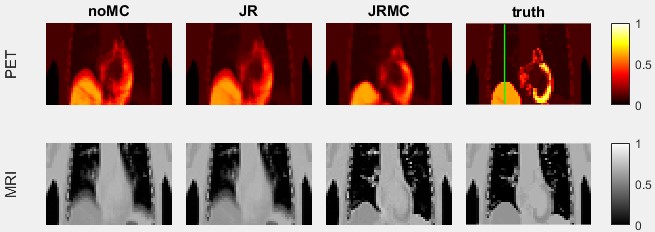
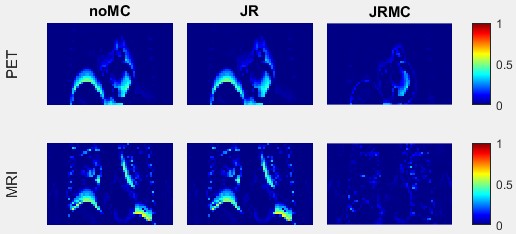
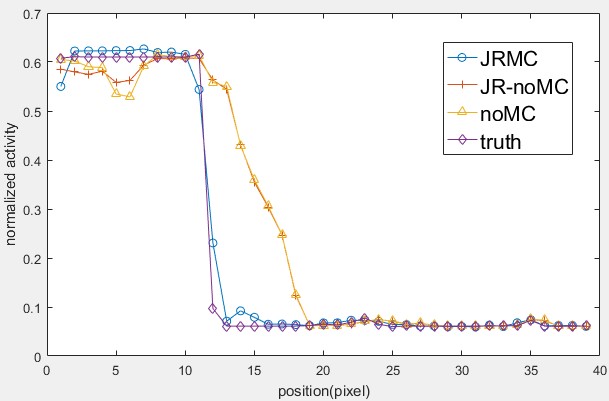
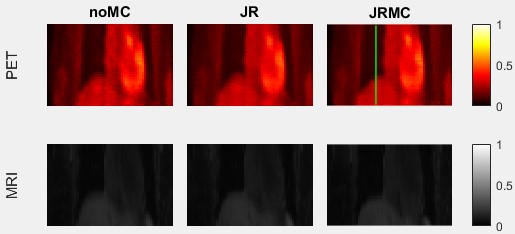
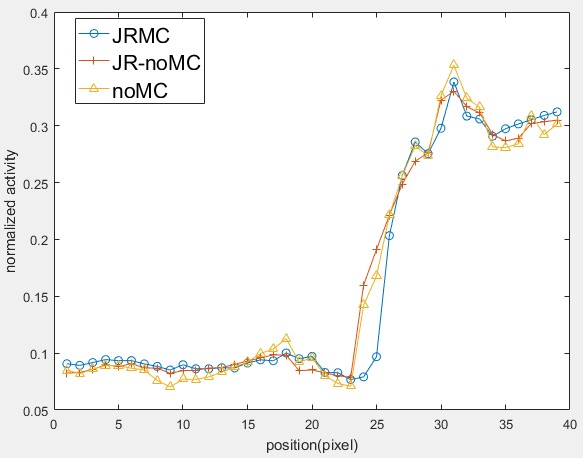
Fig 1 shows the coronal slices of PET and MR images reconstructed with 3 difference methods (no joint reconstruction and motion correction, joint reconstruction without motion correction and joint reconstruction with motion correction) and the ground truth images. Fig 2 shows the error maps between reconstructed images and the ground truth. The profiles of the green line in the PET image shown in Fig 1 are displayed in Fig 3. Fig 4 shows the PET and MR images of reconstructed from patient data and Fig 5 shows the line profiles.Discussion and conclusion
The proposed PET/MRI reconstruction method allows motion correction in joint reconstruction. The results show that the proposed method can reduce the blurring caused by motion in PET and MR images. In addition, the proposed model is flexible, for it is suitable for various MRI trajectories and different motion models.Acknowledgements
No acknowledgement found.References
1. Ehrhardt M J, Thielemans K, Pizarro L, et al. Joint reconstruction of PET-MRI by exploiting structural similarity. Inverse Problems, 2015, 31(1): 015001.
2. Knoll, F, et al. Simultaneous MR-PET Reconstruction using Multi Sensor Compressed Sensing and Joint Sparsity. Proc. Intl. Soc. Mag. Reson. Med, 2014, 22:82
3. W. P. Segarsa, et al. 4D XCAT phantom for multimodality imaging research. Med. Phys, Sep 2010, 37 (9).
Figures