0306
Simultaneous prospective motion correction and feedback field control: T2* weighted imaging at high field1ITET, IBT, UZH & ETHZ, Zurich, Switzerland, 2TNU, UZH & ETHZ, Zurich, Switzerland
Synopsis
T2* weighted imaging, which is particularly relevant in studying dementia, is prompt to artefacts caused by subject-induced field fluctuation and head motion. Solutions have been proposed to tackle each of these issues separately. In this work we propose to address the two issues concurrently with feedback field control and marker-based prospective motion correction based on gradient-tones. We demonstrate the effectiveness of the combination in the scenario of limb motion.
Introduction
T2* weighted imaging at high field is especially relevant in the study of neurodegenerative disorders (vanBergen2016). T2* weighted imaging is also known to be very sensitive to perturbations and requires excellent cooperation from the subject to achieve high-quality data. In practice, however, dementia patients have difficulties lying still and being cooperative over long MRI exams (1). Reduced cooperation translates into both field fluctuations, particularly due to breathing (2) or limb motion, as well as motion of the head itself (1). Patient-induced field fluctuation and head motion frequently coincide. It is therefore of great interest to correct for both types of perturbations concurrently.
Real-time field control was shown to effectively reduce field perturbations caused by respiration (3). Prospective motion correction (PMC) was shown to effectively correct for motion in brain MRI (4).
Performing real-time PMC and real-time feedback field control simultaneously is technically challenging. Both methods are sophisticated in terms of measurement, require real-time computation on shared infrastructure and manipulate gradient fields dynamically. Moreover, using a closed feedback loop field control is potentially unstable in the presence of console-driven field changes and related eddy currents resulting from sequence updates.
On this basis, the goal of the present work is to implement and explore the feasibility of simultaneous real-time correction of both head motion and patient-induced field perturbation.
Method
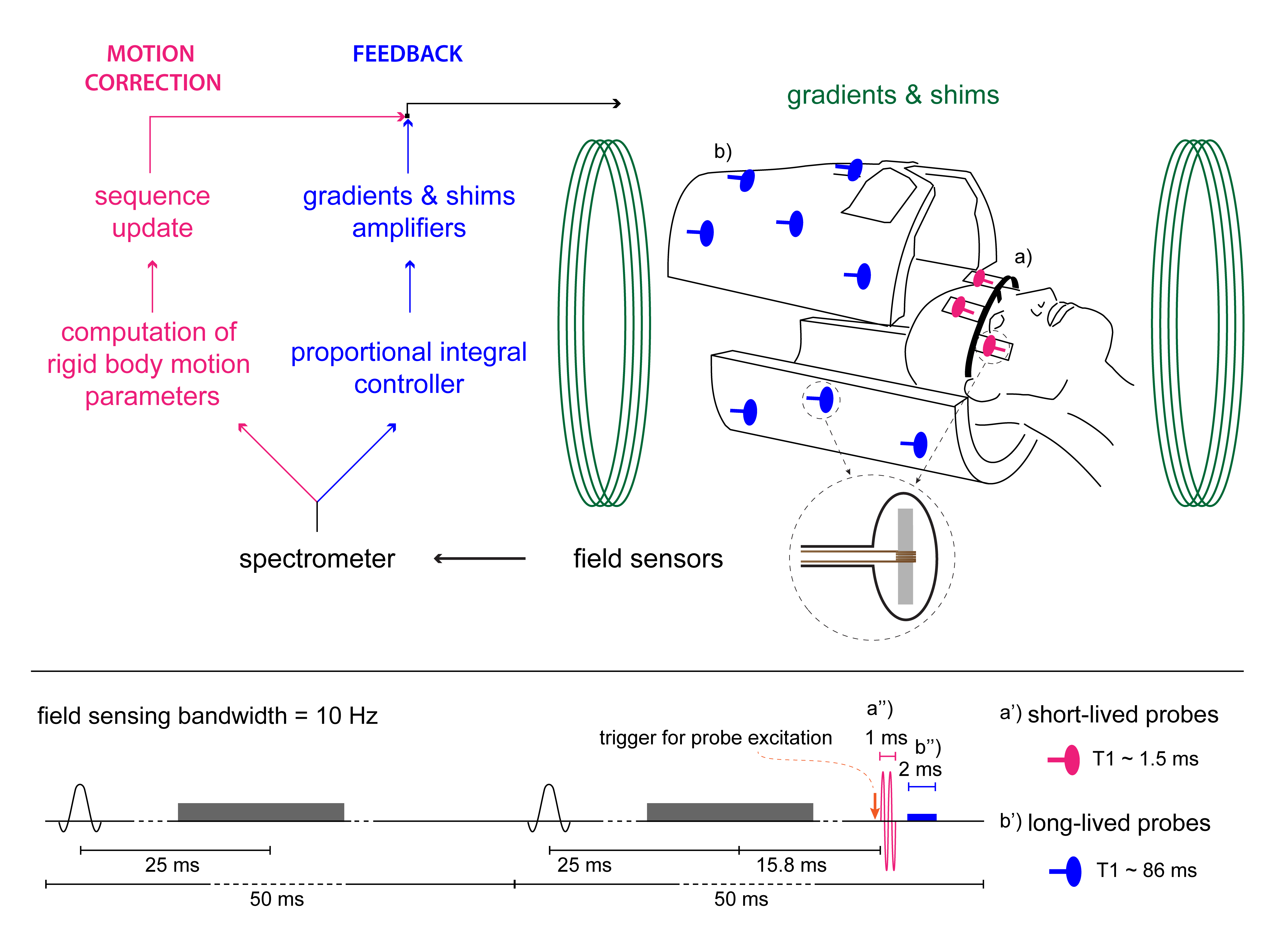
Head tracking data for prospective motion correction was performed with active NMR markers, using four short-lived head-mounted 19F NMR field probes (fig1a&figa’). They were localized using the method of gradient tones (5), a calibration was obtained prior to in-vivo measurements. The tones (Frequencies: 2kHz(x), 3kHz(y), 4kHz(z), amplitudes=7mT/m, duration=1ms) were placed 4ms after the crusher gradients (fig1a’’).
Feedback field control was performed to 2nd order with an array of long lived NMR field probes (8) as described in (9) (fig1b). A proportional-integral controller was used to maintain the field at baseline. For the feedback loop, field fitting started 0.8ms after the tones (2ms after probe excitation) to avoid interaction between PMC and feedback. To fit the field value, 2ms of the phase measurement were used (fig1b’’).
The update rate for both corrections was 10Hz. High-resolution (0.3x0.3x2mm3, FOV:230x230x30mm3) T2* weighted (TR/TE/flip angle:50ms/25ms/45°) data were acquired in 9min37secs at at 7T (Philips Achieva, 32channel receive array, Nova Medical).
A representative scenario, provoking field fluctuations and head motion simultaneously, is the case of limb motion. A volunteer was asked to place the right hand to the hip and move it to the chest and back once a minute (first limb motion 30seconds after acquisition start). This paradigm was repeated four times with the following configuration: PMC and feedback respectively: OFF/OFF, OFF/ON, ON/OFF and ON/ON.
Results
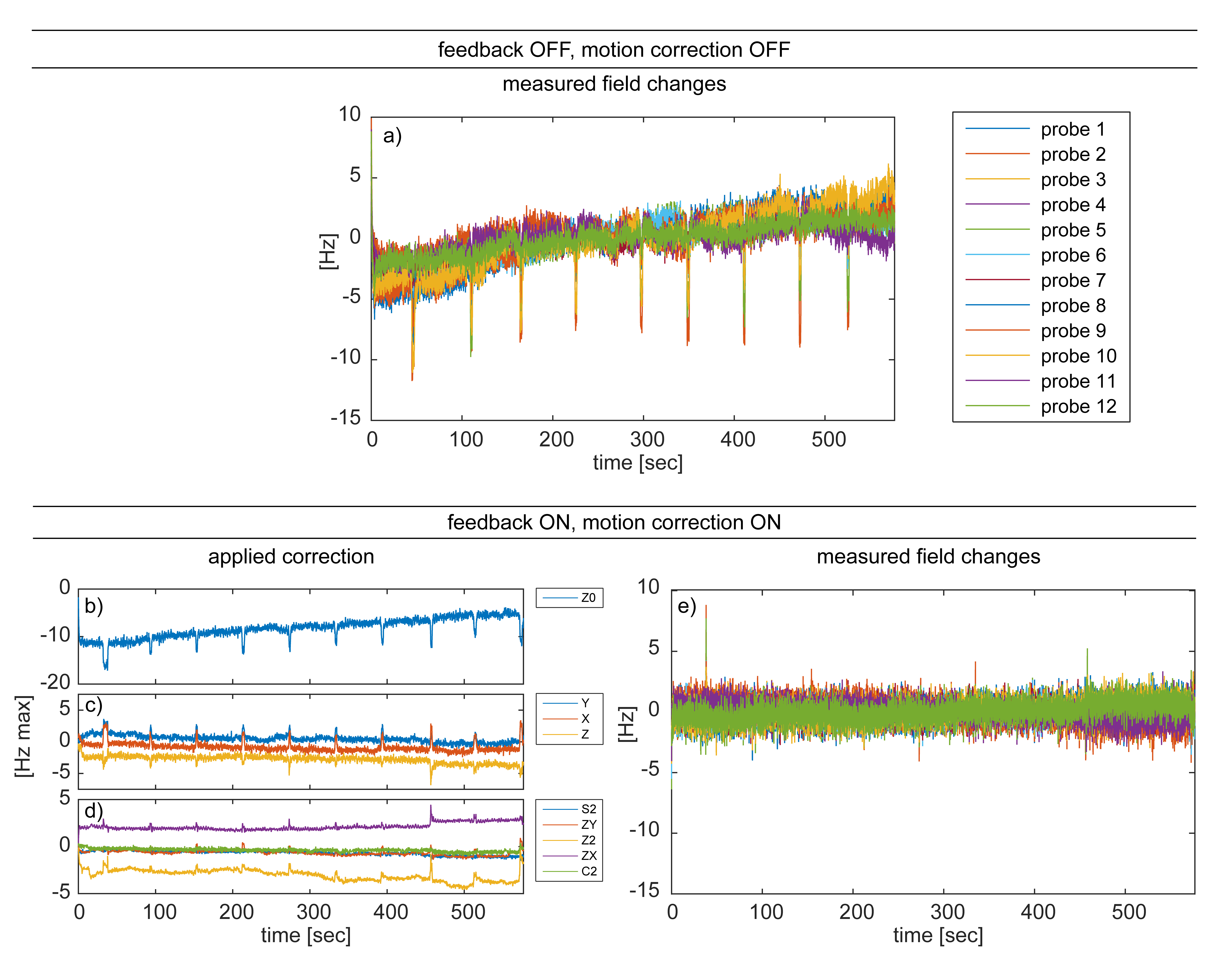
Figure 2 shows field traces for the probes (a). The apparent spikes are due to the field changes caused by limb motion in the OFF/OFF case, (b-d) the correction applied and e) concurrently measured field in the ON/ON case. The field perturbation was successfully removed at the probe position showing that the motion correction did not perturb the field control loop in a way that would have prevented field stabilization.
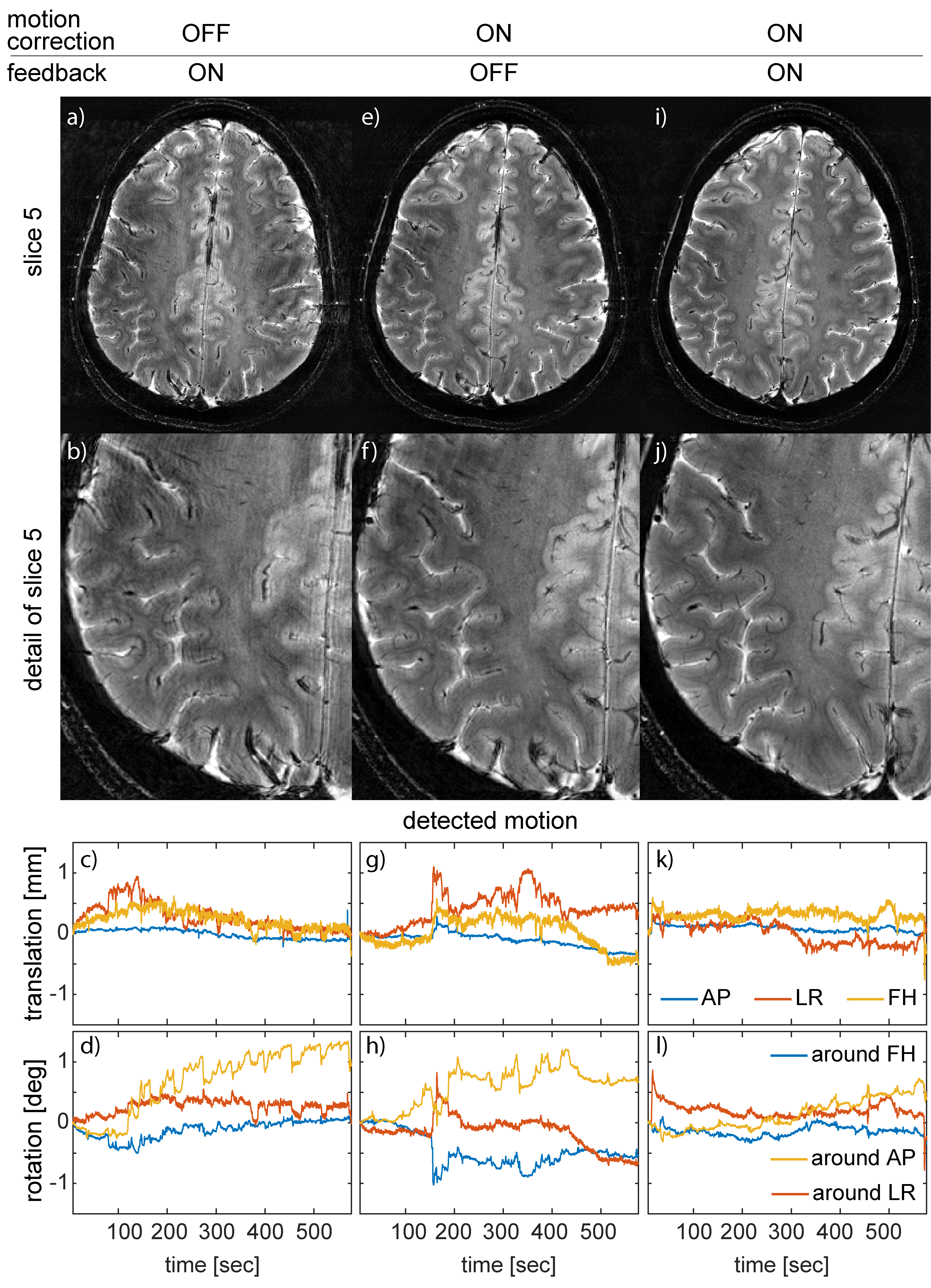
Figure 3 shows a slice and motion parameters for the cases OFF/ON (a-d), ON/OFF (e-h) and ON/ON (i-l). Motion is comparable for all cases (below 1mm/1deg). Motion artefacts are visible in the OFF/ON case, e.g. along the interhemispheric fissure (b). Field perturbation artefacts are visible in the ON/OFF case, e.g. in the grey and white matter next to the skull and motion effects are visibly reduced (f). In the fully corrected case, these artefacts are removed and the image quality is visibly improved.
As it is apparent from the field traces in fig2 and the T2*weighted images in fig3, the data were simultaneously corrected for subject-induced field perturbations and head motion that were caused by limb motion. The two systems did not interact with each other in ways that prevented them to function.
Discussion
Feedback field control combined to PMC was successfully implemented.
The performance of the current set-up is limited to perturbations that are well modelled by 2nd order spherical harmonics. For more severe cases, larger numbers and higher order of shimming coils are required. Extending the system capabilities to higher order correction is straightforward by adapting channel count.
Although 10Hz update rate for both correction is sufficient, it is limited by the probes' T1 used for field measurement. A higher update rate can readily be achieved by employing shorter-lived field probes for field measurement.
By combining real-time field control and motion correction, T2* imaging at high field was made more robust.
Acknowledgements
No acknowledgement found.References
1. Ho et al. Hum Brain Mapp 31 (2010)
2. Versluis et al. NeuroImage 51 (2010)
3. Duerst et al. MRM 73 (2016)
4. MacLaren et al. MRM 69 (2013)
5. Haeberlin et al. MRM 74 (2015)
8. de Zanche et al. MRM 60 (2008)
9. Duerst et al. MRM 76 (2015)
Figures